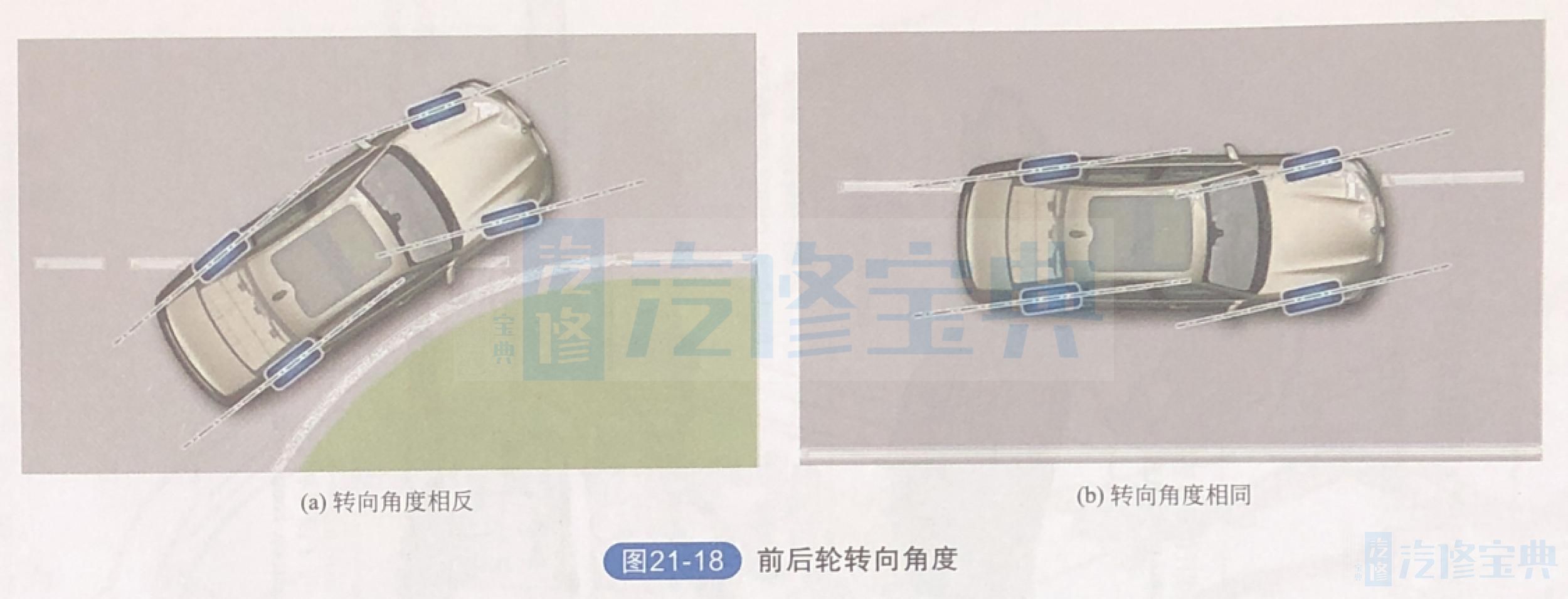
车速<60kmh时,后轮转向角度与前轮转向角度相反。这样可提高车辆的转弯性能,如图21-18(a)所示。 车速≥60km/h时,后轮转向角度与前轮转向角度相同。这样可使车辆保持直线行驶,如图21-18(b)所示。
快速更换车道或转弯时,所有车辆都有明显的横摆趋势且可能导致过度转向。动态稳定控制系统(DSC)识别出驾驶员指令与车辆响应间存在偏差时,就会进行后轮转向干预并稳定车辆,如图21-19所示。


车速<60kmh时,后轮转向角度与前轮转向角度相反。这样可提高车辆的转弯性能,如图21-18(a)所示。 车速≥60km/h时,后轮转向角度与前轮转向角度相同。这样可使车辆保持直线行驶,如图21-18(b)所示。
快速更换车道或转弯时,所有车辆都有明显的横摆趋势且可能导致过度转向。动态稳定控制系统(DSC)识别出驾驶员指令与车辆响应间存在偏差时,就会进行后轮转向干预并稳定车辆,如图21-19所示。

返回顶部