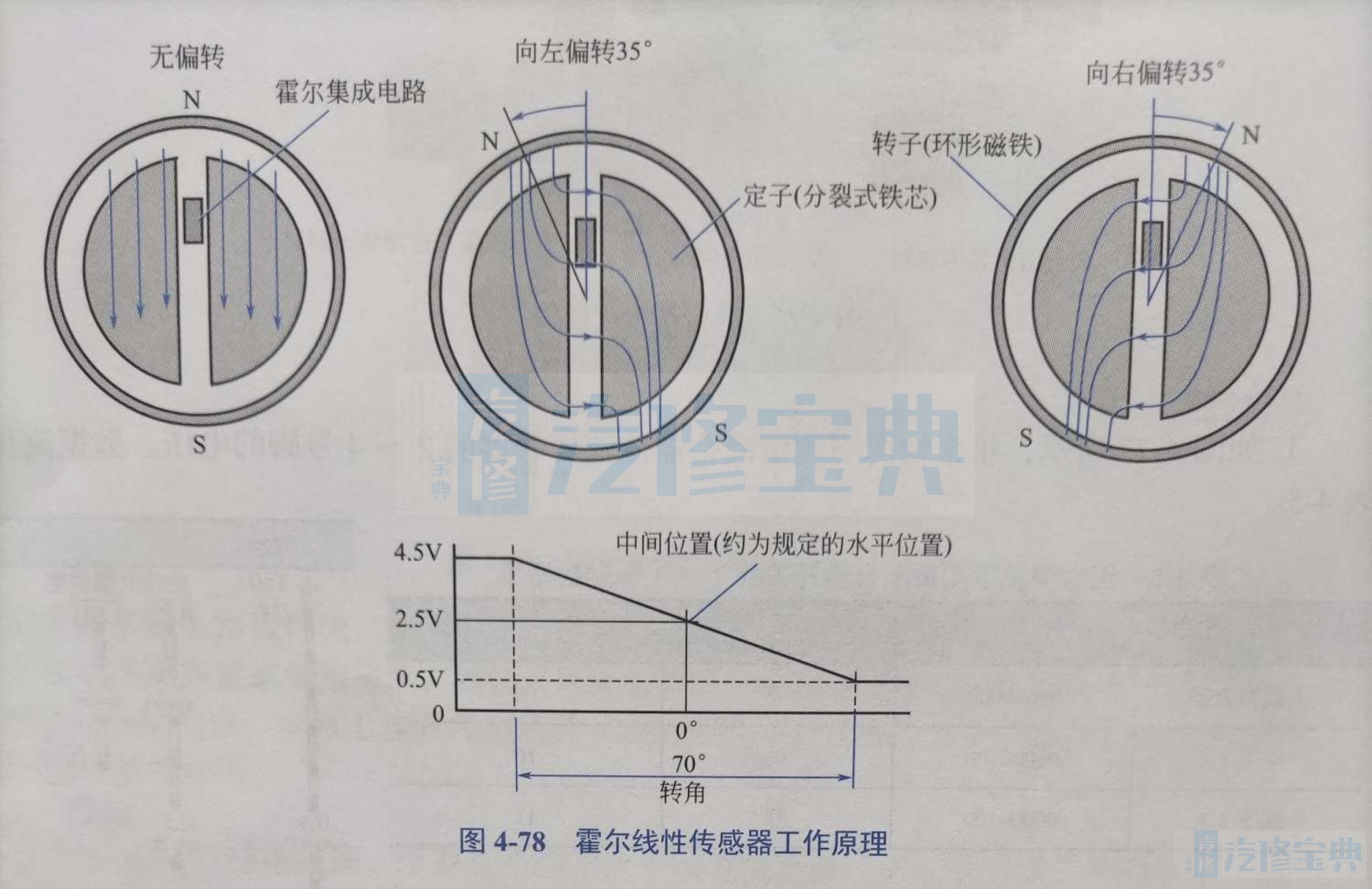
水平位置传感器(G84)用于车身的水平状态。这种传感器是一种非接触式的转角传感器它通过一根连动杆来判定后桥相对于车身的弹簧压缩量。所使用的转角传感器也是根据霍尔原理来工作的。集成在传感器内的测量电子装置将霍尔集成电路信号按角度比例转换成电压信号,如图4-78所示。有一块环形磁铁与传感器曲拐轴连接在一起(转子)。在分为两半的铁芯(定子)之间有一个偏心安装的霍尔集成电路,与测量电子装置共同构成一个部件。 根据环形磁铁的位置不同,穿过霍尔集成电路的磁场会发生变化。由此而产生的霍尔信号就被测量电子装置按角度比例转换成电压信号,这个模拟的电压信号由控制单元J197来使用用于判定车身的水平状态。这种转角传感器也用于大灯照程自动调节装置上。带有大灯照程自动调节装置的车上共装有3个传感器。
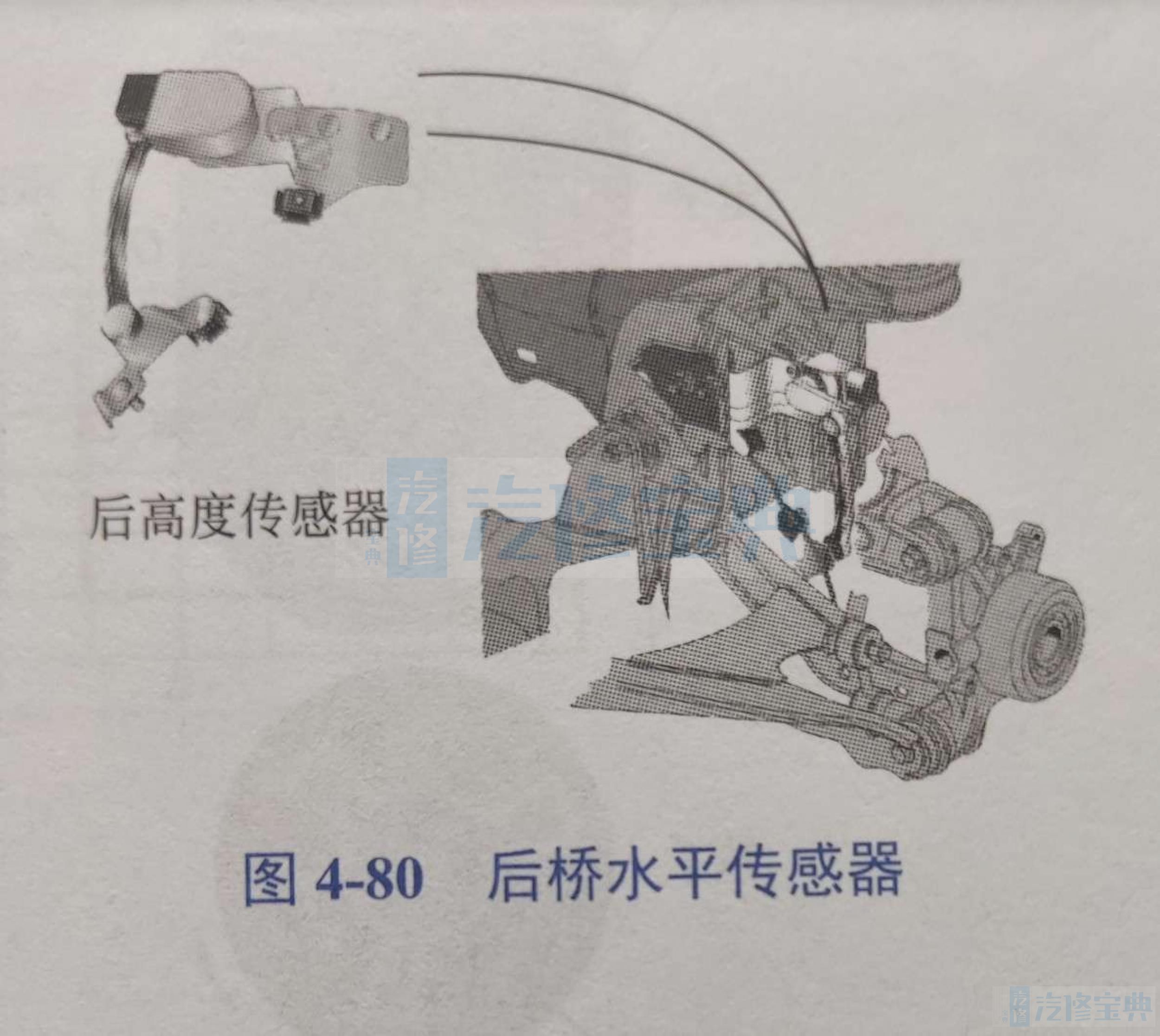
这些水平传感器都是所谓的转角传感器。借助一个连杆机构可将车身水平变化转换成角度变化,如图4-79和图4-80所示。该角度传感器是非接触式的,采用感应原理。这种水平传感器的一个特点是,它可产生两个不同的且与转角成比例的输出信号。这种传感器既可用于空气悬架,也可用于大灯照程调节。其中一个输出信号提供一个与角度成比例的电压(用于大灯照程调节),另一个输出信号提供一个与角度成比例的PwM信号(用于空气悬架)。这四个水平传感器结构是相同的,只是支架和连杆根据左右及车桥的不同而有所不同。左、右传感器臂的偏转方向是相反的,所以输出的信号也是相反的。例如,车身一侧的传感器输出信号在空气悬架压缩时如果是增大的话,那么在车身另一侧该输出信号则是减小的。