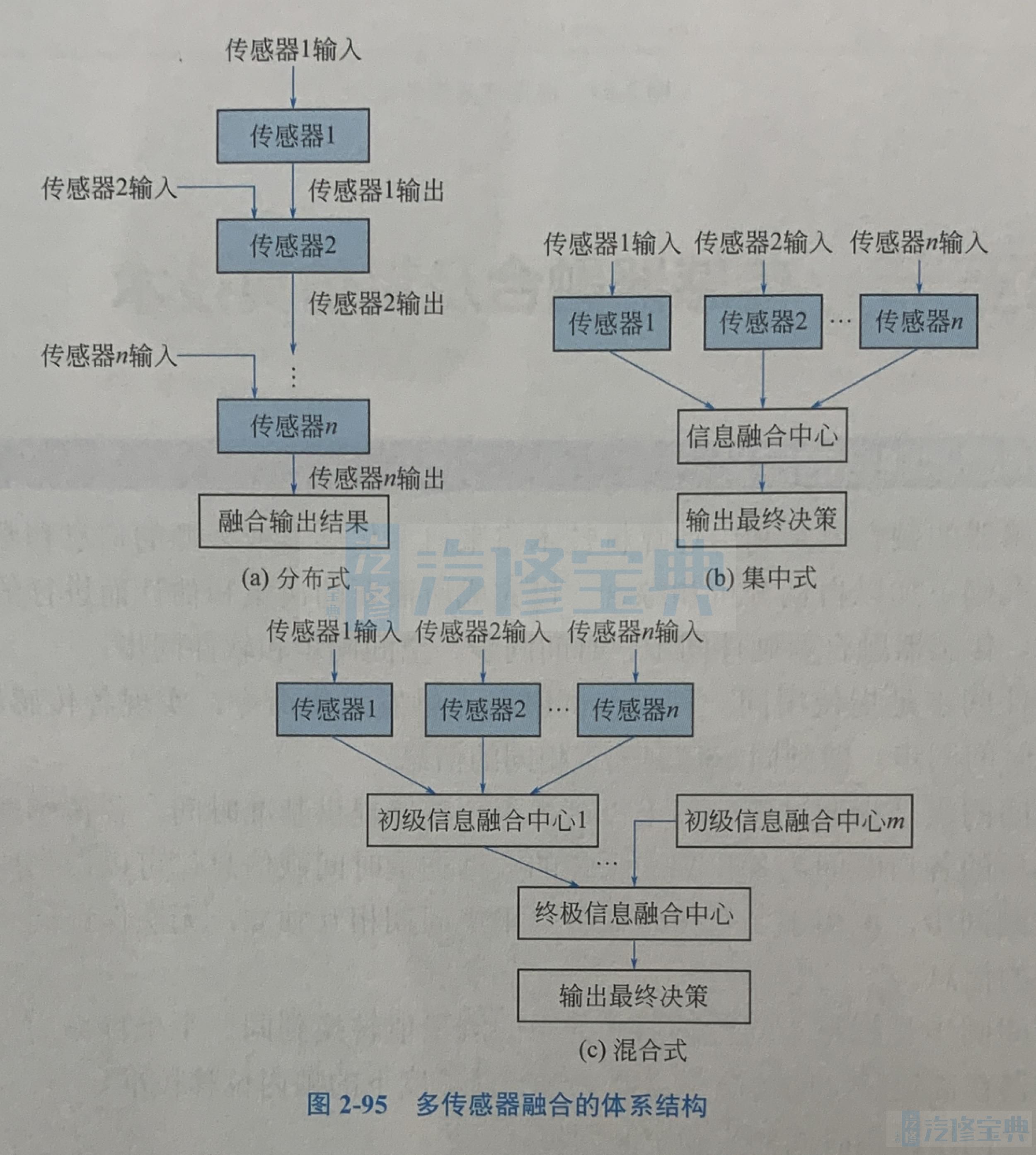
在自动驾驶技术中,现有的车载传感器包括超声波雷达、毫米波雷达、激光雷达、视觉传感器等,各种传感器各有优劣,根据各传感器的特点,不同环境下应选择不同的传感器,但是单一传感器的使用无法完成无人驾驶的功能性与安全性的全面覆盖,比如仅靠视觉传感器识别物体,在遭遇大雾、雨雪等恶劣天气时很容易影响识别精度。多传感器信息融合的优势在于,能够综合利用多种信息源的不同特点,多方位获得相关信息,从而提高整个系统的可靠性和精准度。未来传感器融合技术将显得更加重要,并且会成为一种趋势。多传感器信息的融合是无人驾驶安全出行的前提。 传感器的融合就是将多个传感器获取的数据、信息集中在一起综合分析,以便更加准确、可靠地描述外界环境,从而提高系统决策的正确性。 多传感器融合的体系结构分为分布式、集中式和混合式,如图2-95所示。
(1)分布式先对各个独立传感器所获得的原始数据进行局部处理,然后再
将结果送入信息融合中心进行智能优化组合来获得最终的结果。分布式对通信带宽的需求低,计算速度快,可靠性和延续性好,但跟踪的精度却远没有集中式高。
(2)集中式集中式将各传感器获得的原始数据直接送至信息融合中心进行融合处理,可以实现实时融合。优点是数据处理的精度高,算法灵活;缺点是对处理器的要求高,可靠性较低,数据量大,故难以实现。
(3)混合式混合式多传感器信息融合框架中,部分传感器采用集中式融合方式,剩余的传感器采用分布式融合方式。混合式融合框架具有较强的适应能力兼顾了集中式和分布式融合的优点,稳定性强。混合式融合方式的结构比前两种融合方式的结构复杂,这样就加大了通信和计算上的代价。
各种不同的传感器,对应不同的工况环境和感知目标。例如,毫米波雷达主要识别前向中远距离障碍物(0.5~150m),如路面车辆、行人、路障等;超声波雷达主要识别车身近距离障碍物(0.2~5m),如泊车过程中的路沿、静止的前后车辆、过往的行人等信息。两者协同作用,互补不足,通过测量障碍物角度、距离、速度等数据融合,刻画车身周边环境和可达空间范围。