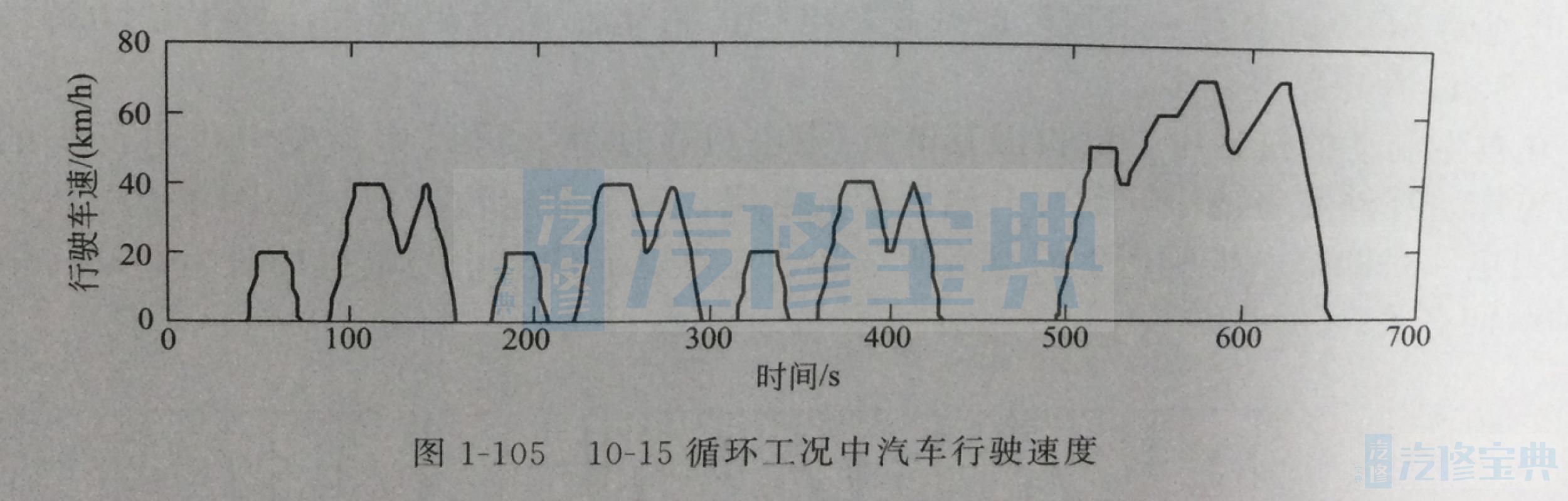
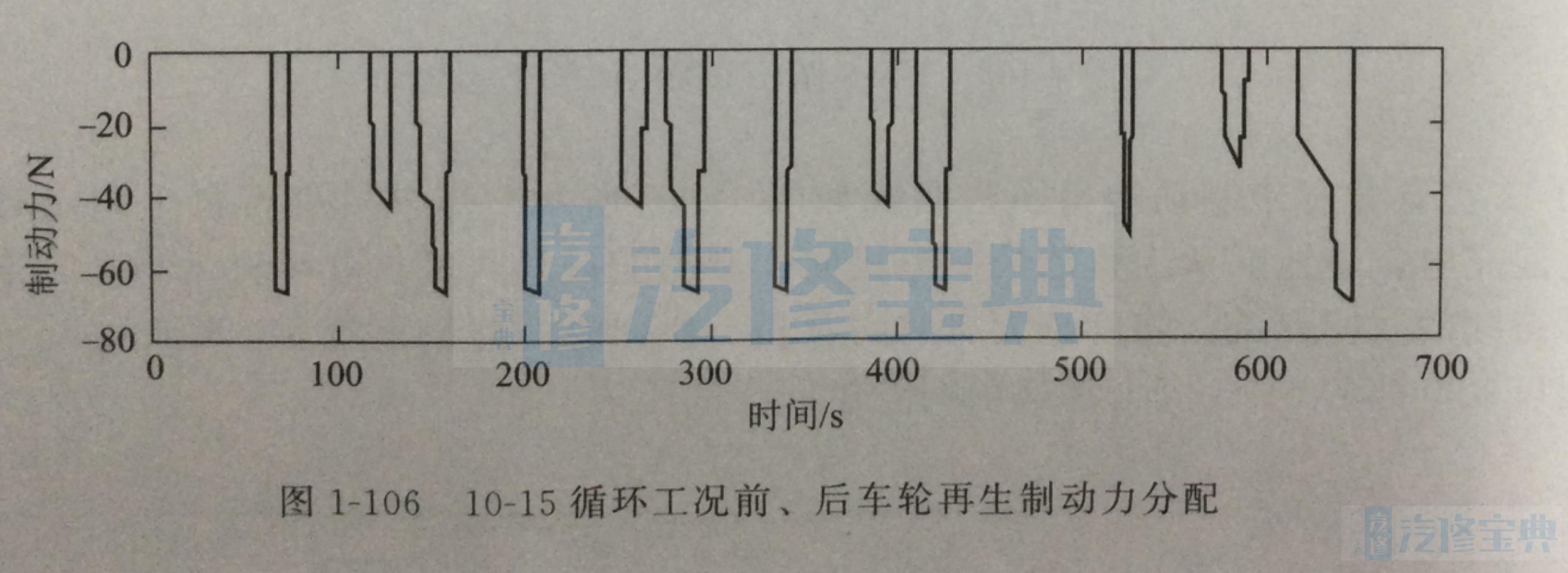
在 ADVISOR中建立某四轮驱动电动汽车的制动能量回收仿真模型,选择公路行驶的10-15循环工况和典型的停车制动工况进行仿真,通过仿真结果考察制动过程中制动力的分配、能量回收效率和电池的充电电流等,对所建立的四轮轮毂驱动下的制动能量回收控制策略进行评价。 1.10-15循环工况仿真: 10-15循环工况中汽车行驶速度如图1-105所示。10-15循环工况总运行时间为660s,平均车速为22.68km/h,最高行驶车速为70km/h,行驶过程中共停车7次。10-15循环工况下,汽车行驶速度变化较小,平均速度较低,制动平缓,符合城市循环过程仿真。 10-15循环工况前、后车轮再生制动力分配如图1-106所示。制动时,前、后车轮获得
的再生制动力是相等的。这与所制定的制动能量回收控制策略有关。车轮上再生制动力的大小还与循环中汽车速度变化的快慢有关。当车速变化较大时,整车的制动强度增大,从而轮毂电机的再生制动强度也增大,再生制动力相应增大。
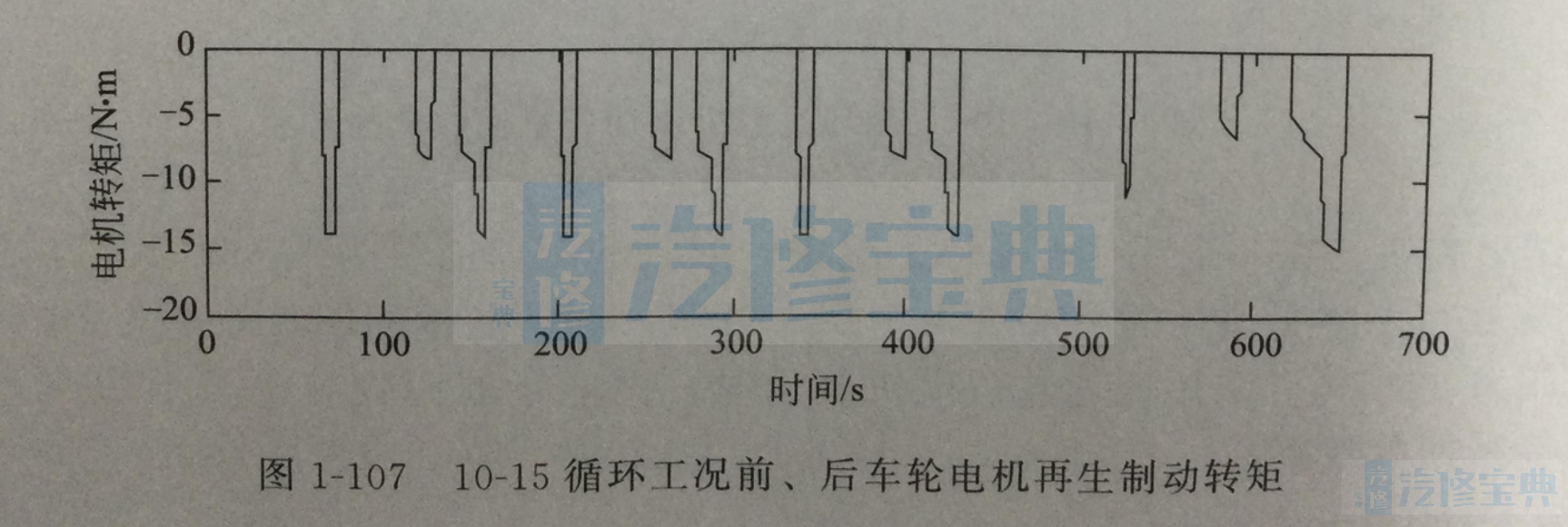
10-15循环工况前、后车轮电机再生制动转矩如图1-107所示。前、后车轮电机的再生制动力矩是相同的。10-15循环工况下,整车的制动强度较小,前、后车轮所负责的再生制动力相等,电机的再生制动转矩也是相等的。
10-15循环工况电池的SOC值的变化曲线如图1-108所示。电动汽车采用全电驱动,在行驶过程中,电池向电机提供能量,SOC值逐渐减小。在再生制动作用下,电机向电池充
电,电池的SOC值会有一定程度的升高,电机的再生制动转矩越大,再生制动持续的时间越长,SOC值升高得越多。
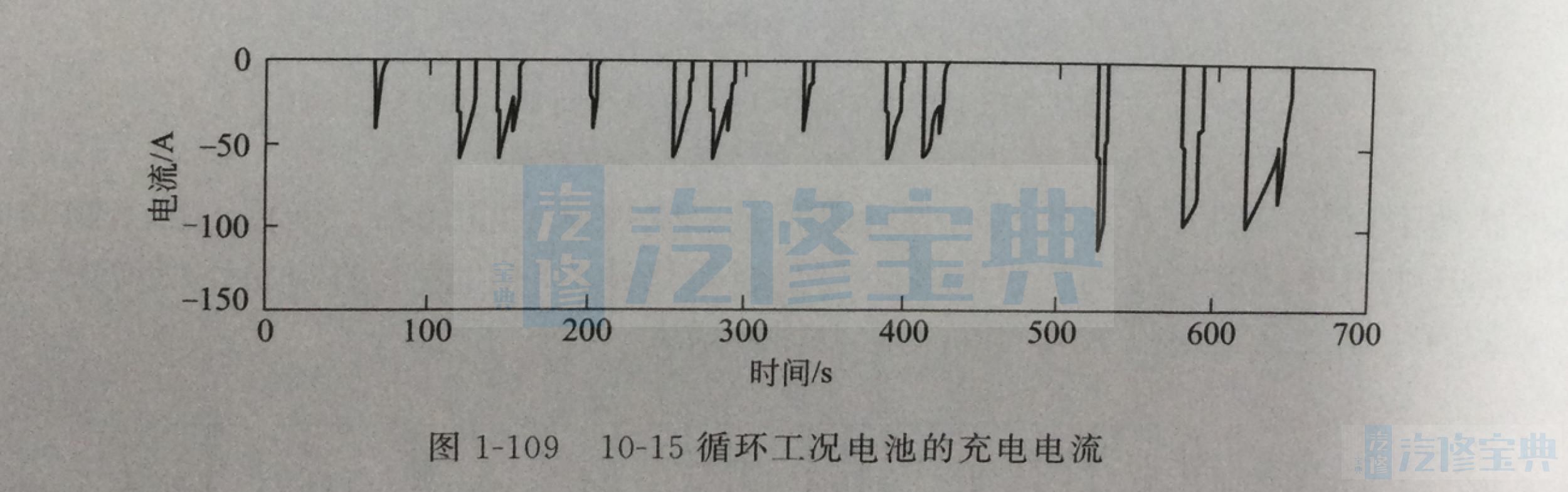
在再生制动的过程中,电机因其电机/发电机可逆性,可以作为发电机将汽车的动能转化为电能,存储在电池中,此时电池显示负电流,表示向电池充电,如图1-109所示,此时的充电电流是四个电机所产生的电流的总和。充电电流的大小与电机的再生制动转矩和再生制动时间有关。
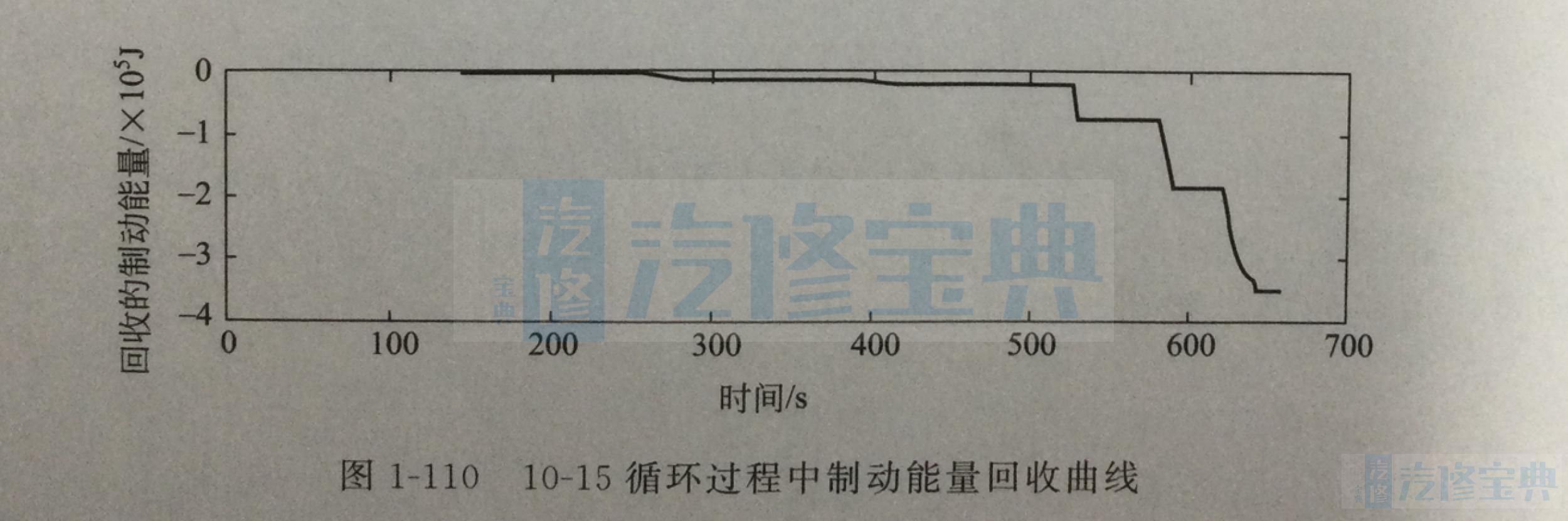
10-15循环过程中制动能量回收曲线如图1-110所示。当电机进行再生制动时,电机向动力电池充电,电池默认为负能量。电机回收制动能量的数量与电机再生制动的强度以及再生制动持续的时间有关,强度越大,时间越长,所回收的能量也越多。除此之外,汽车的行驶车速以及电池的SOC值也都是影响能量回收的因素。
仿真结果表明,在一个10-15循环工况中,回收的制动能量为3.56×10的5次方J,总的制动能量为7.28×10的5次方J,整车消耗的总能量为1.58×10的6次方J,制动能量的回收效率为48.91%,总能量回收效率为22.5%。采用四轮轮毂电机驱动时,总能量的回收效率高于20%,比前轮驱动下的总能量回收效率高。
2.停车制动工况仿真:
汽车从行驶到完全制动停止的过程中,汽车的动能通过摩擦制动而转化为热能逐步耗散在空气中。电动汽车使用的是再生液压制动系统,制动过程中有一部分的制动动能可以通过电机转化为电能存储在动力电池中。
动能向电机传输的过程中,有一部分消耗在机械摩擦过程中;电机向动力电池反充电的过程中,还要受到电池的充电电流、充电功率以及电池的SOC值等的限制。所以,只是部分制动动能可以传递到动力电池中。
常见的制动停车可以分为紧急制动停车和缓速制动停车两种。紧急制动停车是在紧急状况下,为了使汽车在较短的时间内停止而采取的制动方式,需求的制动力大,制动时间短,制动强度较大。缓速停车制动是指汽车逐步减慢车速,必要时通过制动使汽车速度逐步减小
直至车辆完全停止的过程,这一过程一般时间较长,制动平缓,制动强度小,是常见的停车方式。
设置停车制动的初始速度为48km/h,完全制动停车的时间分别为2s和10s。通过仿真分析,可以得到2s制动停车的能量回收效率为6.2%,10s制动停车的能量回收效率为25.1%。10s制动停车工况下汽车回收制动能量的能力远远高于2s制动停车工况,这与再生制动强度和再生制动持续的时间有关。对比两种制动停车工况,10s制动停车工况下,整车制动以再生制动为主,摩擦制动为辅,电机再生制动持续时间较长,能量回收效果较好;
2s制动停车工况下,整车的制动以摩擦制动为主,电机再生制动为辅,电机再生制动持续时间较短,能量回收效果一般。