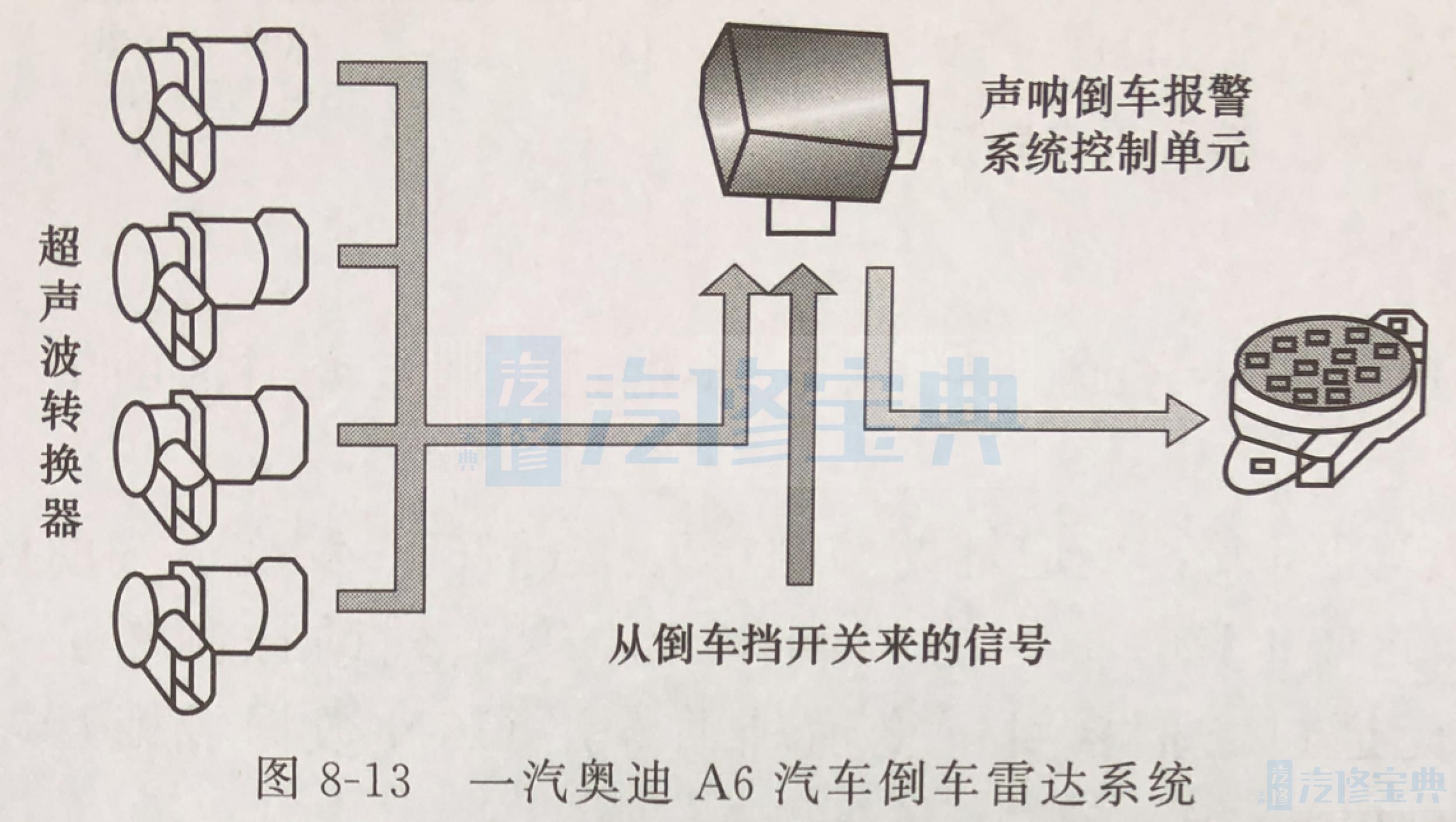
1.倒车雷达电路。 倒车雷达系统也叫驻车/泊车辅助系统,在目前生产的汽车上配置很普遍,据其功能不同一般有只提供倒车距离报警信息和同时提供倒车影像信息两种,如导航系统中综合的倒车影像系统便是后者。这里主要介绍大多数汽车装用的普通倒车雷达。 汽车倒车安全装置有声呐(超声波)倒车安全装置和雷达倒车安全装置之分。因雷达安全倒车装置造价高,所以目前多用声呐倒车装置。 (1)系统组成 以奥迪A6汽车为例,倒车安全报警系统有4个声呐传感器,均匀分布安装于汽车后保险杠上未喷漆的部位内(图8-13)。声呐传感器既是执行元件又是传感器,既发射信号,也接收信号。控制单元向4个传感器发出4个命令,传感器既发出超声波,同时又接收超声波的回波。 在声呐传感器内,回波信号被转换成数字信号,并将其传递到控制单元,控制单元根据回波的传播时间计算出与障碍物的距离。声呐传感器由个无线电收发单元和一个整理器构成,整理器将回波信号转换成数字信号传递给控制单元。 (2)工作原理。 ①当挂入倒车挡时,倒车安全警报系统即开始工作,发出“嘟嘟”的声音表明该系统状态良好。 当车与障碍物相距1.6m时,可听见间歇警报声。离障碍物越近,声音越急促。如距离小于0.2m时,则连续发出警报声。警报声音间隔及音量用故障诊断仪可设定。
2.倒车影像系统。
倒车影像系统主要是由显示器以及远红外线广角摄像装置两部分组成的。这套系统的原理其实也并不复杂,就是把一个倒车摄像头装在车的尾部,然后当驾驶者挂倒挡的时候,系统就会自动把显示器与后部的摄像头连接起来,然后摄像头拍到的影像就会传输到显示屏当中,驾驶者便能看到车后方实时影像了。而且系统是采用红外线摄像头装置,因此即使是在晚上也能看得一清二楚。
3.全景环视影像系统。
全景环视影像系统摄取车辆四周景物并通过控制器将四周景物合成一幅360°的全景图显示效果类似从车辆上空俯拍的影像。全景环视影像可以和四个摄像头中任意一个摄像头摄取的影像同时显示。由控制主机完成图像处理,将处理后的视频信号发送至LCD显示全景环视影像系统主要有泊车辅助功能和引导线功能。泊车辅助分为平行泊车模式和垂直泊车模式2种,平时遇到的各种泊车情景基本都包含在这2类中,而且系统还加入了详细的操作步骤,触摸“HELP键即可查看泊车辅助的帮助信息。引导线随方向盘转动而变化,能准确显示出倒车时车尾的轨迹,可以有效辅助驾驶员倒车入库、侧方位停车等。
全景环视影像系统主要由4个环视摄像机、泊车辅助系统(PAS)开关、全景环视影像控制模块(AVM)及多媒体显示屏等部件组成。
4.自动泊车系统。
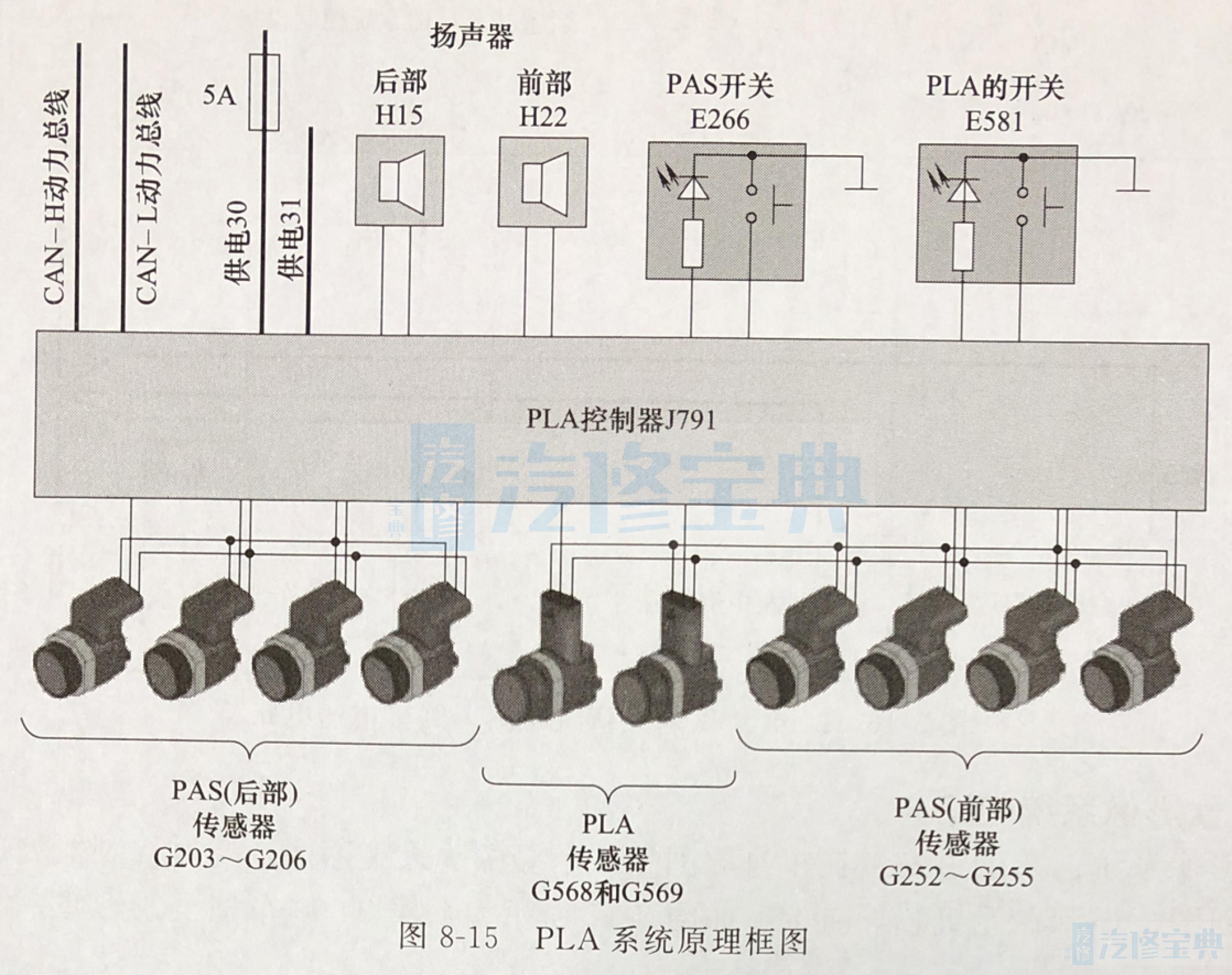
以大众车型为例,大众PLA停车辅助系统是PDC驻车辅助装置的升级版,PLA停车辅助系统控制单元处理来自侧面超声波传感器、ESP系统和转向角传感器的信息。基于这些数据,PLA控制单元计算出停车位置的参数,并通过仪表显示器告知驾驶员一个合适的停车位。同时PLA控制单元确定适当的停车路线。计算完路线后的行驶中,电动机械式转向助力器转动前车轮。PLA控制单元确定方向盘转动角度。
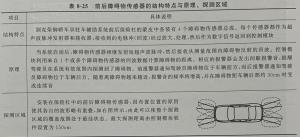
在导航显示屏上,车辆周围的空间分为8个区域(4个在车辆前方和4个在后方)。在后部中央位置的2个传感器检测距离为160cm,前部中央位置的2个传感器检测距离为120cm。在车辆前后部另外的4个传感器可检测的距离为60cm。
装于右后侧的蜂鸣器,提示车辆后方出现的障碍物。驾驶员听到从车后方传来的警报声后,会意识到接近的障碍物在车辆后方。位于仪表后面左侧的蜂鸣器也是同样的道理。PLA系统组成部件如图8-14所示,系统原理框图如图8-15所示。