

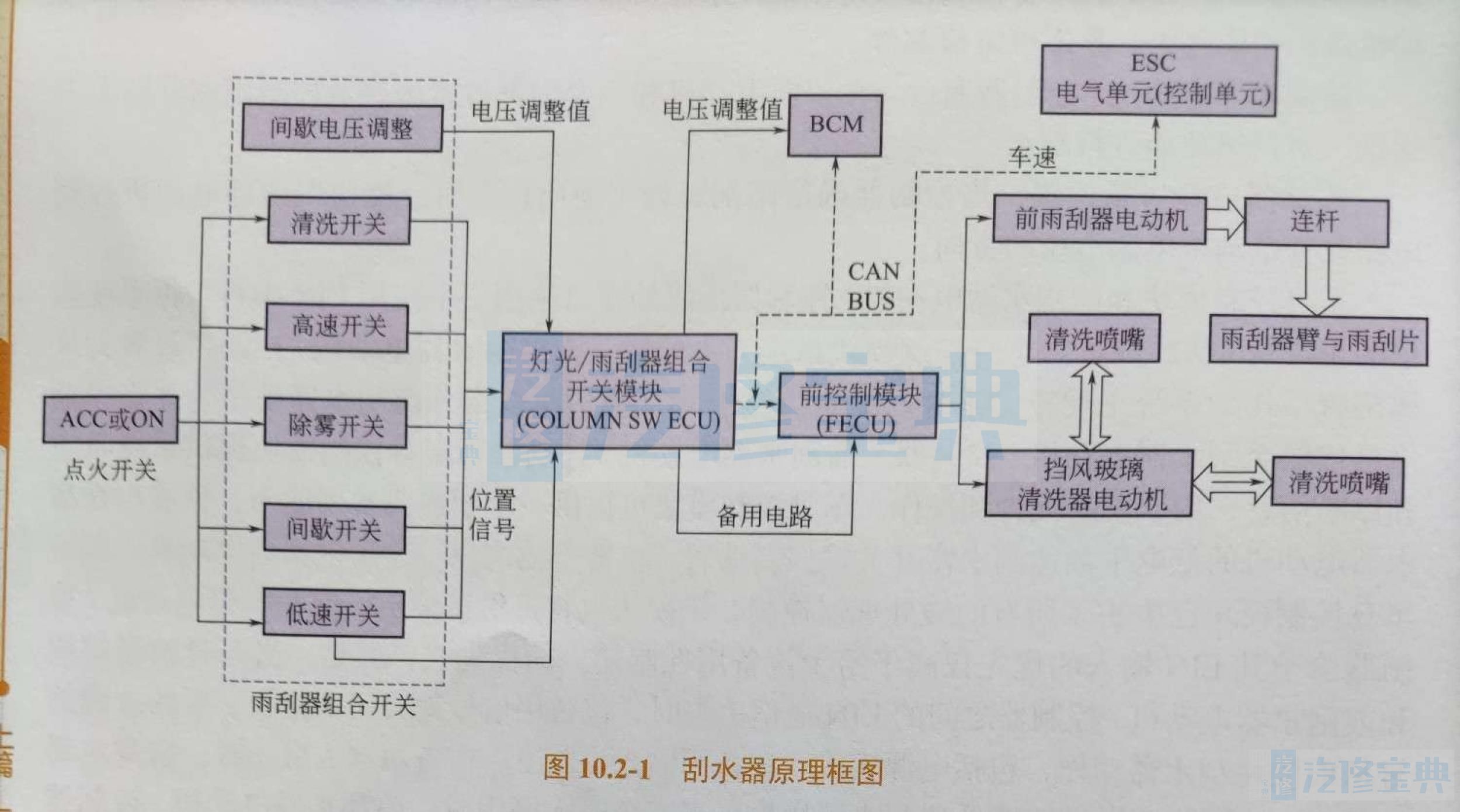
在配备了“智能刮水器系统”的车辆上,车身控制模块(BCM)通过局域互联网络(LIN)串行数据通信指令前窗刮水器操作来取代通过“ ON/OFF(开启/关闭)”或者“ HIGH/LOW(高速/低速)”刮水器电动机继电器驱动输出。在使用单配置智能刮水器系统的前刮水器系统上,驾驶员侧和乘客侧雨刮臂通过机械连杆与一个集成前刮水器电动机/控制器相连,由该电动机/控制器对雨刮臂进行操作。前刮水器电动机/控制器具有必要的电子装置、电动机和位置传感器,以执行车身控制模块发出的刮水器指令。这些内部电子装置集成在刮水器电动机齿轮壳体盖中,是不可维修部件。 前刮水器电动机/控制器通过一个双向电动机和一个内部位置传感器控制雨刮臂的上下运动,对挡风玻璃进行刮水。 传感器追踪齿轮位置,当控制器确定雨刮臂处于逆向位置时,就使用内部电动机控制电路改变电动机电源电压的方向。 车身控制模块和前刮水器电动机/控制器之间的接口采用一个使用LIN串行数据系统通信的主模块/从属配置。车身控制模块指定为主配置,前窗刮水器电动机/控制器设置为从属配置。作为系统主配置,车身控制模块使用LN通信总线指令前刮水器动作,并将车辆信息传输至刮水器电动机/控制器。前刮水器电动机/控制器为车身控制模块提供系统状态和诊断信息,用于诊断报告和操作。车身控制模块也提供一个硬连线备用输出,该输出在刮水器电动机的低电平高速刮水器开关输入启动后,将蓄电池电源接通至刮水器电动机。即使车身控制模块已失去了所有的微处理器控制,该模块也将提供该输出。前刮水器电动机/控制器给予其LIN输入的优先权高于给予该备用控制输入的优先权,但是,当车身控制模块和前刮水器电动机/控制器之间的LIN通信丢失时,该备用信号就会用来指令必要的故障信号从而弱化刮水器动作,包括电源模式。在备用输入控制下,在备用输入启动时,前刮水器电动机/控制器应提供持续低速刮水器操作;当冗余输入停用时,前刮水器电动机/控制器停止刮水器并进入“低电源模式。 前刮水器开关保持在“MIsT(除雾)”位置(瞬时接触开关)或“LOW(低速)”位置(锁止开关)时,车身控制模块通过设置传输到“低速刮水”的LN信号指令进行不间断“低速刮水器”动作,以提供持续“低速刮水器”运作。 车身控制模块应指令“智能刮水器系统”执行如下间歇刮水操作。 ①通过发送一个局域互联网信号设置为“低速刮水”,执行一次即时刮水。前刮水器电动机/控制器将启动“低速刮水器”操作,并发回一个设置为“低速刮水”的LIN信号。 ②刮水器一离开“停止”位置,前窗刮水器电动机/控制器将发送一个局域互联网信号表示刮水器不再处于停止位置。 ③车身控制模块一旦接收到刮水器离开“停止”位置的局域互联网信号后,应将前窗刮水器局域互联网信号指令转变为“停止”。在智能刮水器系统将刮水器移到刮水器停止位置的过程中,智能刮水器应将其“前窗刮水器状态”的局域互联网信号值设置为“停止中”。 ④当前刮水循环将完成时,刮水器将停止。停止刮水器后,智能刮水器系统立即发送设置为“已停止”的“前窗刮水器状态”局域互联网信号。 ⑤在LIN信号从“停止中”转变为“已停止”后,车身控制模块立即将刮水器暂停在其停止位置(停止时间与当前间歇延迟时间间隔开关的设置有关),然后重复该过程。 如前所述,刮水延迟时间间隔是“间歇延迟时间间隔开关”设置的一个功能。在启动后作为车速的一个功能,具有车速特性的间歇功能影响所有的5个正常间歇延迟时间间隔。在车速较快时,“延迟时间间隔”应偏向于较短的延迟时段;在车速较慢时,“延迟时间间隔应偏向于较长的延迟时段。 刮水器原理框图如图10.2-1所示。






返回顶部