通过对各种控制策略的分析,恒功率模式具有较高的工作效率,而功率跟随模式具有更好的燃料经济性和动力性,因此在不同的车辆运行模式下,分别选择更加适合当前功率的控制策略,两者之间进行切换,会使两种控制策略的优势得
以充分发挥。
增程模式下的控制策略是将恒功率定点控制策略和最佳燃料消耗曲线的功率跟随控制策略结合起来使用,充分利用增程器和动力电池的相对高效工作区域,当车辆行驶需求功率高于一定值的时候,采用功率跟随模式的控制策略,避免动力电池的频繁启停和过放电;当车辆行驶需求功率较小时,则根据SOC值划分出不同的工作模式。
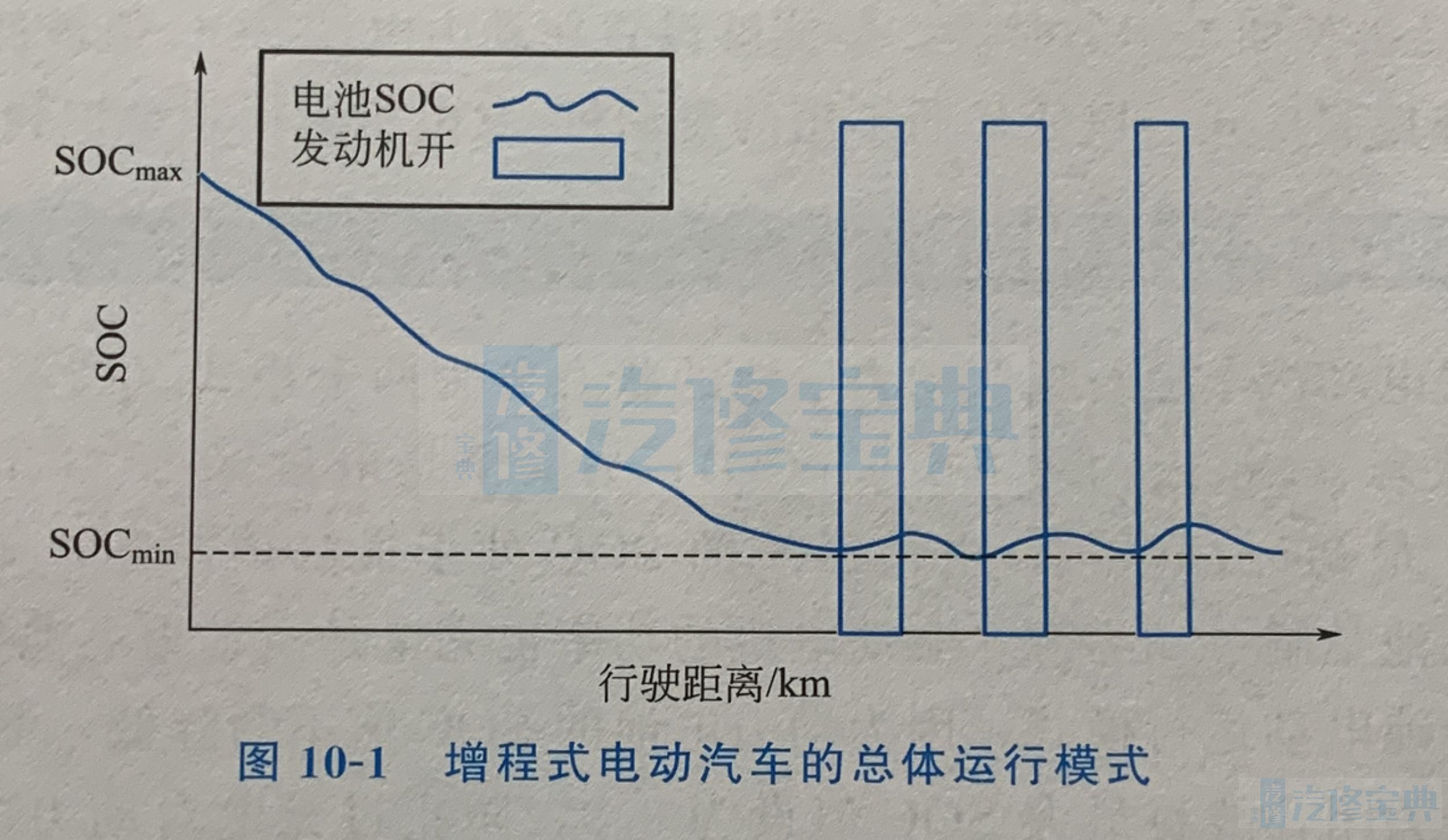
设定SOC阈值作为纯电动模式和增程模式的切换点。当汽车运行在增程模式下,发电机为动力电池充电,使电池SOC值升高,在未达到SOC最高值时,不会启用纯电动运行模式,而是将多余的电量储存在动力电池中,直到SOC达到最高限值后,发动机将再次关闭,汽车再次进入纯电动运行模式。增程式电动汽车的总体运行模式如图10-1所示,图中纵坐标分别为动力电池的SOC值和发动机开启或者关闭的状态。
一、增程式电动汽车控制策略要求增程式电动汽车主要利用电能为驱动能源,增加一个发动机/发电机组作为增程器,在动力电池的SOC值达到阈值时,启动增程器,在最佳的状况下工作,多余的电能用来为动力电池充电,具有低排放甚至零排放的特点,当车辆运行在日常的城市上下班道路上的时候,几乎不需要启动发动机,电能足够满足驾驶者的出行需求。因此,增程式电动汽车的控制策略可以分为两部分部分与纯电动汽车一样,为以纯电动方式行驶时候的控制策略;另一部分是增程模式下的控制策略,此时的控制策略要最大限度地降低能量转化带来的能量损耗,在保证动力性的前提下,达到燃料经济性最佳的目标,提高能量利用率,同时兼顾动力电池的充放电和循环使用寿命,提高整车的工作效率。
为了使两种能源得到最佳的组合和协调运行,应在保证动力性前提下,使燃料经济性最好以及排放最低,故应采用合适的能源管理控制策略。在汽车行驶过
程中,工况是多变和不可预测的,因此控制策略应可以根据不同的路况以及车辆的运行需求,适时、合理地分配其能量流及做出合理的反应。对增程式电动汽车控制策略具有以下要求。
①纯电动模式和增程模式的切换控制要合理,充分利用动力电池驱动,实现零排放。
②防止对动力电池的过充电和过放电,避免频繁地充放电,延长动力电池的使用寿命。
③在启动增程模式下运行后,发动机的启停控制要合理。当发动机为动力电池充电电量达到一定值的时候,才可关闭发动机/发电机组,继续用电能驱动,这样能量多级转化的损失非常大。但是如果发动机启动后提供给动力电池的电量比较小,就切换到纯电动运行模式,则需要频繁地启动发动机,发动机的寿命必然受到影响,也不利于降低排放的设计要求。
④发动机长期不用的时候,要能够设置在动力电池SOC值最低的时候也能运行的特殊控制模式,以使长期不用的发动机/发电机组得到维护和保养。
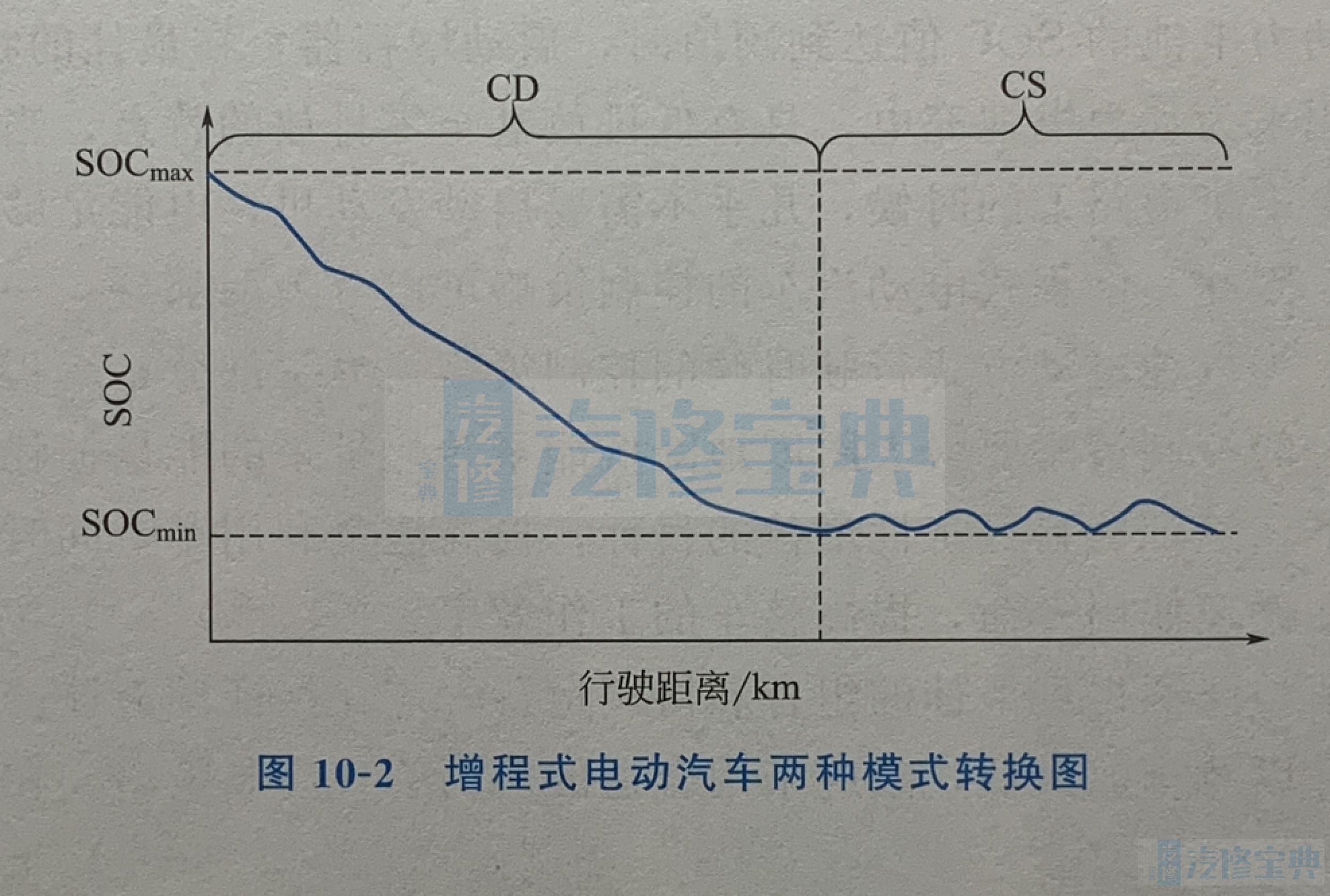
二、纯电驱动模式控制策略增程式电动汽车运行按照动力电池的状态分为两个模式(图10-2):一个是电量消耗状态( Charge-Depleting,CD);另一个是电量保持( Charge-Sustain,CS)状态。最初运行时刻,电池系统的SOC处于最高值状态,车辆运行过程中,动力电池是唯一动力源,驱动电机的功率也完全是由动力电池提供的,故该状态又称为纯电动运行模式,因为动力电池的SOC值不断降低,而发动机/发电机组又完全关闭,故将最大SOC值设为0.9,防止过充电对动力电池造成的损害。当动力电池的SOC值降低到阈值时,发动机/发电机组开始工作,此时切换到电量保持CS阶段,此阶段的SOC值并不是一个固定的值,而是在某一个SOC范围内。
为了有效防止对动力电池过充电和过放电,应设置动力电池SOC的最高值和最低值。
CD模式代表动力电池电能耗尽后的增程运行模式,该模式下发动机/发电机组产生的能量若有剩余,则会为动力电池提供电量,使动力电池处于充电状态,故在CD模式下动力电池的SOC是一个变化值,考虑到应防止动力电池频繁充放电,所以该模式下的转换判断图应
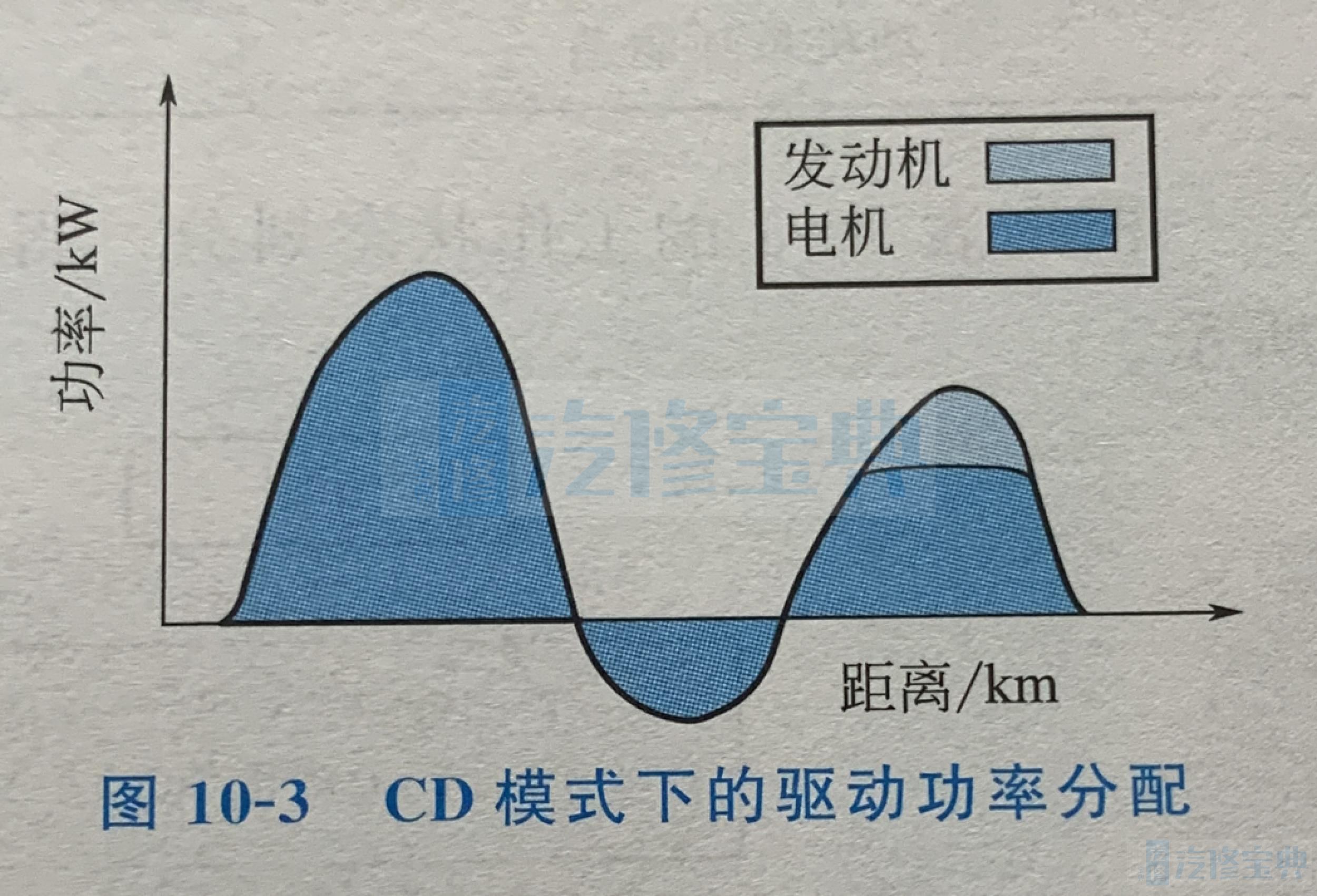
是单向起作用。如图10-3所示,在CD模式下,发动机/发电机组为动力电池充电SOC值达到最高值时,发动机关闭,转为纯电动行驶,此时仍为CD模式,而一旦SOC值小于最低值,系统进入CS模式后,控制系统则不应回到CD模式下。在CD模式下,当需求功率小于等于0时,
设置为制动能量回收模式,将一部分能量再回馈给动力电池,CD模式下的驱动功率分配如图10-3所示,横坐标以上区域是动力电池为车辆提供行驶驱动功率,横坐标以下区域是制动时候的制动能量回收模式。
三、增程模式控制策略汽车在纯电动模式下运行,动力电池的SOC降低到阈值时,增程器开启进入增程模式运行,在功率跟随模式下,发动机工作在最低燃料消耗率区域。此时包括两条能量传递路线:第一条为发动机→发电机→传动系统→驱动电机;第二条为发动机→发电机→动力电池→驱动电机。第二条路线由于在动力电池处多了一次能量转化,其能量利用率要低于第一条。但从整车运行工况来看,如果只采用第一条能量传递路线,所对应的发动机运行状态与传统发动机一样,能量利用率非常低。所以应根据不同的工况选取不同的能量传递路线。
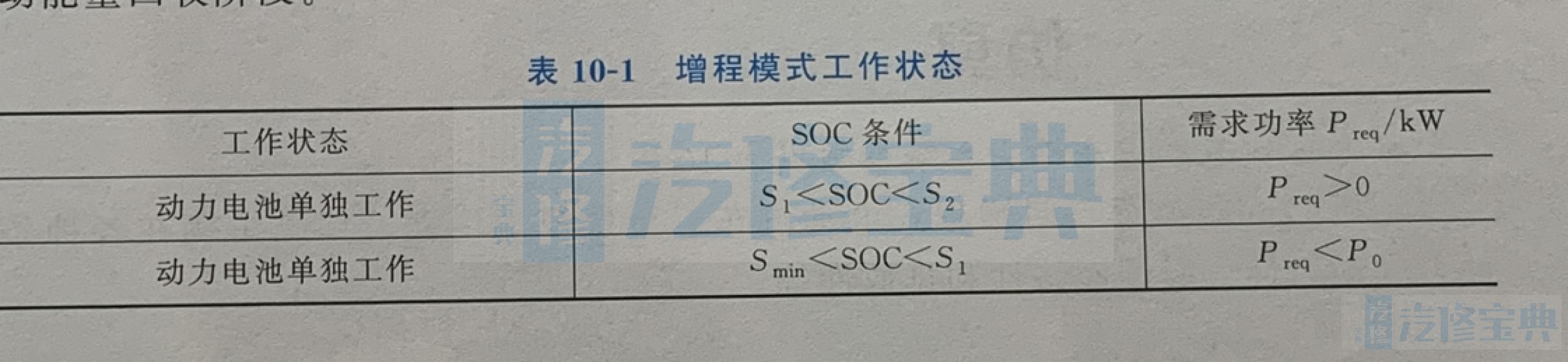
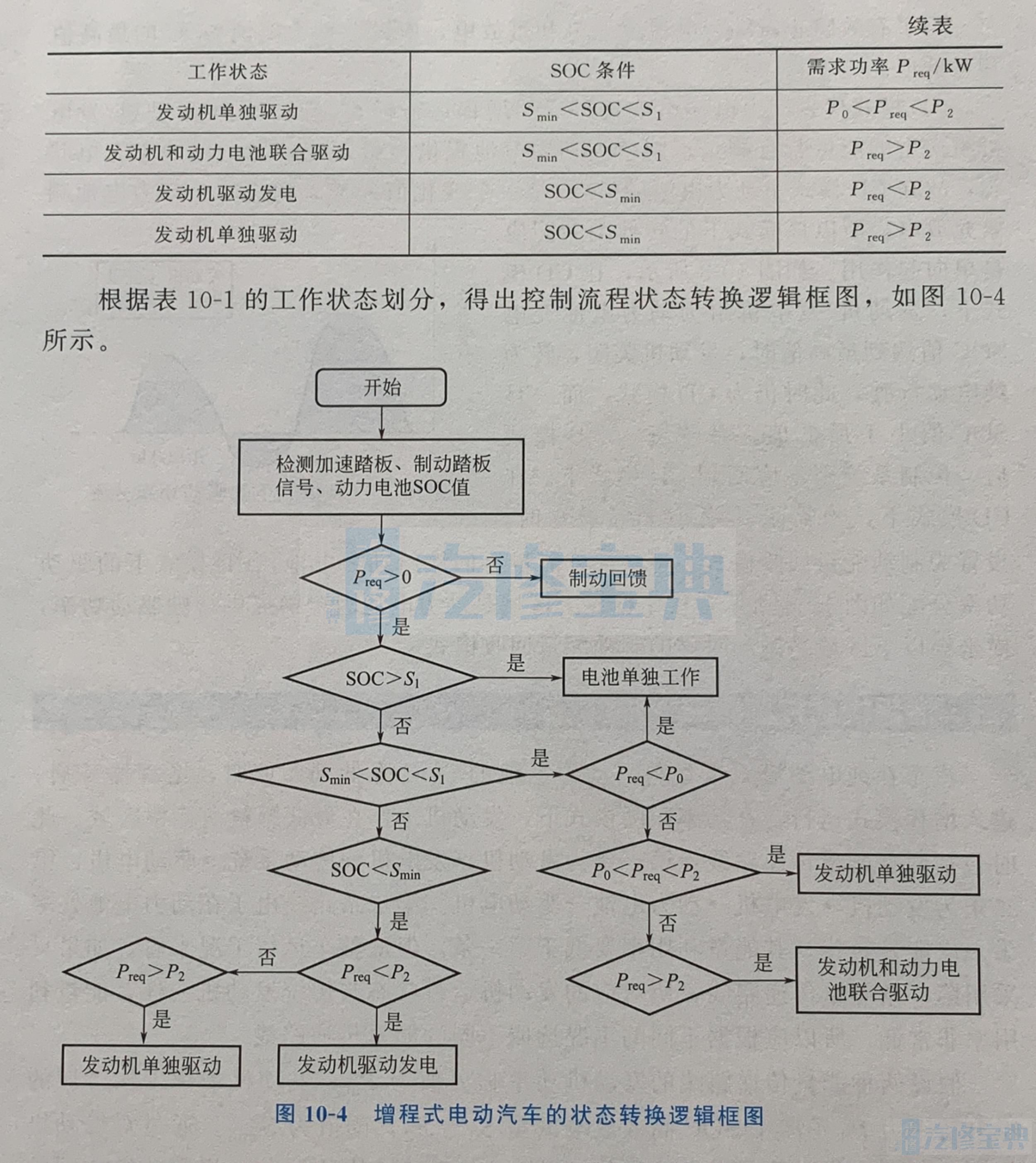
假设两种能量传递路线的发动机功率临界值为P。,发动机最优工作区域的输出功率为P1~P2;SOC高效放电区是S1~S2,阈值为Smin。通过对发动机工作区域的划分以及动力电池最优充放电SOC区域值的划分,将驱动模式下的工作状态分为6个区域,见表10-1。此外,将需求功率小于0的状态,定义为制动能量回收阶段。