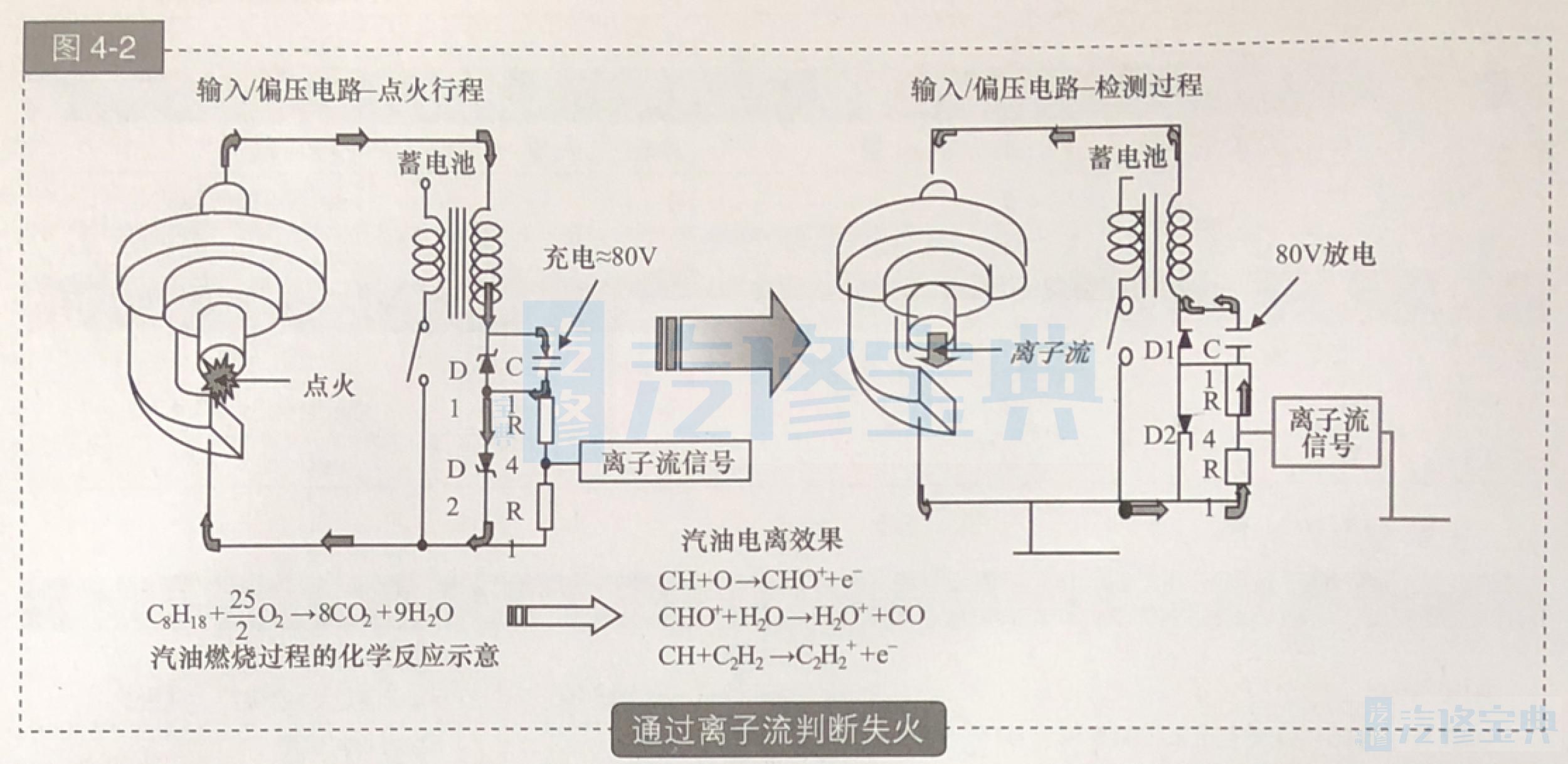
1.失火检测的工作原理。 在多种失火检测方案中(例如图4-2的通过离子流判断失火),已确认检测曲轴转速的变动是最合适的方法。
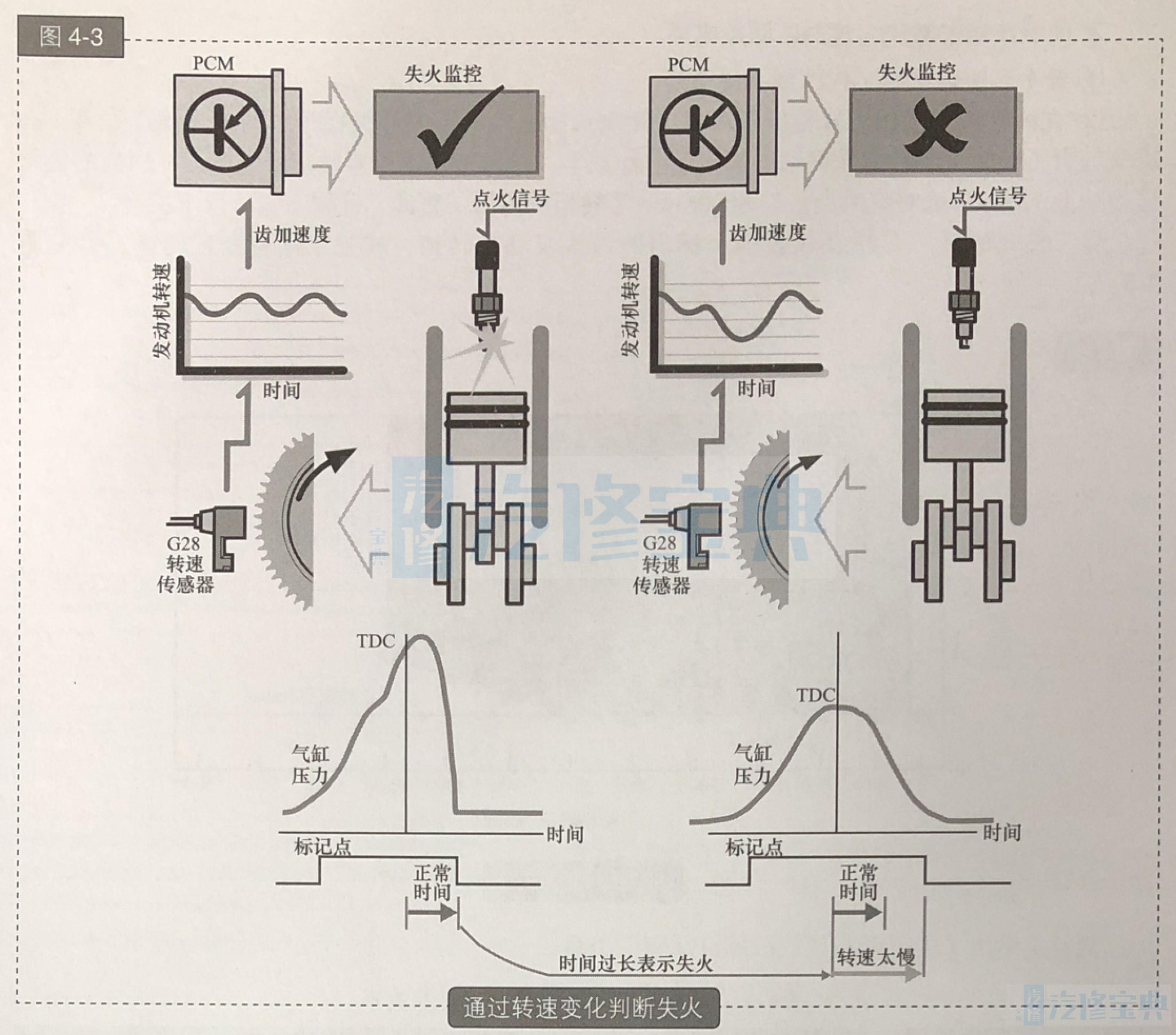
奧迪/大众的失火检测是通过转速传感器精确感知来自曲轴飞轮信号盘的发动机转速波动,以判断是否出现失火。当失火发生时,发动机转矩会突然下降,并引起发动机曲轴上飞轮信号的“齿加速度”发生变化,因而系统可以用“齿加速度”的变化来表示发动机运转的粗糙度水平,从而进行失火检测,参见图4-3。
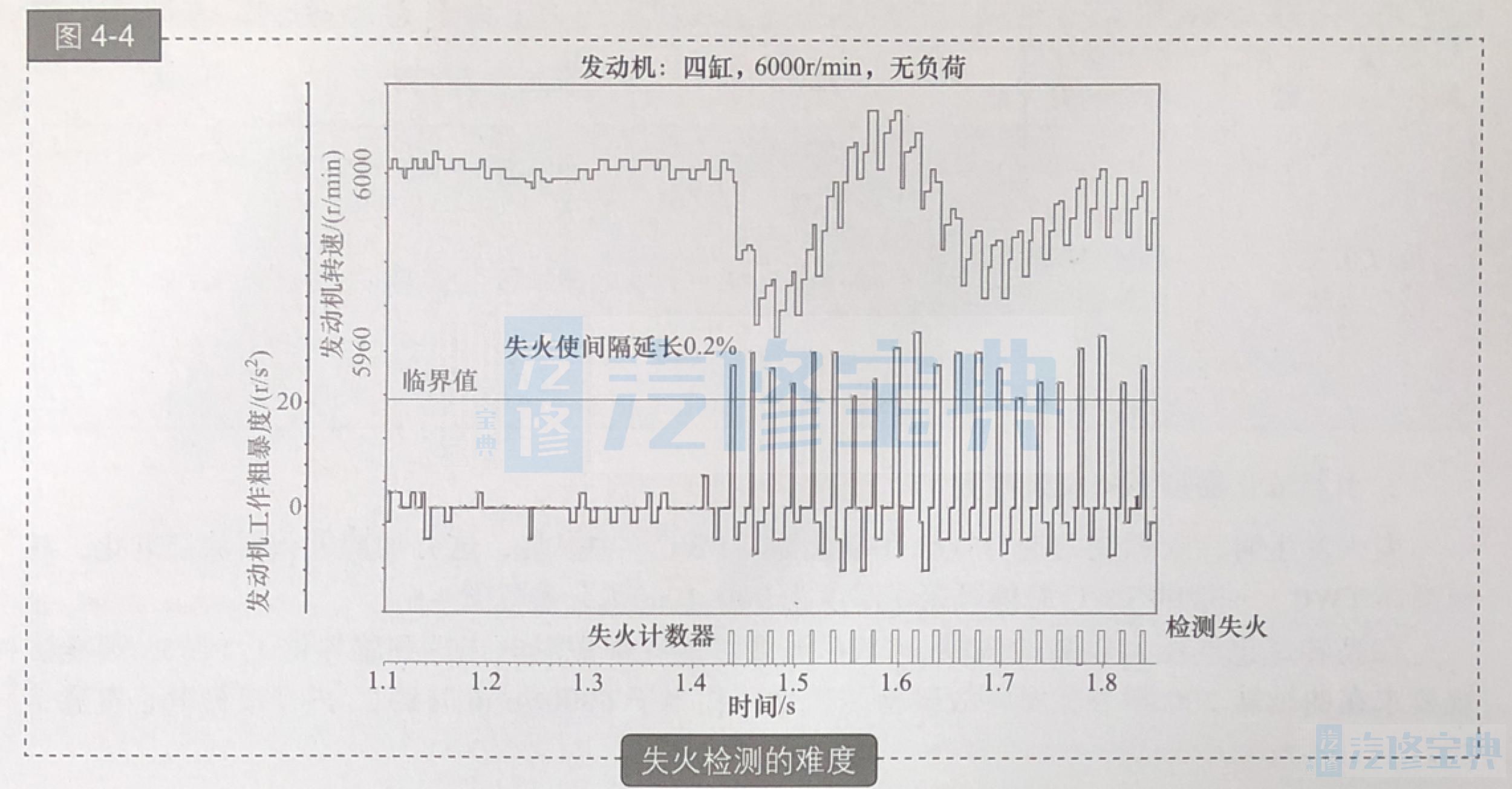
要精确检测失火是较难的,因为失火仅使间隔延长0.2%,参见图4-4。因此ECM需要采取多种措施防止误判。
2.排放法规中对失火检测区域的描述。
①整个转矩输出的工作区域都应检测。
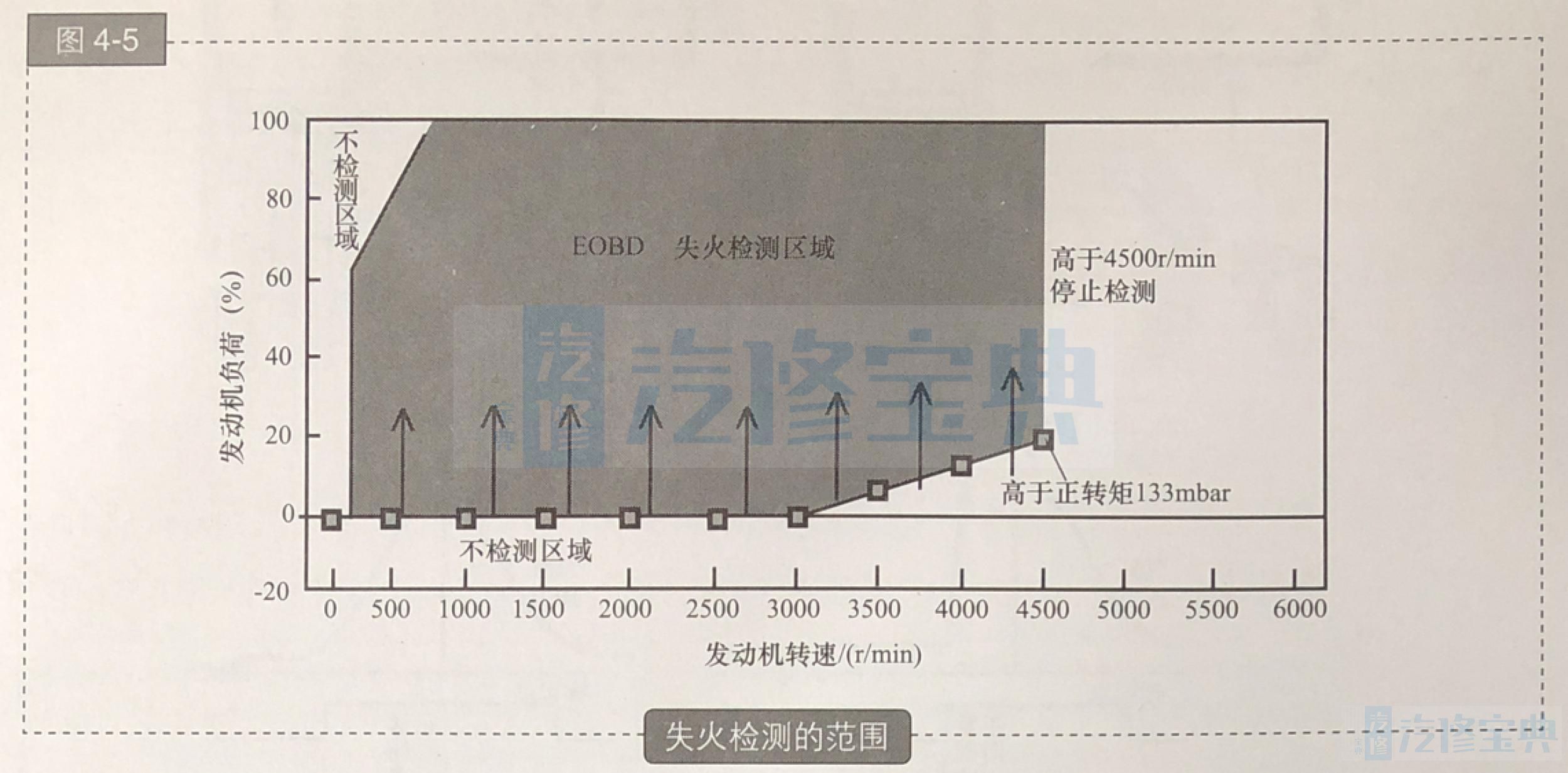
②在高转速进气压力较低区域可以关闭失火检测。这个区域根据指定的方法确定失火:在进气压力(纵轴)和转速(横轴)确定的坐标系上,过转速红线上零转矩线上的点,对应的歧管压力加上133mPa处对应的点,与3000r/min零转矩的点做一直线,此线下方可以不检测。
“转速红线”是指在仪表板上标出的最大发动机转速,或是发动机断油转速,参见图4-5。
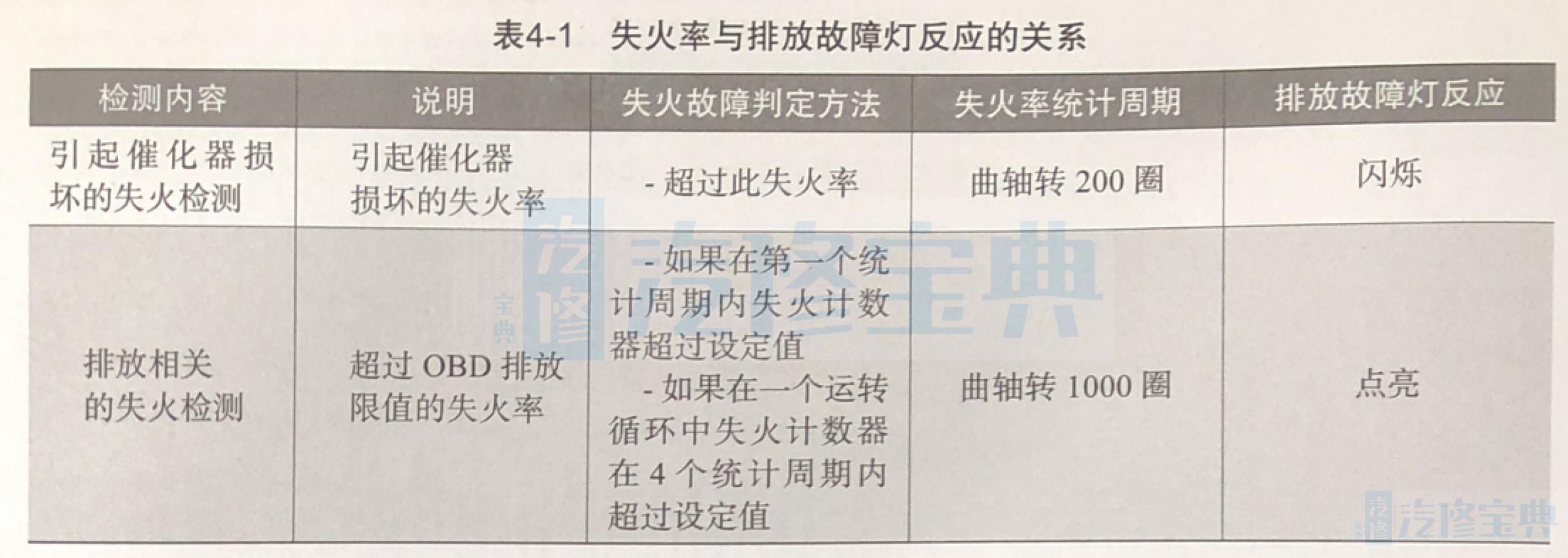
表4-1给出了失火率与排放故障灯反应的关系。
3.引起催化器损坏的失火检测。
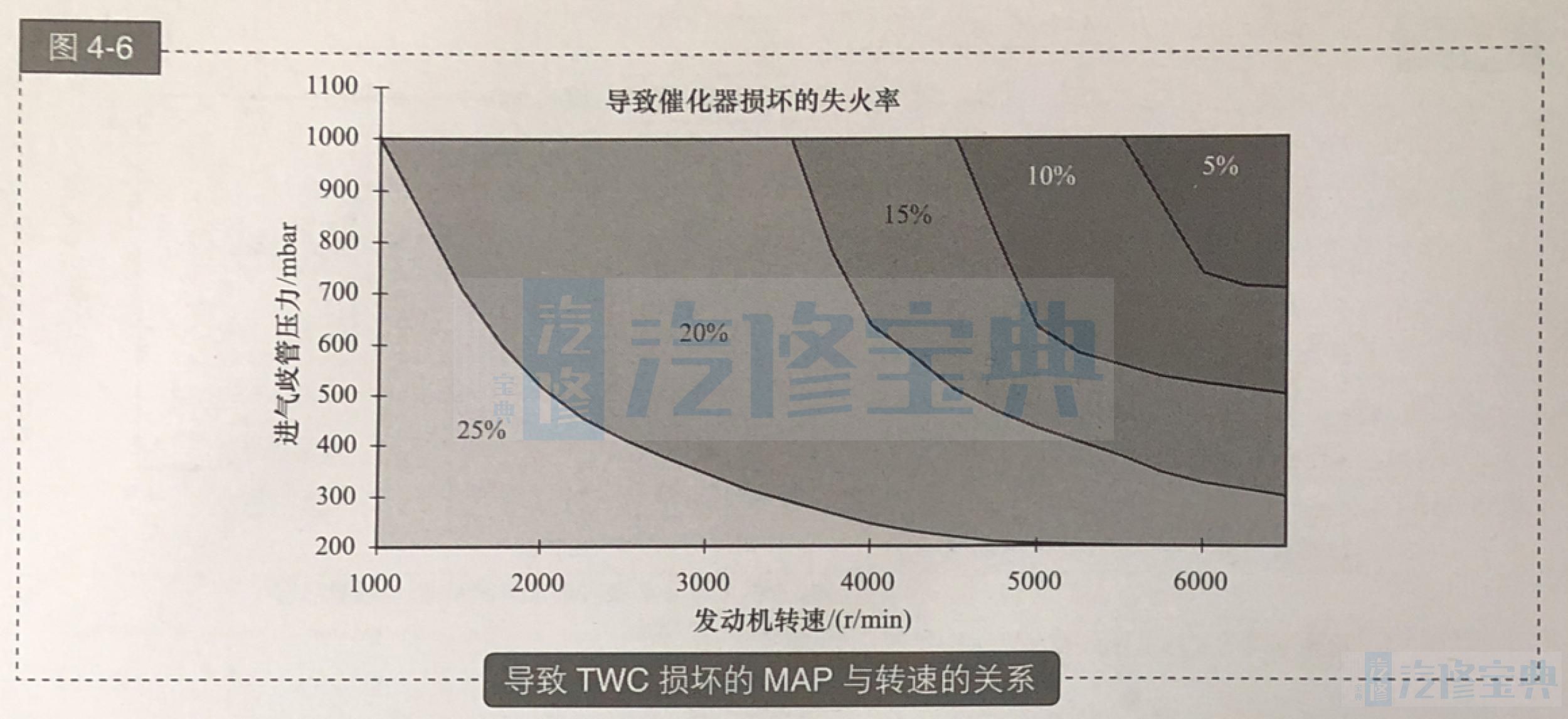
失火发生时,未燃烧的混合气会在催化器(TwC)中燃烧,这会加速催化器涂层老化,甚至损坏TWC。一般的TWC载体可接受温度为900~1000℃,参见图4-6。
在高转速进气压力较高的区域,TWC温度可能在很短时间内达到临界值(≈1s),因此法规要求在曲轴转200圈内就要将故障检测出来,相当于6000r/min时约2s内完成检测是有意义的。
4.G28信号盘齿隙学习。
为了修正G28信号盘的齿隙偏差或发动机独特的运转特性,在更换G28或信号盘后,必须对失火识别进行匹配。成功匹配是进行可靠失火识别的前提。
①早期欧Ⅲ车型,装备OBD的西门子发动机管理系统,G28信号盘齿隙学习方法:清除故障码;01-10-00清除自适应值;01-04-060节气门基本设定;举升车辆,从1档至5档,每个档位将发动机转速提高到4500rmin后,迅速松加速踏板,直至转速降至最低。
②早期非西门子系统:在滑行状态下实现。因为此时没有出现燃烧过程,发动机的旋转运动较均匀。
③现在所有的系统:只要未出现失火,可在整个运行过程中实现。
针对②和③,其学习方法是:清除故障码;01-10-00清除自适应值;在直路,让发动机在惯性滑行中的转速由约4000r/min降至2000r/min,共5次。