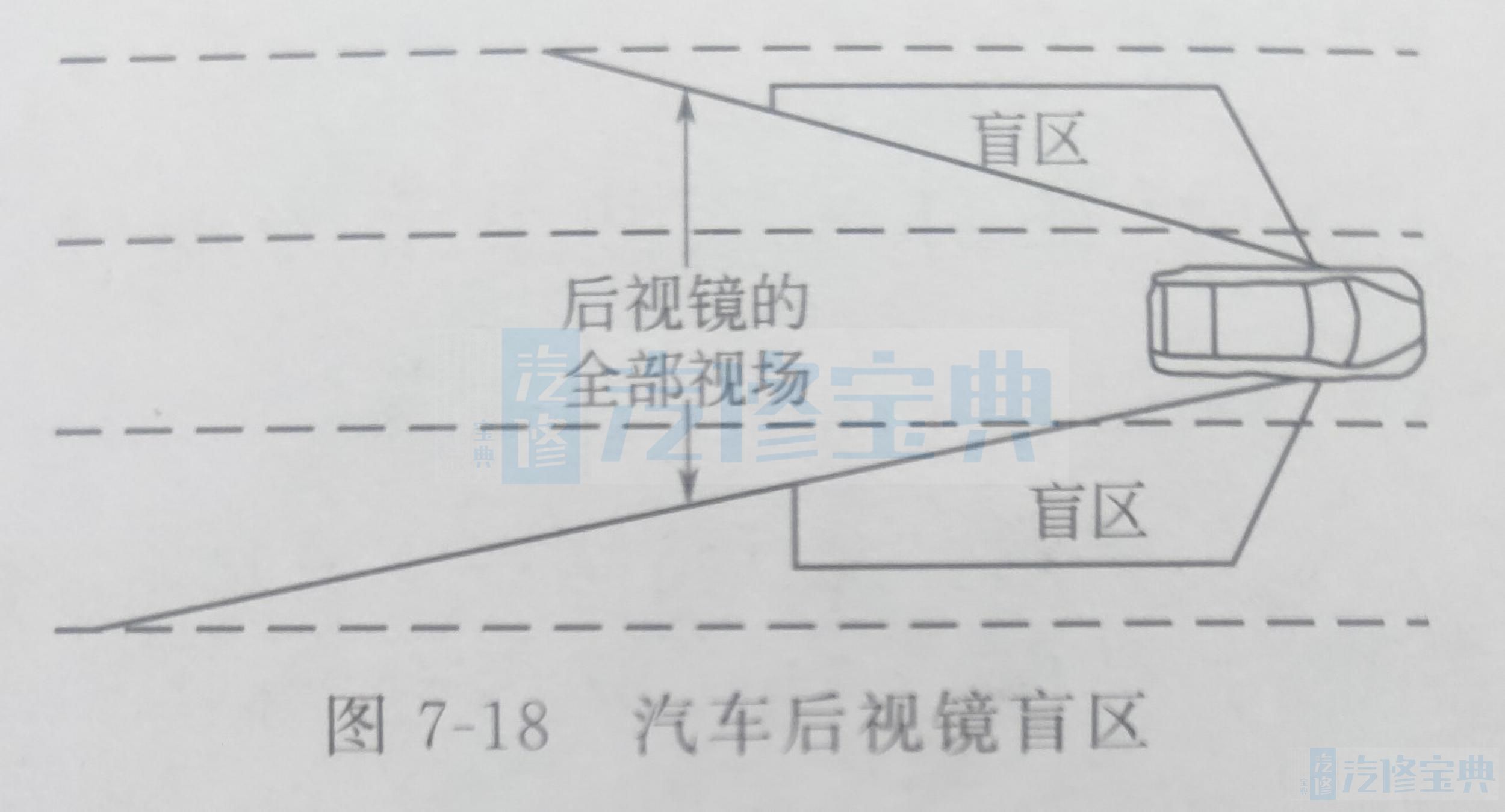
一、汽车并线辅助系统定义。 由于汽车后视镜本身存在视觉盲区,如图7-18所示,以致驾驶员无法及时、准确地获知盲区内车辆的动向,因此,车辆并线剐蹭或碰撞便成为常见的一种交通事故。 汽车并线辅助系统也称盲区监测系统,它是通过车载传感器检测后方来车,在左右两个后视镜内或者其他地方提醒驾驶员后方安全范围内有无来车,从而消除视线盲区,提高行车安全,如图7-19所示。
汽车盲区检测除检测车辆以外,还应包括城市道路上汽车盲区内行人、骑行者的检测,以及高速公路弯道的检测与识别等。
二、汽车并线辅助系统组成。
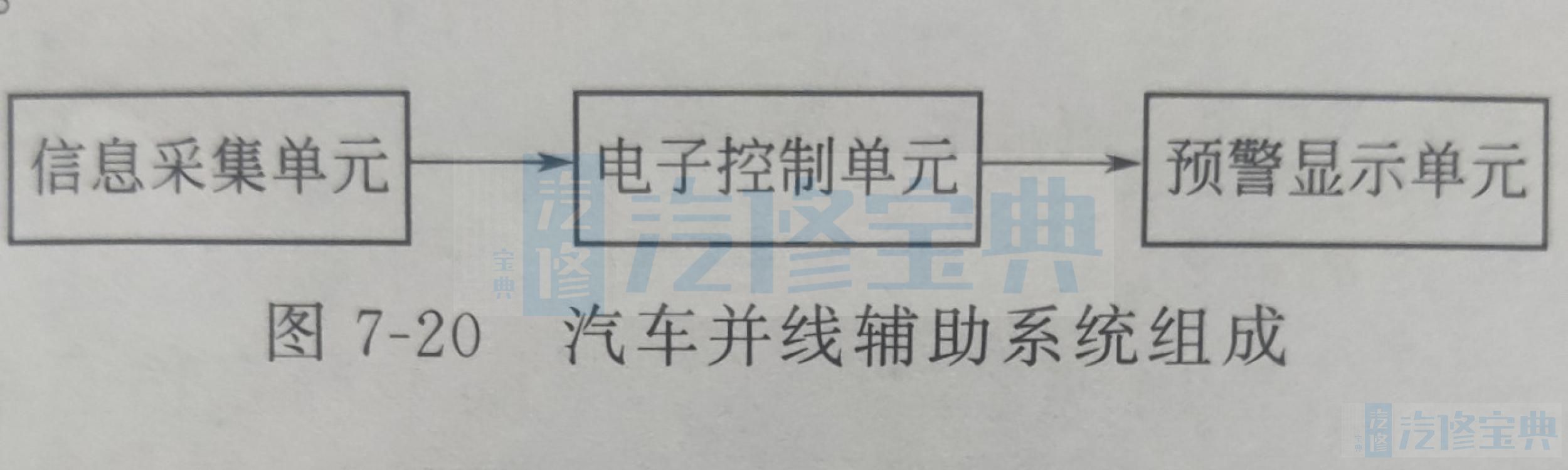
汽车并线辅助系统一般由信息采集单元、电子控制单元和预警显示单元等组成,如图7-20所示。
(1)信息采集单元信息采集单元利用传感器检测汽车盲区里是否有行人或其他行驶车辆,并把采集到的有用信息传输给电子控制单元,传感器有超声波传感器、摄像头或探测雷达等。
(2)电子控制单元电子控制单元对采集到的信息进行分析判断,向预警显示单元发送信息。
(3)预警显示单元预警显示单元接收电子控制单元的信息,如果有危险,则发出预警显示,此时不可变道。
并线辅助系统的传感器一般安装在后保险杠两侧,可以实现盲区检测、并线辅助和倒车辅助。
三、汽车并线辅助系统原理。
汽车并线辅助系统是通过安装在车辆尾部或侧方的传感器检测后方来车或行人,传感器有视觉传感器、激光雷达等,电子控制单元对于传感器采集的信息进行分析处理,如果盲区内有车辆或行人,预警显示单元发出报警。
对于智能网联汽车,也可以采用V2V和V2I之间通信,告知驾驶员盲区内是否有车辆或行人。
四、汽车并线辅助系统要求。
汽车并线辅助系统具有以下要求。
(1)实时性汽车并线辅助系统是一种以预防为主的车载装置,需要及时发现盲区内潜在的危险并发出警告,这无疑要求系统必须具有良好的实时性。尤其在高速公路上,车速快,如何实现实时检测是一个技术难点。实时性是整个系统具有实用价值的前提。
(2)有效性和可靠性系统的功能由其有效性来实现,同时需要一定的可靠性来保障。由于实际道路的复杂性、多样性,系统的有效性和可靠性受到挑战。
骑行者作为非刚性物体,由于各种因素导致其外形在不断的变化,对检测的有效性造成干扰;车道线残缺、其他交通工具的遮挡以及建筑或桥梁的遮挡等都会使得弯道检测失真。
实时性要求对传感器获取的数据进行快速地分析和处理,这将对准确性有所影响,从而使整个检测过程更加困难。
五、汽车并线辅助系统应用实例。
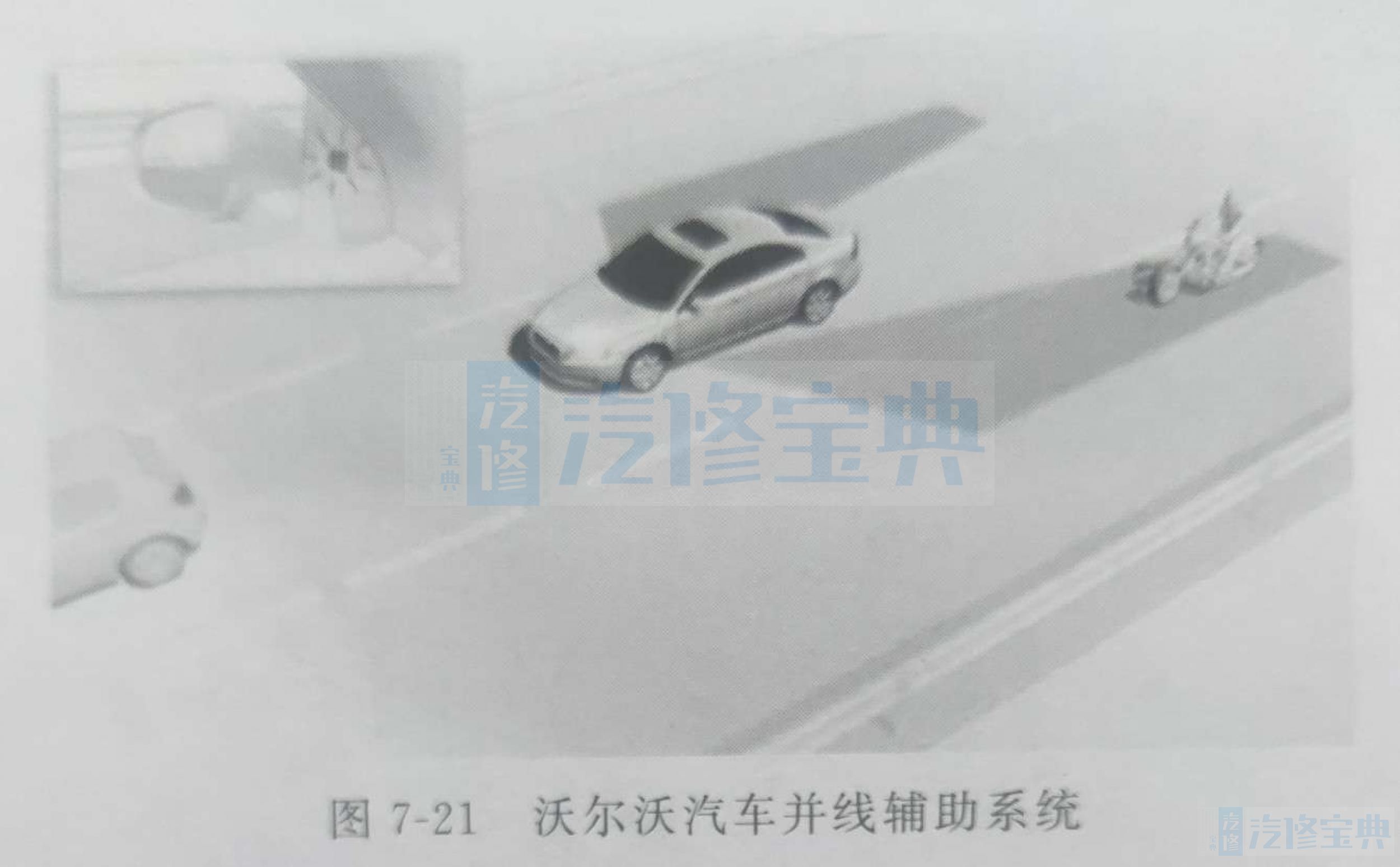
沃尔沃汽车的并线辅助系统(也称盲点监测系统)如图7-21所示。位于外后视镜根部的摄像头会对距离3m宽、9.5m长的一个扇形盲区进行25帧/s的图像监控,如果有速度大于10km/h、且与车辆本身速度差在20~70km/h之间的移动物体(车辆或者行人)进入该盲区,系统对比每帧图像,当系统认为目标进一步接近时,A柱上的警示灯就会亮起,防止出现事故。沃尔沃汽车盲点信息监测系统在左右两个反光镜下面内置有两个摄像头,将后方的盲区影响反馈到行车电脑的显示屏幕上,并在后视镜的支柱上有并线提醒灯提醒驾驶员注意以消除盲区。