一、自动泊车辅助系统定义。 自动泊车辅助系统( Park Assist,PA)是利用车载传感器探测有效泊车空间并辅助控制车辆完成泊车操作的一种汽车先进驾驶辅助系统,如图7-56所示。
相比于传统的电子辅助功能,比如倒车雷达、倒车影像显示等,自动泊车辅助系统智能化程度更高,减轻了驾驶员的操作负担,有效降低了泊车的事故率。
二、自动泊车辅助系统组成。
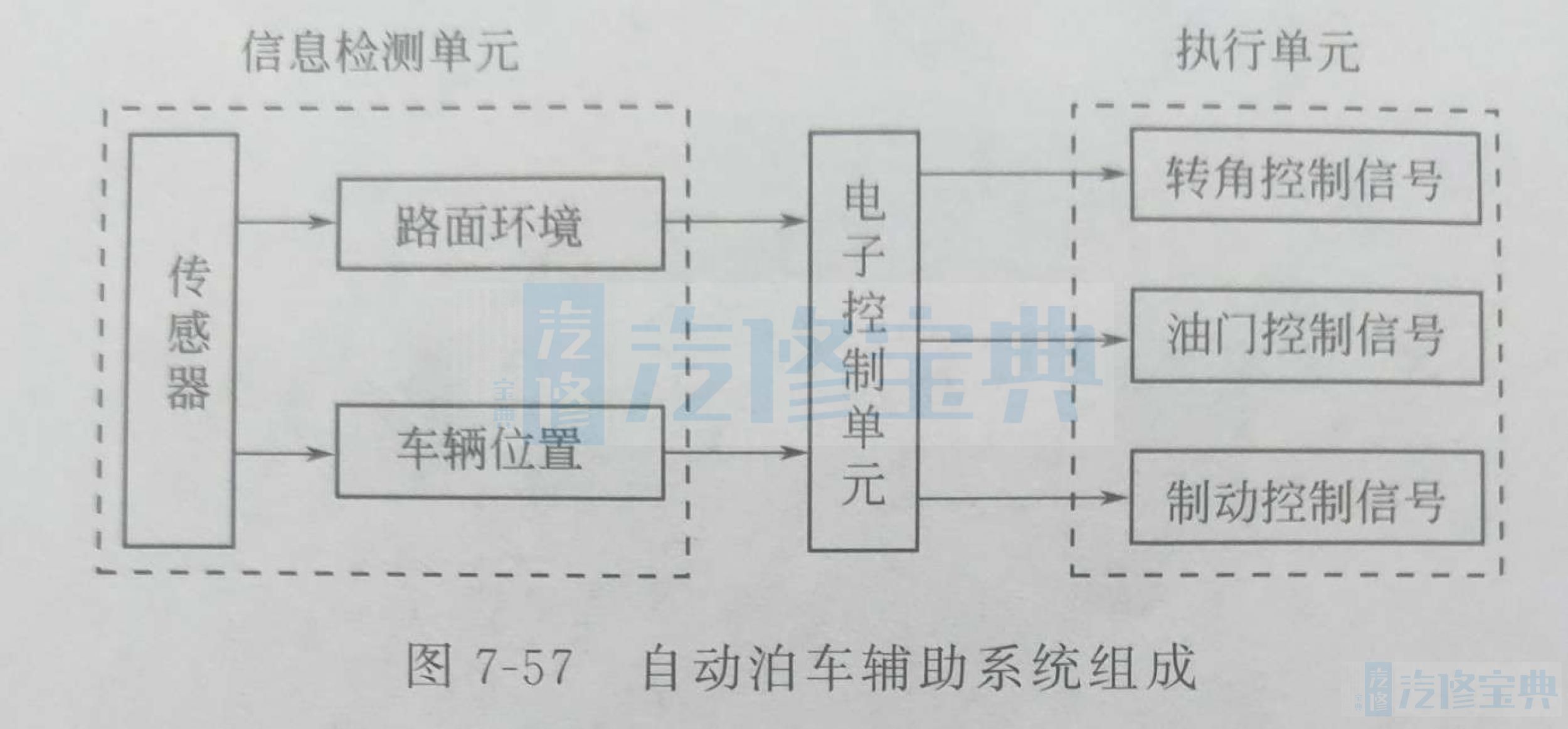
自动泊车辅助系统主要由信息检测单元、电子控制单元和执行单元等组成,如图7-57所示。
(1)信息检测单元信息检测单元是自动泊车系统的耳目,利用摄像头或雷达传感器等对路面环境和车辆位置等进行检测,可采集图像数据及周围物体距车身的距离数据,并通过数据线传输给电子控制单元。
(2)电子控制单元电子控制单元是自动泊车辅助系统的核心,将信息检测单元上传的数据进行分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据这些参数做出自动泊车策略,并将其转换成电信号。
(3)执行单元执行单元接收电子控制单元的指令,精确控制转向盘的转动、油门和刹车的运动,以使汽车能准确跟踪路径,并随时准备接收中断以紧急停车。
三、自动泊车辅助系统原理。
自动泊车辅助系统工作原理是通过车载传感器扫描汽车周围环境,通过对环境区域的分析和建模,搜索有效泊车位,当确定目标车位后,系统提示驾驶员停车并自动启动自动泊车程序,根据所获取的车位大小、位置信息,由程序计算泊车路径,然后自动操纵汽车泊车入位。
从机理上分析,自动泊车辅助系统的运行过程如图7-58所示。
(1)激活系统汽车进入停车区域后缓慢行驶,人工开启自动泊车辅助系统,或者根据车速自动启动自动泊车辅助系统。
(2)车位检测通过车载传感器获取环境信息,传感器主要采用测距传感器如雷达)和视觉传感器(如摄像头),然后识别出目标车位。
(3)路径规划根据所获取的环境信息,电子控制单元对汽车和环境建模,计算出一条能使汽车安全泊入车位的路径。
(4)路径跟踪通过转角、油门和制动的协调控制,使汽车跟踪预先规划的泊车路径,实现轻松泊车入位。
四、全自动泊车技术。
自动泊车辅助系统在泊车过程中,驾驶员需要控制制动踏板、加速踏板及排挡杆,转向盘操作由电脑完成,目前已装备量产车型;全自动泊车技术在泊车过程中,不需要驾驶员控制汽车任何操作,所有泊车过程全部由电脑控制,目前处于试验阶段。
1.奥迪全自动泊车技术。
奥迪全自动泊车技术是通过智能手机上的应用程序“一键自动停车”来完成。当驾驶员将车辆开到停车场的入口附近时,驾驶员下车拿出手机,然后只是简单地点一下屏幕,就转身离去,随后车辆开始自行启动,进入停车场寻找停车位,如图7-59所示。
虽然奥迪确实实现了全自动泊车,但是车辆并不是依靠自己的力量,在演示的场地中布满了激光扫描设备来帮助车辆定位,也就是说只有在与奥迪合作安装了激光扫描设备的停车场,这项技术才能得以真正的使用。
2.沃尔沃全自动泊车技术。
沃尔沃开发的全自动泊车系统是与无人驾驶技术、网络技术与无线通信技术的进一步结合,在基础设施建设方面,沃尔沃全自动泊车系统并不算复杂,只需要在停车场出入口以及停车场内部设置传感器,用于引导车辆进出停车场以及寻找车位。沃尔沃的这项技术,可以让驾驶员不在车内,便可实现车辆的自动泊车和锁闭,并且它还能让车辆自己从泊车位来到驾驶员的身边。这些操作都可以用手机端的自动停车APP,只需轻点按钮,车辆便会自动寻找车位,当车辆完成泊车后,也会在手机上接收到泊车完毕的信息。同样,如果想让车自己来到驾驶员身边,也只需在手机上进行简单操作,如图7-60所示。
沃尔沃的这项技术还可以在自动泊车的过程中实时监测车辆周围的各种障碍物、以便随时调整行车路线。
3.宝马远程代客泊车技术。
远程代客泊车技术是在360°防碰撞系统的基础上,借助其激光扫描仪获得的数据,实现车辆自动泊车。驾驶员只需将车辆开到停车场入口处,即可通过智能手表启动远程代客泊车系统,如图7-61所示。
在车辆进行自动泊车的过程中,系统可以自动识别周围物体,避开意外出现的障碍物,比如行人、其他车辆以及未完全入位的车辆。
相比沃尔沃的全自动泊车技术,由于宝马借助了360°防碰撞系统的激光扫描仪,而减少了对于GPS卫星定位系统的依赖,使得该系统的使用范围不仅局限于无遮蔽的露天停车场。即便是地下停车场或立体停车场,搭载这项技术的宝马车型都可以畅通无阻。除了配备激光扫描仪之外,这款试验用车还配备了处理系统与运算系统,这意味着车辆可以独立完成楼内定位、监测周围环境、并进行独立的自动导航。这样,停车场便不需要配备自动驾驶所需要的复杂基础设施。
全自动泊车技术是实现汽车无人驾驶的重要环节,目前还处于试验阶段,真正达到全自动泊车的应用,还有很多技术需要解决完善。
五、自动泊车辅助系统应用实例。
雪佛兰科鲁兹配备了自动泊车辅助系统可以实现水平和垂直两种方式的自动泊车,如图7-62所示。在泊车人位过程中,驾驶员仅需要控制制动踏板、加速踏板及排挡杆,转向盘操作由电脑完成,帮助驾驶员准确将车停到指定位置,方便驾驶员操控车辆。
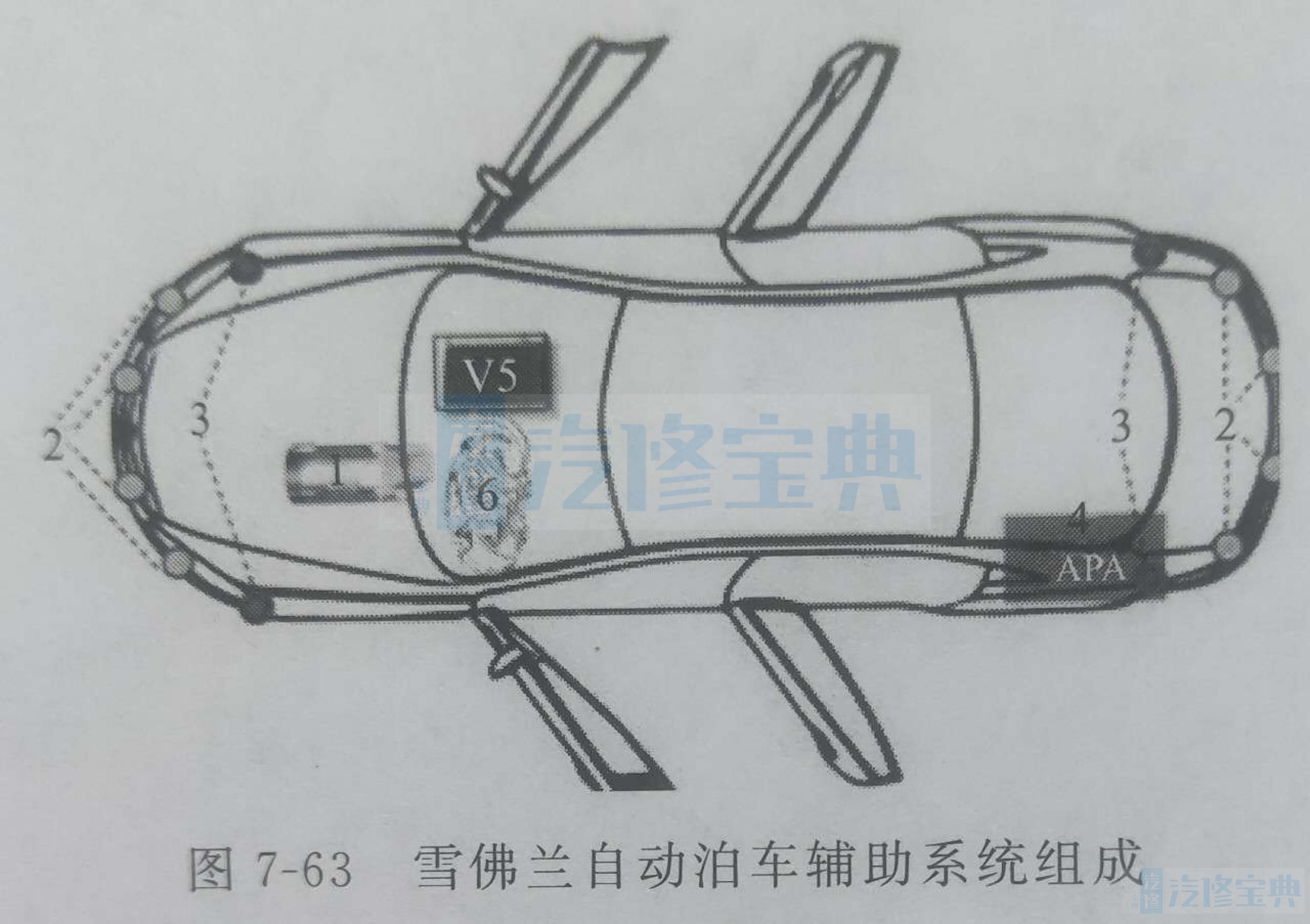
该自动泊车辅助系统组成如图7-63所示,图中1代表带自动转向功能的电动转向机:2代表8个驻车辅助传感器(UPA),用于测量泊车过程中与障碍物的距离,探测距离为1.5m;3代表4个泊车辅助传感器(APA),用于测量寻车过程中车位的长短,探测距离为1.5m;4代表APA模块,位于后备厢左侧衬板内,是驻车辅助、自动泊车辅助、侧盲区报警功能的主控模块,此模块在底盘拓展网络和低速网络上通信,向电动转向、仪表、收音机等模块发送控制指令和信息;5代表启用/关闭按钮,共有2个,分别打开和关闭UPA和APA功能;6代表仪表。
自动泊车辅助系统控制框图如图7-64所示,图中实线表示专线信号,虚线表示网络信号。系统进入工作状态时,通过APA传感器监测与路边车辆的相对位置来搜索车位。搜索到合适的车位以后,APA模块通过仪表和收音机扬声器向驾驶员提示停车并挂入倒挡。驾驶员按指令操作后,APA模块向EPS(电动助力转向)模块发出转向控制指令,并通过持续的APA和UPA传感器信号来判定车辆实际位置,通过仪表向驾驶员发出指示,直到完全停车入位。
自动泊车辅助系统水平泊车时,参照车辆与本车的距离应控制在0.3-1.5m范围内,最小车位长度为车身长度加0.8m,最大车位长度为12m;垂直泊车时,参照车辆与本车的距离应控制在0.3-1.5m范围内,最小车位宽度为车身宽度加0.8m,最大车位宽度为12m。
自动泊车操作步骤如下。
①在车辆处于D挡时,按下自动泊车系统开关。
②按下开关后,系统默认寻找右侧水平泊车车位。
③驾驶车辆以低于30km/h的速度驶过停车位。
④系统找到车位后,在驾驶员信息中心提示停车。
⑤踩下制动踏板,挂入R挡,转向盘振动,表明自动泊车系统已进入工作。
⑥按驾驶员信息中心提示信息停车或换挡,直到显示泊车成功。
⑦如需要垂直泊车,需要长按泊车系统开关来激活。
自动泊车辅助系统都不是全自动的,驾驶员必须踩制动踏板控制车速,时刻盯紧汽车的倒车雷达显示屏和左右后视镜。自动泊车辅助系统必将向全自动泊车系统发展,全自动泊车是实现无人驾驶汽车关键技术之一。