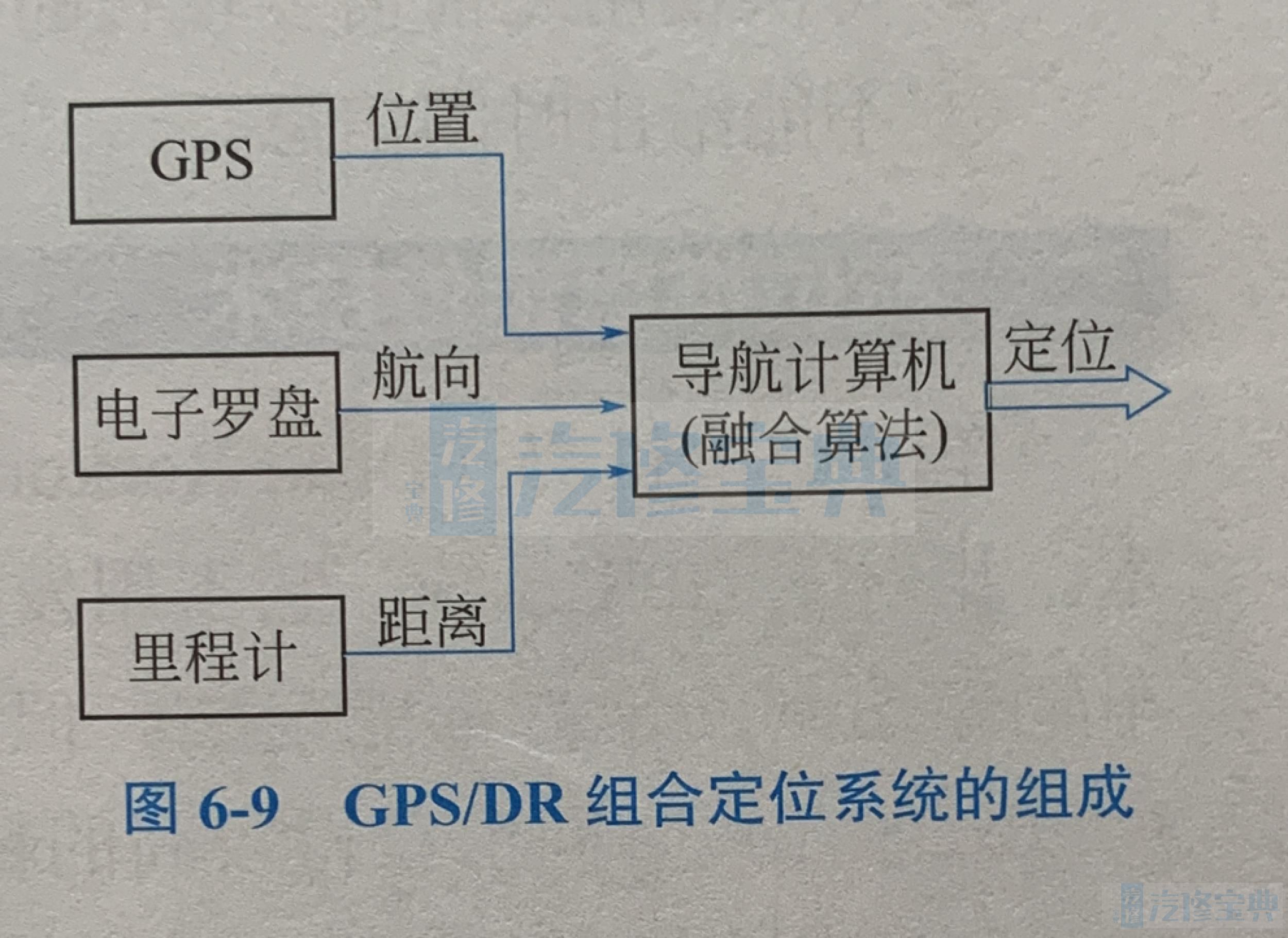
GPS/DR组合导航定位系统由GPS、电子罗盘、里程计和导航计算机等组成,如图6-9所示。
GPS独立给出车辆所在位置的绝对经度、纬度和海拔高度;电子罗盘作为航向传感器测量GPS位置车辆的航向;里程计测量汽车单位时间内行驶的里程;导航计算机采集各传感器数据并做航迹电子罗盘航向导航计算机|定位(融合算法)推算、GPS坐标变换及相关数据预处理,由融合算法融合估计出车辆的动态位置。 GPS/DR组「里程计距离合导航定位系统是一种成本相对低的导航系统,图6-9GPS/DR组合定位系统的组成在这个系统上进行 GPS/DR数据融合,可以实现较高精度的导航定位。
要实现 GPS/DR组合定位的关键在于如何将两者的数据融合以达到最优的定位效果。目前,关于GPS/DR组合的数据融合方法很多,最常见也是使用最广泛的就是卡尔曼滤波方法。将卡尔曼滤波应用于 GPS/DR组合定位系统当中,就是将GPS和DR的定位信息综合用于定位求解,通过卡尔曼滤波来补偿修正DR系
统的状态,同时滤波之后的输出又能够为DR系统提供较为准确的初始位置和航向角,从而能够获得比单独使用任意一种定位方法都更高的定位精度和稳定性,其结构图如图6-10所示。