一、汽车自动刹车辅助系统定义。 汽车自动刹车辅助( Automatic Braking Assistance,AEB)系统可以预知潜在的碰撞危险并及时通知驾驶员,而且在必要的情况下,此系统会自动控制制动踏板完成刹车操作,以避免或减轻碰撞伤害,如图7-22所示。
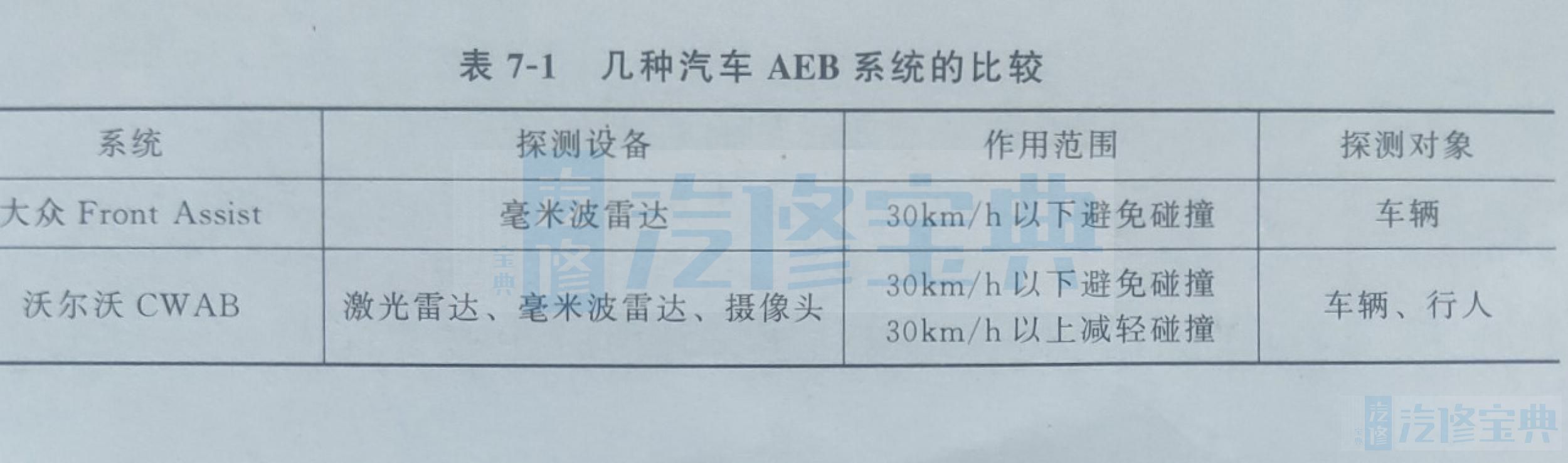
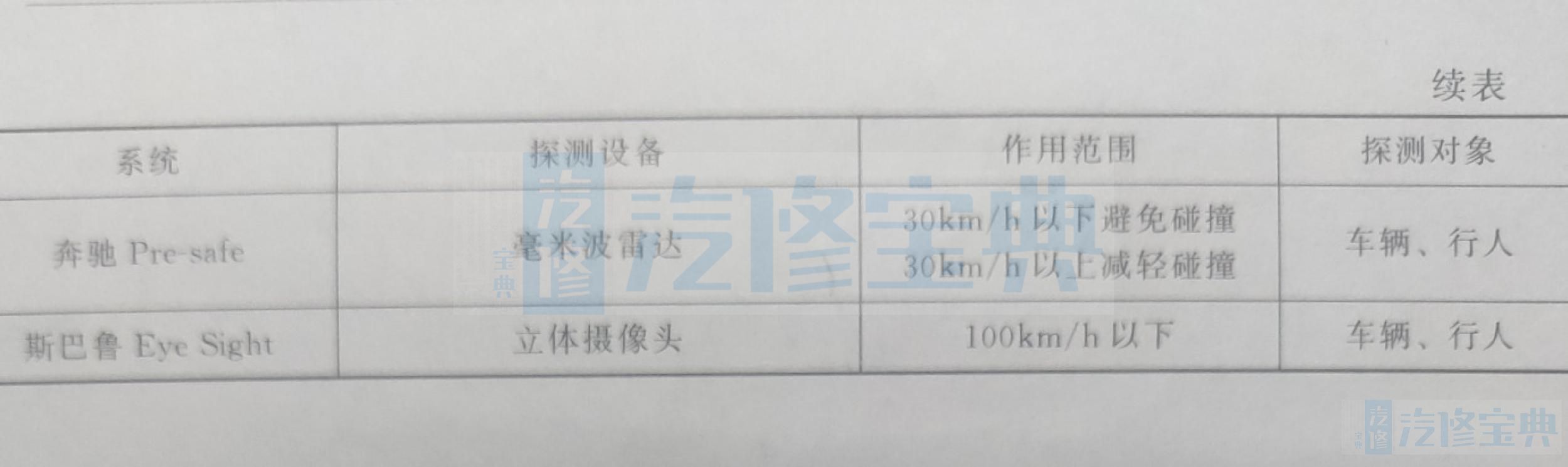
目前,全球主流的汽车厂商都有自己的预碰撞安全系统,不过各个厂商的叫法各不相同,功能的实现效果及技术细节会有所不同,如大众 Front Assist预碰撞安全系统、沃尔沃CWAB系统、奔驰 Pre-safe安全系统、斯巴鲁 Eye Sight安全系统等,它们的比较见表7-1。
二、汽车自动刹车辅助系统组成。
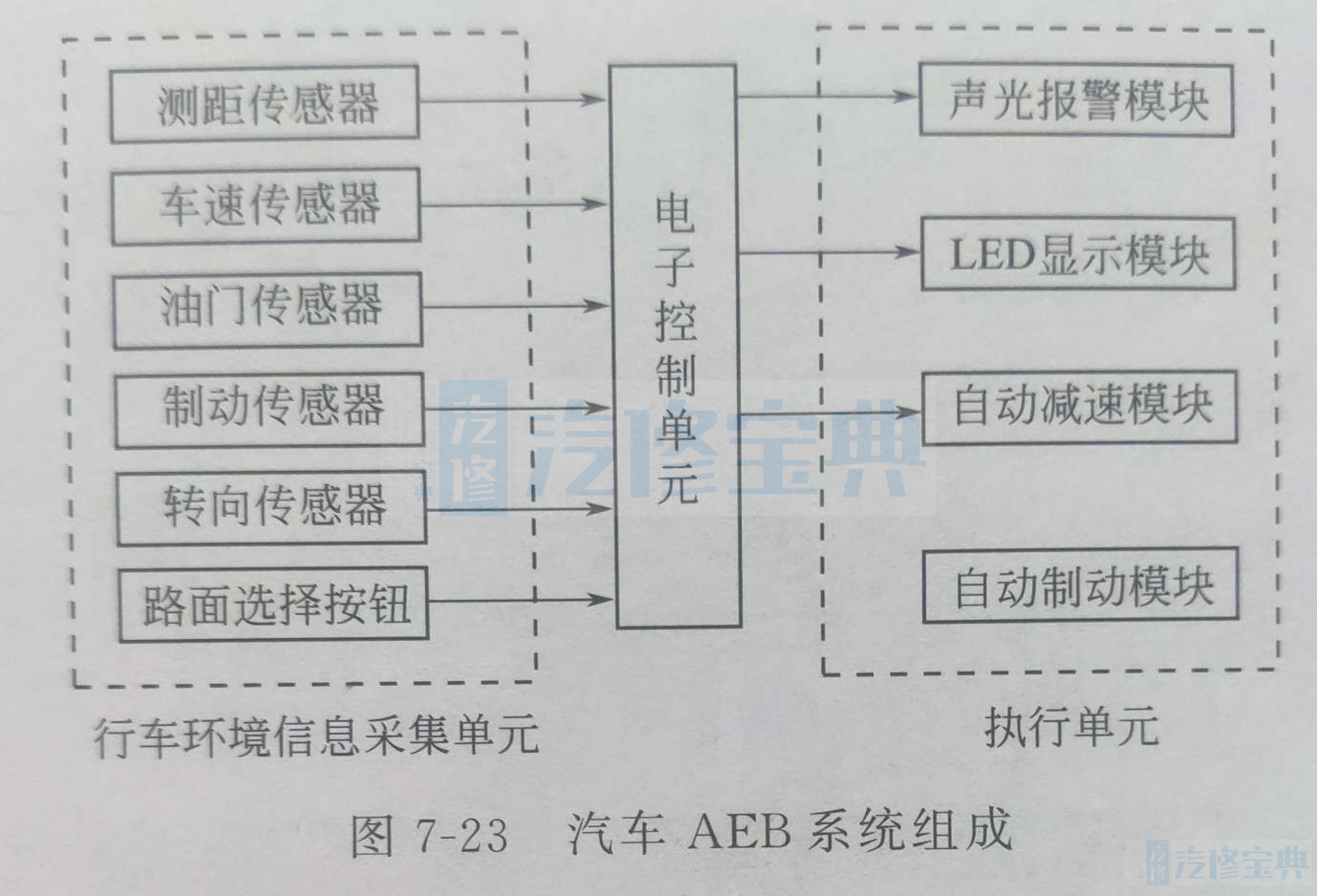
汽车AEB系统主要由行车环境信息采集单元、电子控制单元和执行单元等组成,如图7-23所示。
(1)行车环境信息采集单元行车环境信息采集单元由测距传感器、车速传感器、油门传感器、制动传感器、转向传感器、路面选择按钮等组成,对行车环境进行实时检测、得到相关行车信息。测距传感器用来检测本车与前方目标的相对距离以及相对速度,目前,常见的测距技术有超声波测距、毫米波雷达测距、激光测距、红外线测距和视频传感器测距等:车速传感器用来检测本车的速度;
油门传感器用来检测驾驶员在收到系统提醒报警后是否及时松开油门,对本车实行减速措施;制动传感器用来检测驾驶员是否踩下制动踏板,对本车实行制动措施;转向传感器用来检测车辆目前是否正处于弯道路面行驶或者处于超车状态,系统凭此来判断是否需要进行报警抑制;路面选择按钮是为了方便驾驶员对路面状况信息进行选择,从而方便系统对报警距离的计算。需要采集的信息因系统不同而不同。所有采集到的信息都将被送往电子控制单元。
(2)电子控制单元电子控制单元接收行车环境信息采集单元的检测信号后,综合收集到的数据信息,依照一定的算法程序对车辆行驶状况进行分析计算,判断车辆所适用的预警状态模型,同时对执行单元发出控制指令。
(3)执行单元执行单元可以由多个模块组成,如声光报警模块、LED显示模块、自动减速模块和自动制动模块等,根据系统不同而不同。它用来接收电子控制单元发出的指令,并执行相应的动作,达到预期的预警效果,实现相应的车辆刹车功能。当系统检测到存在危险状况时,首先进行声光报警,提醒驾驶员;当系统发出提醒报警之后,如果驾驶员没有松开油门,则系统会发出自动减速控制指令:在减速之后系统检测到危险仍然存在时,说明目前车辆行驶处于极度危险的状况、需要对车辆实施自动强制制动。
三、汽车自动刹车辅助系统原理。
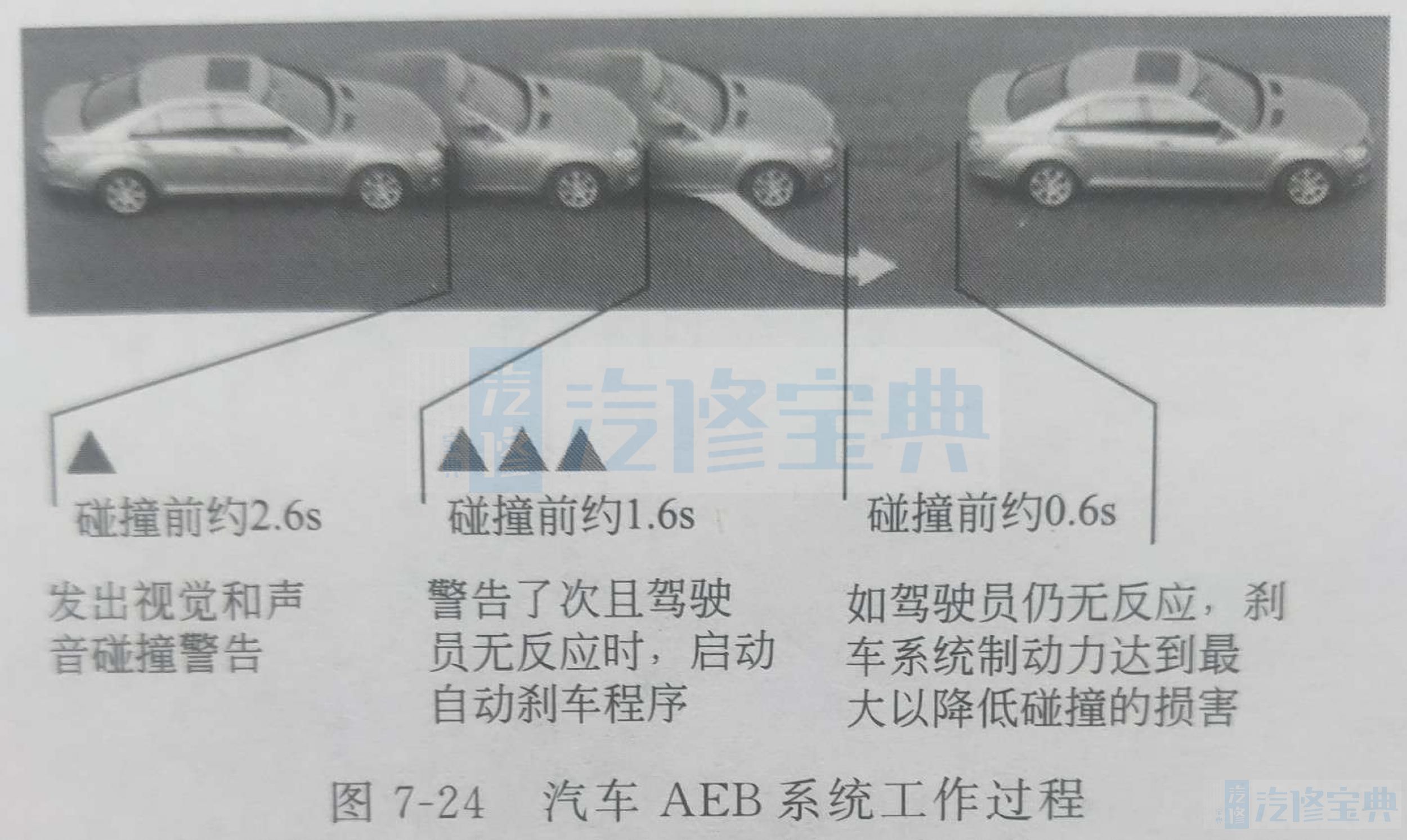
汽车AEB系统利用测距传感器测出与前车或者障碍物的距离,然后利用电子控制单元将测出的距离与报警距离、安全距离等进行比较,小于报警距离时就进行报警提示,而小于安全距离时即使在驾驶员没来得及踩制动踏板的情况下,AEB系统也会启动,使汽车自动制动,从而为安全出行保驾护航。
图7-24所示为某汽车AEB系统工作过程示意图。
四、汽车自动刹车辅助系统类型。
欧洲新车星级评价( E-NCAP)以多年来统计的事故数据作为依据,对汽车AEB系统使用环境提出三种应用类型,即城市专用AEB系统、高速公路专用AEB系统和行人保护专用AEB系统。
(1)城市专用AEB系统城市交通事故大多发生在路口等待、交通拥堵等情况下,因为驾驶员注意力分散,忽视了自身的车速和与前车的距离,造成碰撞事故。城市内驾驶特点是速度慢,易发生不严重的碰撞。城市专用AEB系统可以监测前方路况与车辆移动情况,如果探测到潜在的风险,它将采取预制动措施,提醒驾驶员风险的存在;如果在反应时间内未接到驾驶员的指令,该系统则会自动制动来避免事故。而在任何时间点内,如果驾驶员采取了紧急制动或猛打转向盘等措施,该系统将停止。
马自达阿特兹2015款搭载的低速刹车辅助系统(SCBS)属于城市专用AEB系统的一种。SCBS系统能够在车辆低速行驶时主动侦测同前方车辆的距离,当车辆在4~30km/h车速时,SCBS系统会自动打开,通过判断本车与前方车辆的距离,当监测到两辆车距离过近时,该系统会自动刹车减速,避免或减轻伤害;在20km/h速度以下时,会自动停车,避免追尾前车或减轻对前车的伤害。有权威数据显示,在大城市的车辆追尾、刚蹭事故中,有70%以上的事故发生在车辆中低速行驶时,特别在拥堵路况上车辆走走停停、驾驶员走神时更是追尾和剐蹭事故的主要原因。
(2)高速公路专用AEB系统在高速公路上发生的事故与城市交通事故相比,其特点不同。高速公路上的驾驶员可能由于疲劳驾驶,当意识到危险时车速过快无法控制车辆。为了能保证这种行驶情况下的安全,AEB系统必须能用相应的控制策略来应对。系统在车辆高速行驶状态下工作,首先通过报警来提醒驾驶员潜在的危险。如果在反应时间内,驾驶员没有任何反应,第二次警示系统将启动,比如突然的制动或安全带收紧,此时制动器将调至预制动状态;如果驾驶员依然没有反应,那么该系统将会自动实施制动。
(3)行人保护专用AEB系统除探测道路上的车辆外,还有一类AEB系统是用来检测行人和其他公路上弱势群体的。通过车上一个前置摄像头传来图像,可以辨别出行人的图形和特征,通过计算相对运动的路径,以确定是否有撞击的危险。
如果有危险,系统可以发出警告,并在安全距离内,制动系统采用全制动使车辆停止行驶。实际情况下预测行人行为是比较困难的,系统控制的算法也非常复杂。该系统需要在危险发生前更迅速地做出正确判断,更有效地做出响应,防止危险事态发生,同时也需要避免系统在特定情况下发生误触发,如图7-25所示。
五、汽车自动刹车辅助系统测试方法。
E-NCAP根据AEB系统工作形式不同,将其分为AEB结合碰撞预警功能(FCW)、单独AEB以及单独FCW三种情况。 E-NCAP试验评价方法中将汽车AEB系统测试方法分为车与车工况(CCR)、车与行人工况(CP)。
1、车与车工况。
车与车工况主要分为以下三种情况。
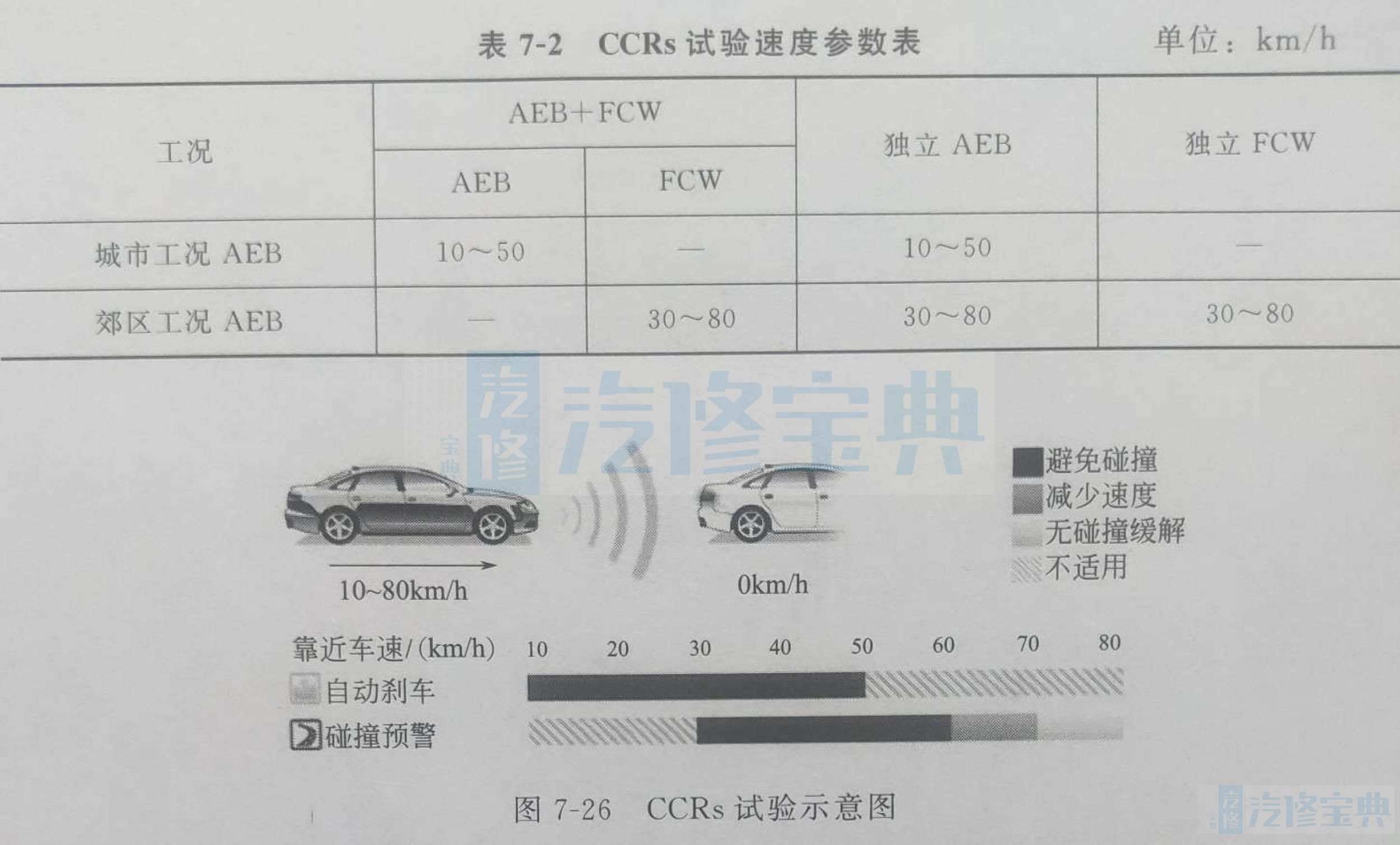
(1)车与车后方接近静态试验(CCRS)前方目标车辆(EVT)静态下后方测试车辆(UVT)接近状况。根据实际调查情况,车辆事故的第一种普遍情况是前车静态下发生的。根据系统分类和工作形式分类,定义测试流程和方法见表7-2,示意图如图7-26所示。
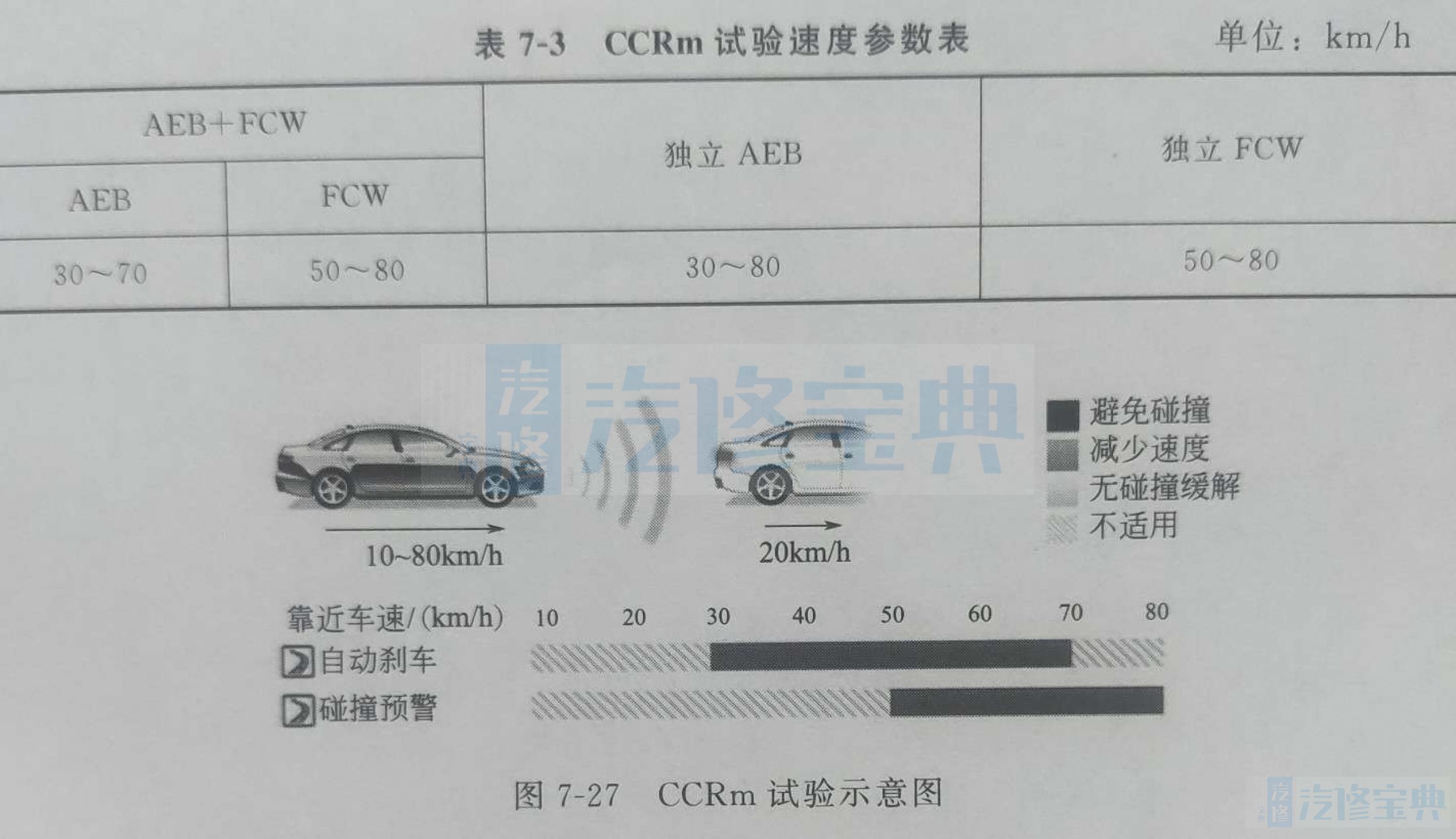
(2)车与车后方接近移动试验(CCRm)前方EVT匀速移动状态下后方UVT接近状况。根据实际调查情况,车辆事故的第二种情况是在前车匀速移动的状况下发生的。根据系统分类和工作形式分类,定义相应的测试流程和方法见表7-3,示意图如图7-27所示。
(3)车与车后方接近制动试验(CCRb)前方EVT匀速移动中突然制动状态下后方UVT接近状况。根据实际调查情况,车辆事故的第三种情况是在前车移动中突然制动的状况下发生的。根据系统分类和工作形式分类,定义相应的测试流程和方法见表7-4,示意图如图7-28所示。
以上三种测试方法是根据前方EVT的状态变化,后方UVT在不同车速下对AEB系统进行全面的性能测试。其中,CCRs和CCRm试验根据表7-1和表7-2中提供的车速区间,从小到大用5km/h或者10km/h的车速间隔进行试验。
CCRb试验规则是在两车都以50km/h速度行驶,两车间距为12m和40m的两种情况下,前车模拟实际情况,分别进行2m/s2和6m/s2的减速度进行制动,以此来测试系统的性能。
2.车与行人工况(CP)。
CP工况主要分为以下三种情况。
(1)CP1清晰状态下遇到行人从左侧人行道进入车道。
(2)CP2隐蔽状态下遇到行人从左侧人行道进入车道。
(3)CP3清晰状态下遇到行人从右侧人行道快步进入车道。
目前,车与行人工况还未正式加入测试规范中,试验方法和规范也正在研究过程中。
目前,美国、日本、欧盟等国家和地区已纷纷将AEB纳入新车安全性评价项目中,为自动驾驶和无人驾驶打下基础。
六、汽车AEB系统应用实例。
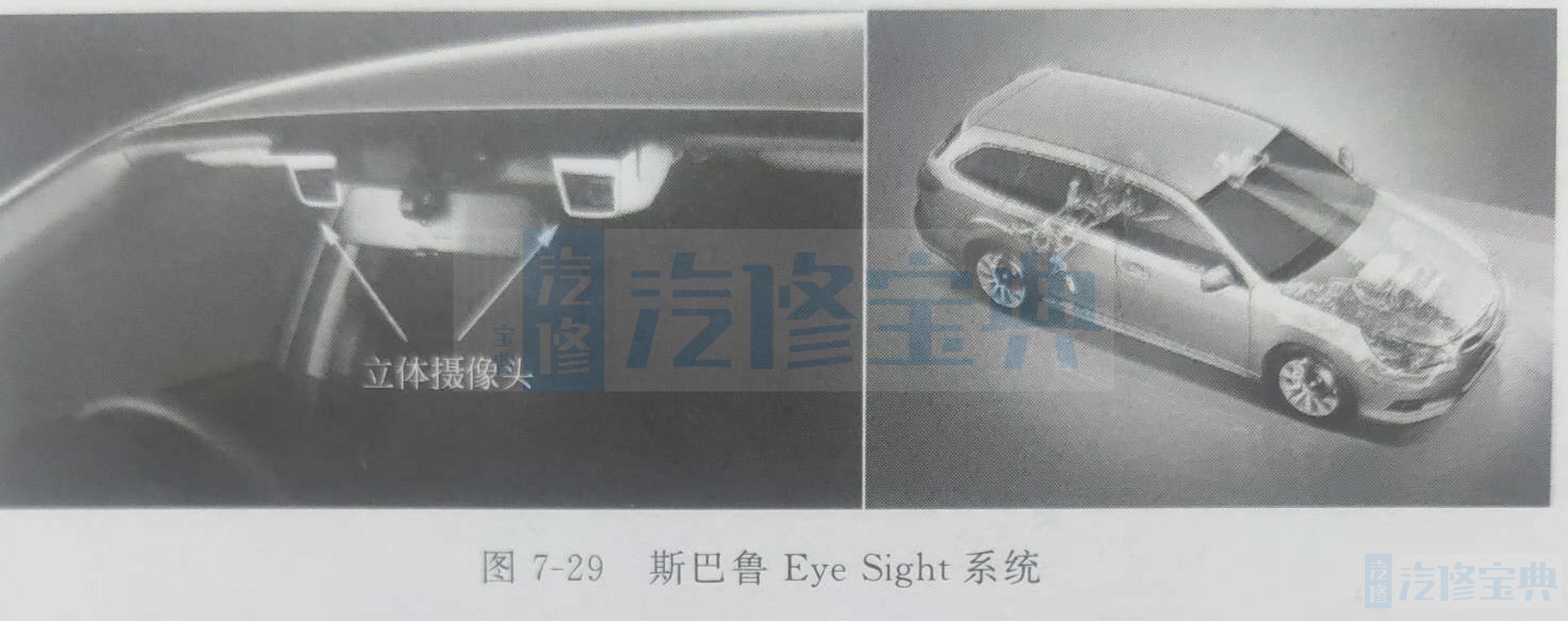
斯巴鲁 Eye Sight系统主要是通过前风挡玻璃的两个立体摄像头,模拟人类的立体视觉,来判断车辆前方的路口,探测范围为79m,可以识别汽车、行人、摩托车,如图7-29所示。
斯巴鲁 Eye Sihgt系统在前后车速不同的情况下采取不一样的措施。当车速差低于30km/h时,系统能识别车辆、行人的路径,如检测到危险时,驾驶员没有及时刹车,系统可以自动协助制动,甚至完全把车制动停止,避免发生碰撞。而在一些野外路段,也可以将系统关闭。而在车速差30km/h以上时,系统不是以刹停的方式而是适当减速,以最大限度降低碰撞速度。
沃尔沃CWAB系统以摄像头、雷达同时探测,雷达负责探测车辆前方150m内的范围,摄影镜头则负责前方55m内的车辆动态,如图7-30所示。当与前车距离过近或路中间有行人时,会通过类似于刹车灯的警示灯亮起的方式,提醒驾驶员注意。如果发出警示后碰撞的风险仍然在增加,制动支持功能会被激活。刹车片能缩短响应时间,预充液压增强制动压力,确保驾驶员在没用力踩刹车的情况下也能实现有效制动。如果驾驶员没有实施制动而系统预见碰撞即将发生,制动器将被激活,自动采取制动措施。
除了CWAB系统外,沃尔沃还研发了城市安全系统与之相配合,该系统在车速30km/h以下时启动,自动探测前方10m内是否有静止或移动中的车辆。如果前车突然刹车,而驾驶员系统发出的警告未采取任何行动,车辆就会自动刹车。如果两车的相对速度差低于15km/h,该系统启动后可以使车辆自动刹停,避免碰撞的发生。当两车的相对速度差在15~30km/h之间时,该系统可在碰撞发生前将速度降至最低,最大限度地减少本车与前车乘员及车辆因碰撞而产生的损伤。
随着汽车安全技术涉及的范围越来越广、越来越细,现代汽车正朝着更加智能化、自动化和信息化的机动一体化方向发展。汽车自动刹车系统应和其他控制系统相结合,采用智能型传感器、快速响应的执行器、高性能电控单元、先进的控制策略、无线通信等技术以提高汽车的主动安全性,使车辆从被动防撞减少伤害向主动避撞减少事故的方向发展。