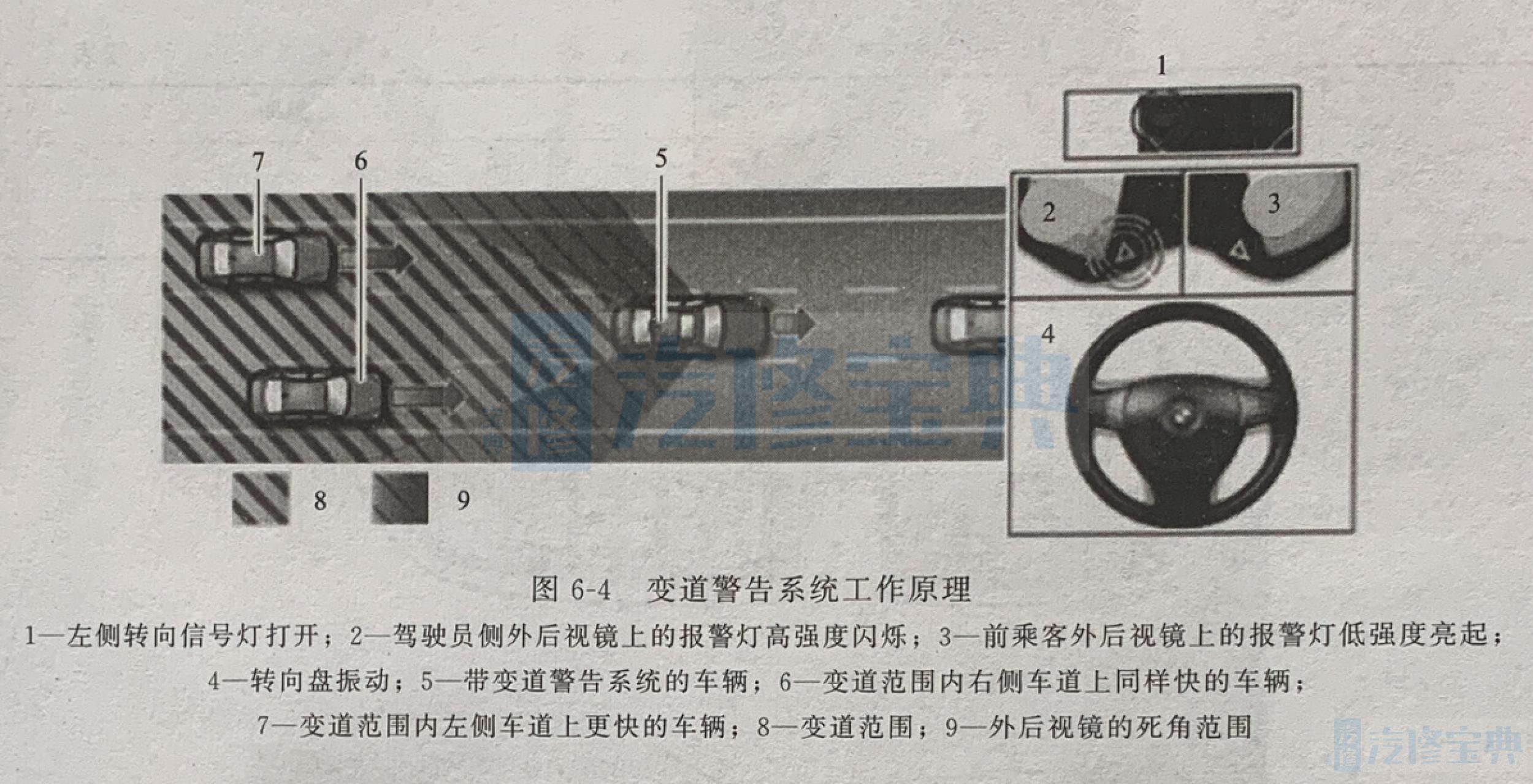
变道警告系统(SWW)是一个全新的辅助系统,可以作为特种装备SA5AG购买。 SWW在换道时给驾驶员提供帮助。SWW在速度大于50km/h时告知驾驶员在换道时可能出现的碰撞。为此,SWW借助两个雷达传感器监控车后和侧面的交通情况变道警告系统具有下列优点。 SWW可以识别在换道时可能产生危险的交通状况,然后分两挡(外后视镜上的报警灯、转向盘振动)向驾驶员提示和报警。 例如当远处的车辆从后面快速靠近时,就存在这类交通状况。驾驶员,尤其是在黑夜中或恶劣天气条件下,很难评估这些状况。雷达传感器的工作不受天气以及光线条件影响。 当其他车辆处在死角位置时,可能产生另外一种危险。只有当驾驶员特别谨慎时,才能识别这种危险。SWW的雷达传感器能够识别本车后方60m以内的其他车辆。位于邻近行驶轨迹上的车辆在不超过本车中间位置时都能被识别到。 图6-4所示为变道警告系统工作原理。 下面简要介绍SWW的部件:SWW主控制单元;变道警告系统副控制单元;驾驶员辅助系统操作面板;外后视镜上的报警灯;转向盘中的振动执行器。 SWW的主控制单元是一个雷达传感器,同时也是一个控制单元。该控制单元安装在右后方、保险杠支架上部。雷达传感器从外部看不到,被保险杠遮盖着。 只有右边的雷达传感器具有一个控制单元地址以及一个用于诊断的地址。因此,只有右边的雷达传感器上有一个控制单元。
该雷达传感器用于产生并发送雷达电波。雷达电波是聚集的电磁波。在雷达传感器中集成了一个接收模块。如果雷达电波遇到障碍物,则会反射该障碍物,雷达传感器重新接收到反射波。通过相互连接多次测量即可计算出距离和速度。发送和接收通过平面天线进行。
雷达传感器的支架不能进行机械调整。不是对雷达传感器进行机械调整(例如主动速度调节传感器),而是必须通过诊断存储修正角。
变道警告系统副控制单元只是雷达传感器,不是控制单元。但这个雷达传感器有一个可编程的存储器和一个专用处理器。变道警告系统副控制单元通过局部控制器区域网络与SWW主控制单元连接。此雷达传感器安装在左后方,在保险杠支架上方。雷达传感器从外部看不到,被保险杠遮盖着。
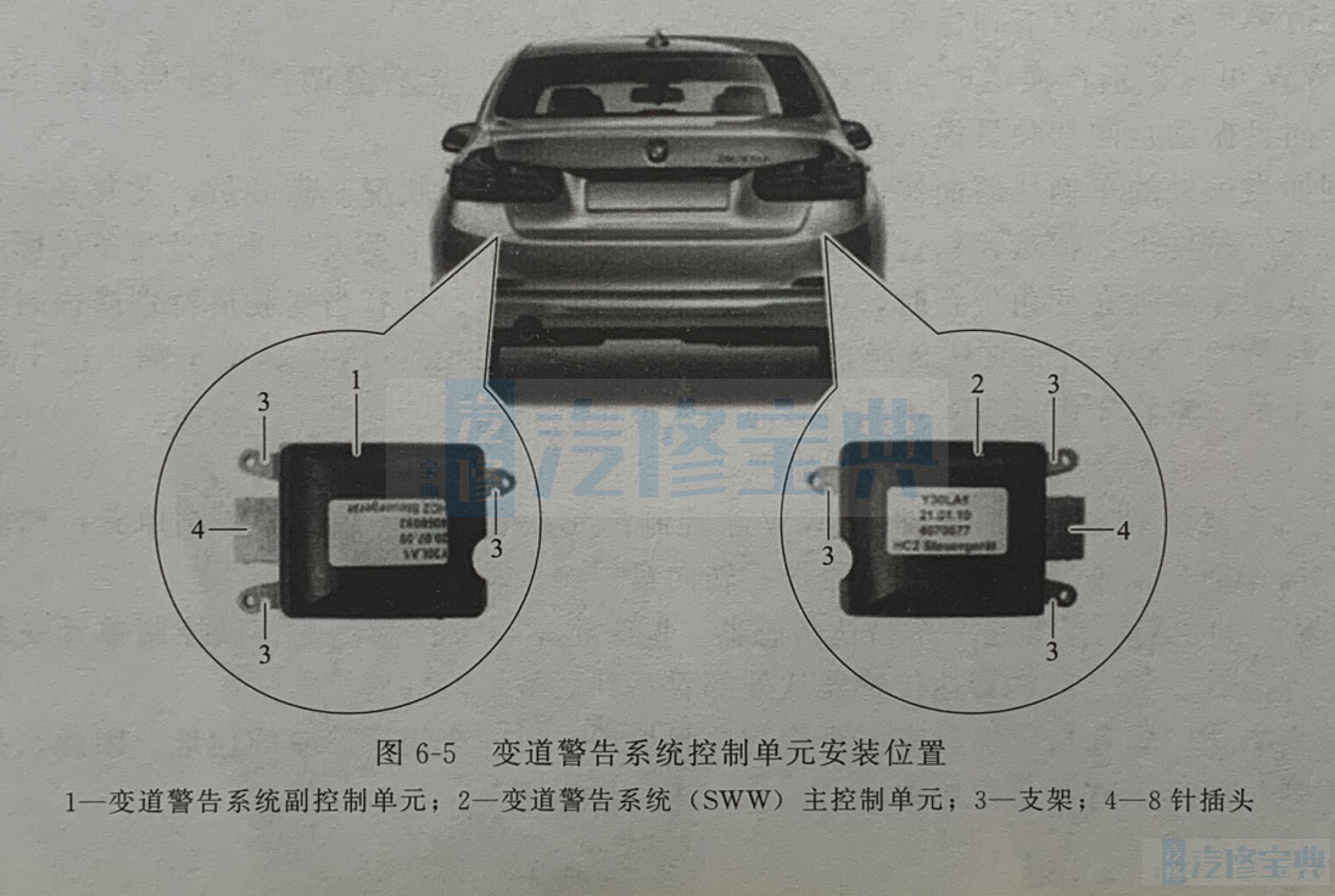
雷达传感器由于其固定点各不相同,因此不能混淆。变道警告系统控制单元安装位置如图6-5所示。
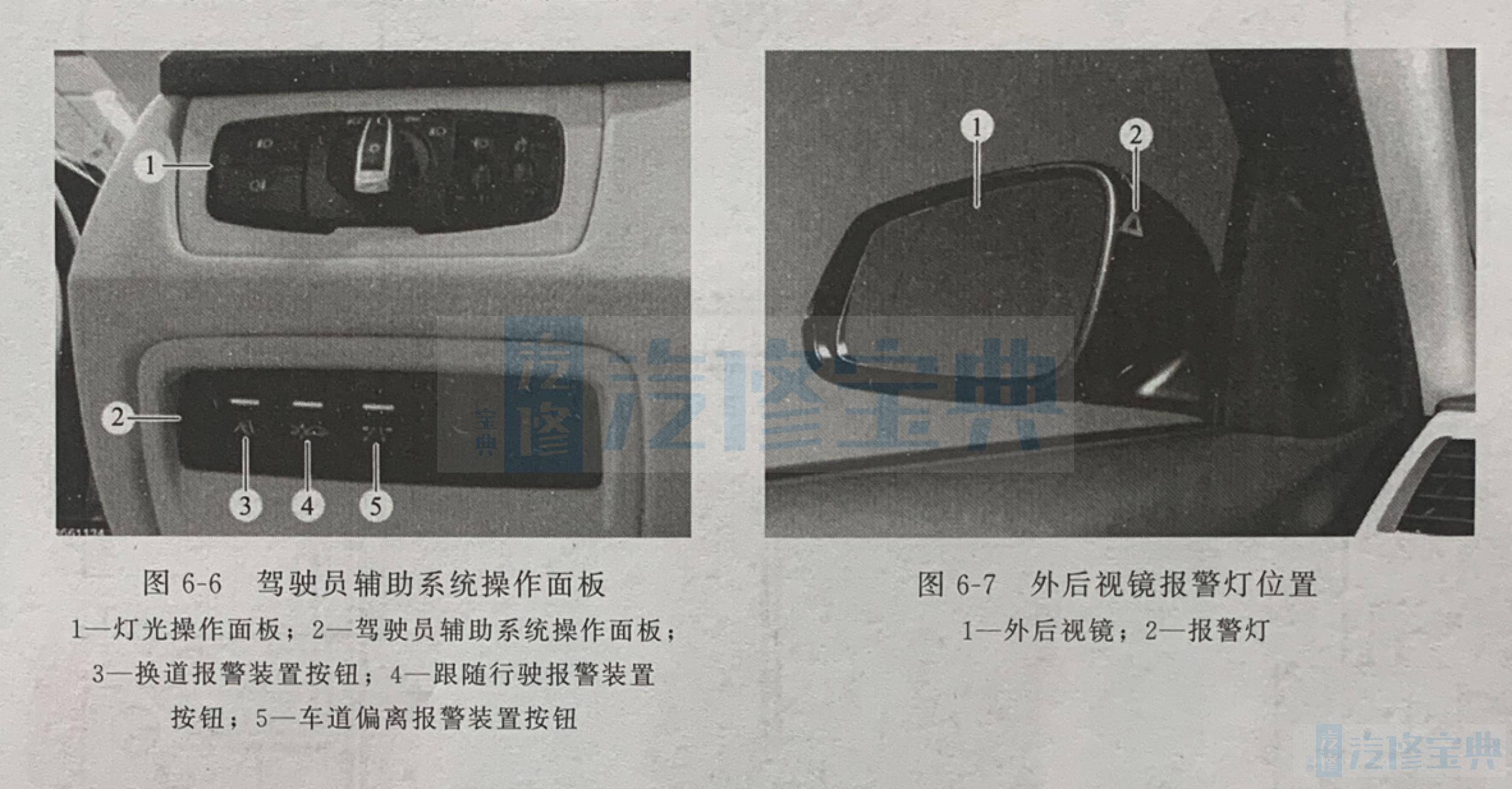
使用驾驶员辅助系统操作面板中的按钮3(图6-6)打开和关闭SWW。SWW打开时,
按钮上方的绿色功能照明灯亮起。功能的开关状态在关闭总线端K1.15后存储在使用的车辆钥匙(个性化)中。
操作设备通过局域互联网总线与FEM(前部车身电子模块)连接。一个从FEM发送到ICM(一体式底盘管理系统)控制单元的总线信号通报按钮操作情况。只有当系统无故障工作时,ICM才允许打开SWW。然后才会通过一个总线信号向FEM发送正面确认信息,激活按钮的功能照明灯。如果系统中存在故障,则在按下按钮后,功能照明灯仍会保持关闭。驾驶员于是识别到,SWW不可用。
如果在打开转向信号灯时后面一部车辆处在临界范围内,则后视镜外壳上的报警灯闪烁(不同的强度)。外后视镜报警灯位置如图6-7所示。
在左侧和右侧外后视镜上各有一个三角形的报警灯。这些报警灯可用不同强度进行控制。如果雷达传感器识别到一辆车,则会将一个信号发送给前FEM。ICM利用有关行驶状态和转向角的信号计算要求和必需的强度。此要求通过局域互联网总线由ZGW(中央网关模块)转发到相应外后视镜的电子装置。按脉冲宽度调制的控制使报警灯的发光二极管亮起。
SWW在速度超过大约50km/h时输出一个警告。
如果在打开转向信号灯时后面一部车辆处在临界范围内,则转向盘振动。振动执行器置于转向盘的辐条内,如图6-8所示。振动执行器的任务是令转向盘振动。车道偏离报警装置辅助系统和SWW均利用该振动警告驾驶员危险情况。
同样,安装在转向盘内的转向盘电子控制装置控制振动执行器。如果雷达传感器识别到一辆车,会将一个信号发送给FEM。ICM利用有关行驶状态和转向角的信号计算要求和必需的振动强度。控制振动执行器的指令由ZGM通过 FlexRay发送至转向柱开关中心。转向柱开关中心通过LIN总线将这种要求继续传递至转向盘电子控制装置。
除了SWW外,车道偏离报警装置( KAFAS控制单元)也使用振动执行器产生警告驾驶员的信号。这时,这些系统将使用不同的振动振幅。振动执行器的控制协调集成在ICM中。
为了实现SWW,需要一个连接有分散在其他控制单元中的功能的复杂系统网络。图6-9所示为变道警告系统控制网络。
两个变道警告系统雷达传感器(主控制单元和副控制单元)在其相应的感知范围内相互独立地执行该功能。首先沿纵向和横向确定探测到的交通参与者的位置。
在此基础上为交通参与者分配一个车道。这时区分本车车道、左或右相邻车道和更远的车道。如果交通参与者位于“变道范围”内,则也探测与本车的接近速度。如果某个交通参与者位于死角范围内,则只需识别到即可。准确位置或速度对于警告来说不重要。
警告必要性由SWW主控制单元确定。该主控制单元此时既利用自己确定的有关交通参
与者的数据,也利用变道警告系统副控制单元的数据。
根据距离(沿纵向)和接近速度可计算出取消变道之前的剩余时间。如果该时间对于至少一个探测到的交通参与者来说低于某个阈值,则会决定发出警告。死角中识别到交通参与者时会立即发出警告。
如果SWW(主控制单元)从AHM(挂车模块)接收到拖有挂车的信息,则会抑制警告。挂车车身会很大程度地限制雷达传感器的感知范围。
SWW(主控制单元)将是否具有警告必要性的结果发送给ICM。
通过相应外后视镜中的报警灯或者转向盘振动来输出警告。
如果有车辆位于本车周围的临界范围内,或者从后面靠近,则外后视镜中的报警灯会亮起。
如果操作了转向信号灯,同时在临界范围内识别到车辆,则转向盘会振动,且报警灯闪烁。
如果取消转向信号灯操作,或者其他车辆离开临界范围,则会撤销警告。
此系统不能取代个人对交通状况的判断。
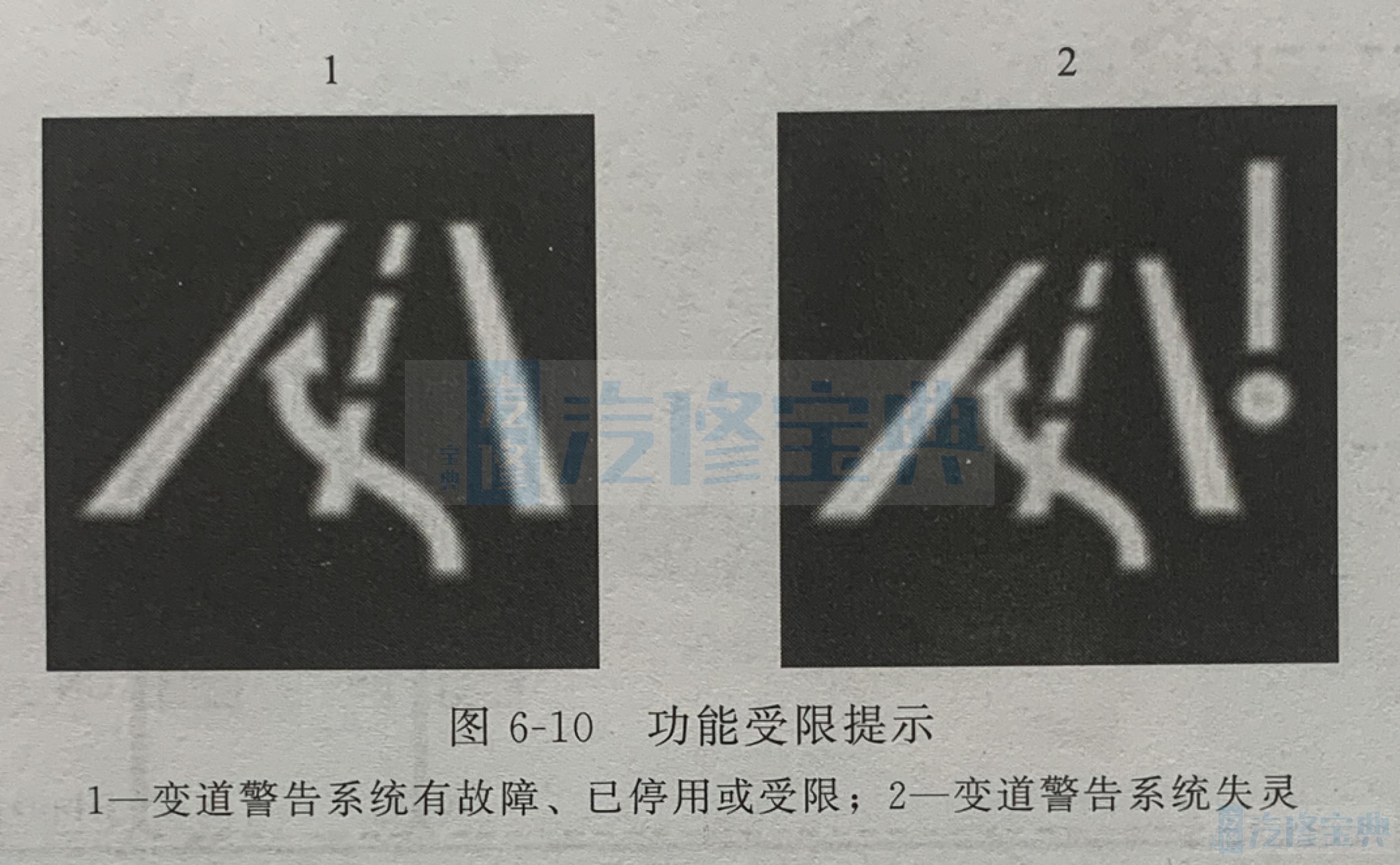
在下列典型情况下,SWW的功能可能受限:急转弯或车道狭窄;暴雨或降雪;保险杠脏污或结冰;保险杠上粘贴有标签;带挂车行驶;靠近车辆车速相当快。
SWW功能受限时会显示一条检查控制信息,如图6-10所示。
不需要校准变道警告系统的雷达传感器。在更换某个雷达传感器或操作其固定件后必须执行一次服务功能。因此,将修正角存储在变道警告系统雷达传感器中。
通过诊断系统可以提供下列用于SWW的服务功能:SWW传感器的调试。
路径:服务功能>驾驶员辅助系统>变道警告系统。