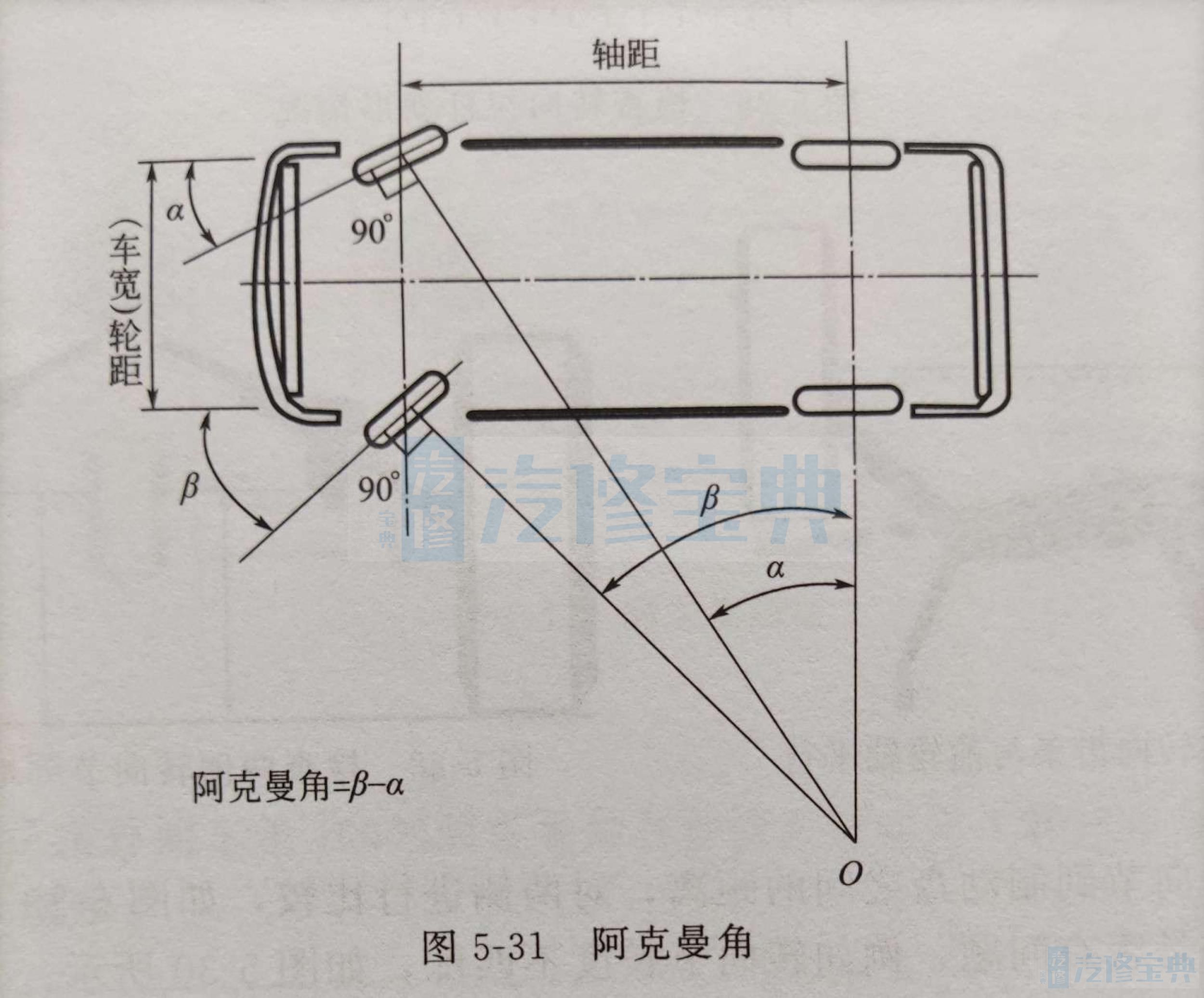
1.阿克曼角: 如图531所示,阿克曼角就是汽车转向时,外侧车轮和内侧车轮的转向角度不一致产生的夹角。由于内外侧车轮转向半径不同,因此内侧车轮总是要比外侧车轮的角度更大点,才能保证车身转弯的平顺。 阿克曼角是在1818年由 Rudolph Ackermann提出的专利,它是在底盘设计的时候就考虑进去的因素,他是19世纪初四连杆转向系统的发明人。 内侧车轮转向比外侧车轮转向更快,这样车辆在转弯时会有更小的轮胎磨损。设计时,在几何关系上所有车轮拥有共同的转向中心,也就是说车辆有着100%阿克曼几何关系。通常受到其他设计的局限(如操控系统)的影响时,车辆不设计成100%阿克曼几何关系。如果外侧车轮只转到100%阿克曼几何关系的一半,可说成车辆有50%阿克曼几何关系。注意在整个转向过程中四连杆转向系统不会保持在相同的阿克曼几何关系上。转向的对称性可用于确定车辆在校正后悬架是否损坏或调整不当的诊断手段。另外需要注意的是为了与其他设计部分匹配,有些车辆刻意设计成不对称式。
2.阿克曼角的作用:
转向系统上真正的阿克曼几何关系是指当车辆转向时使所有车轮以相同点画圆弧。随着汽车发展,为了实现轮胎磨损小和适当的操作特性,汽车制造商需要测量阿克曼几何关系为使轮胎磨损最小化,阿克曼几何关系在货车设计、舰船维护上也相当重要。相对于长途汽车,城运货车有着不同的阿克曼几何关系,这需要通过更换转向臂来实现。
实际上,在整个转向过程中,受转向连杆特性限制,得不到真正的阿克曼角。真正的(100%)阿克曼角只有车辆在超低速急转向时才能获得。其他车辆设计因素(如重心变化轮胎特性和车辆操作动态响应)可能会要求不同的转向几何关系。通常情况下,所设计的阿克曼几何关系小于100%。
阿克曼误差和阿克曼对称性(或不对称性)也可用于检测转向系统上损坏或不可靠的部件。以整个阿克曼规范(全部与所有转向值交叉的曲线)对转向连接件问题做一个确切的诊断。另外,在其阿克曼特性上,大多数车辆设计成对称式(边到边)。
3.阿克曼分析:
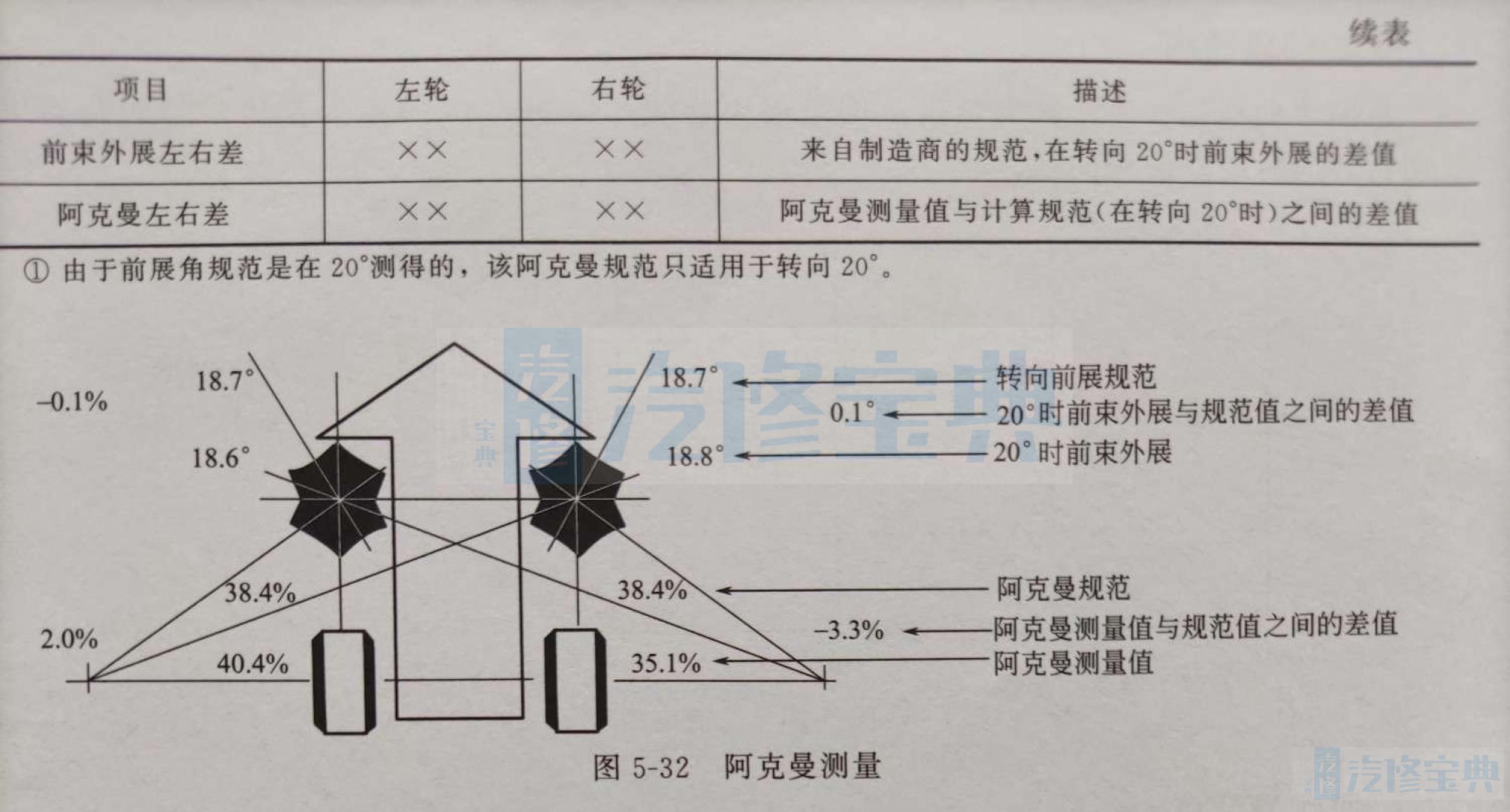
如图5-32所示,图中的说明文字对于左、右参数对称适用。
阿克曼相关描述见表5-1,其值在产品管理上没有被标注。
4.阿克曼误差:
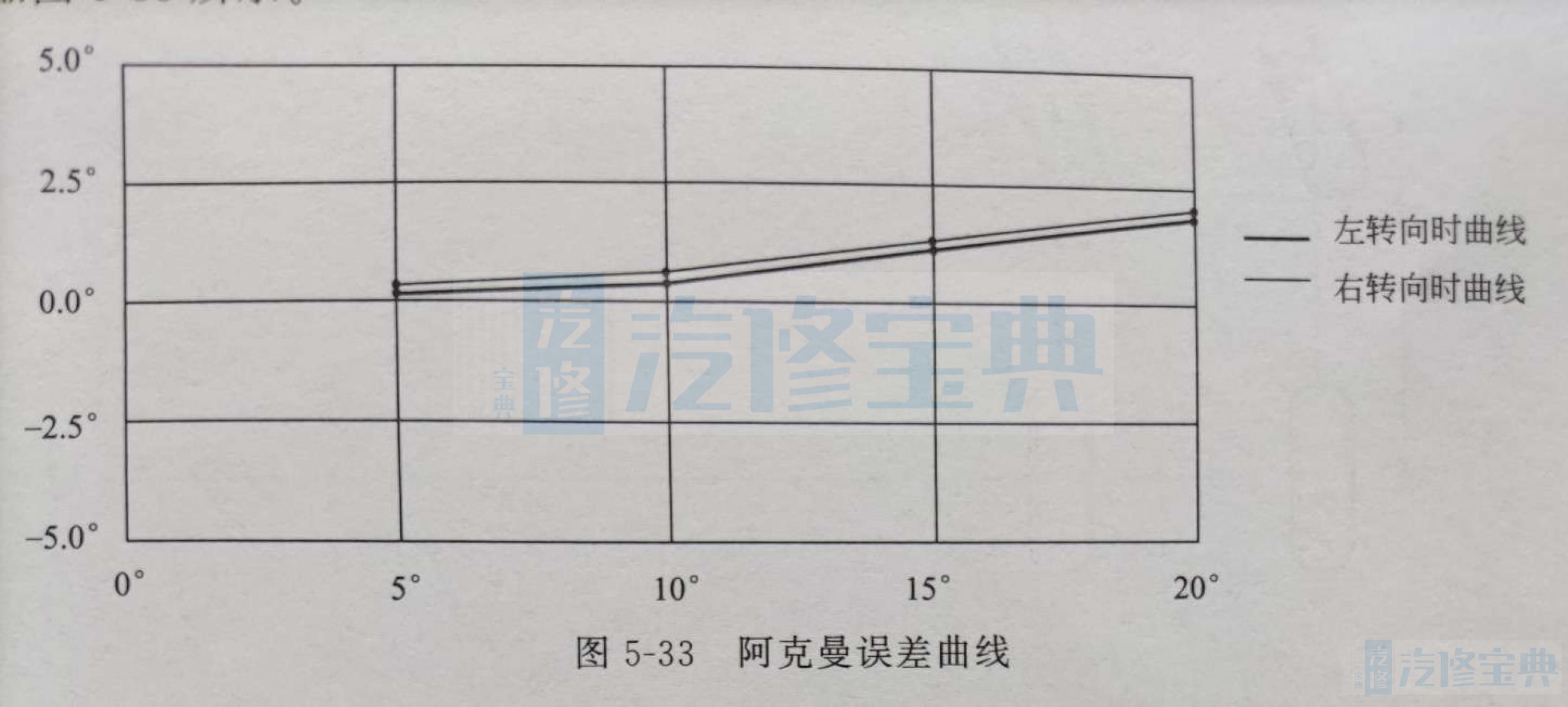
阿克曼误差是指外侧车轮100%阿克曼角与外侧车轮在每个转向角度上的测量值之间的差值,如图5-33所示。
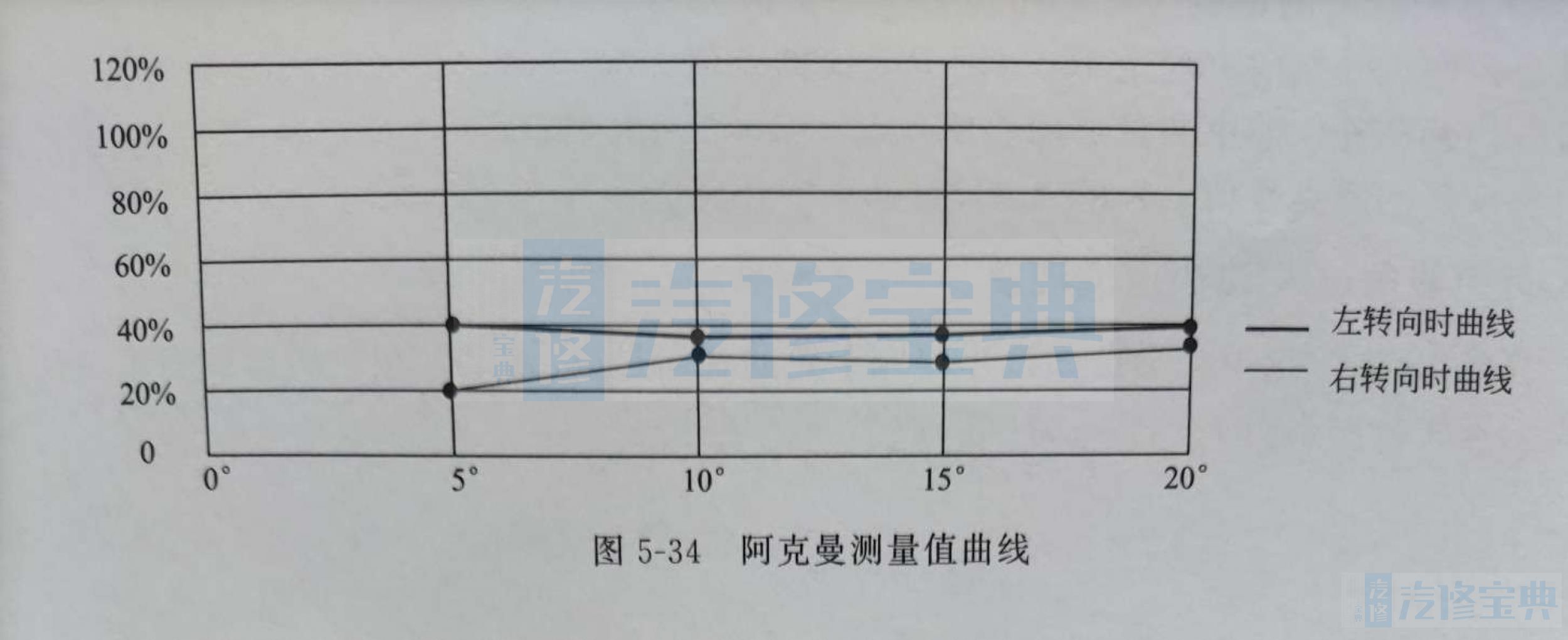
5.阿克曼测量值:
阿克曼测量值是以所测量总前束与外侧车轮在每个转向角度以100%阿克曼几何关系计算的总前束比值(%),如图5-34所示。
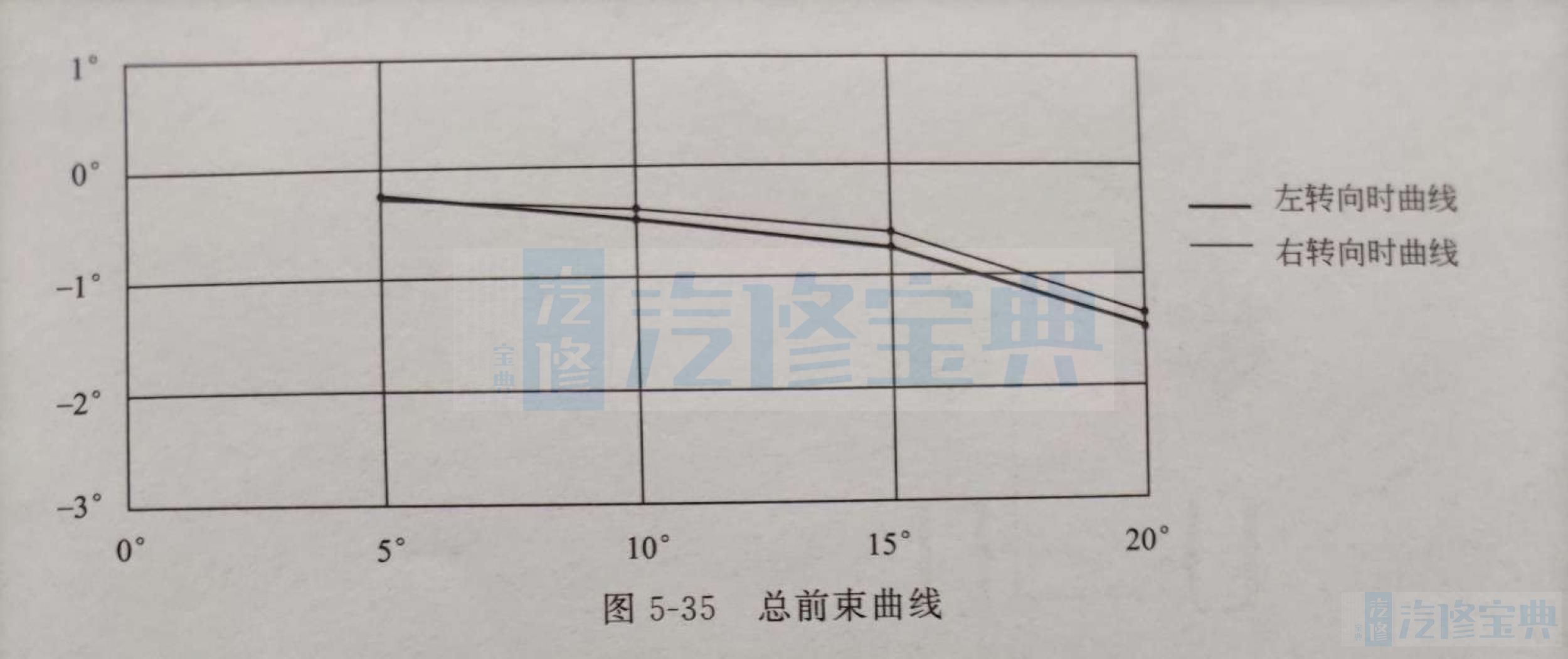
6.总前束曲线:
总前束曲线指在每个转向角度上的总前束连线。如图5-35所示为左转向时的总前束曲线和右转向时的总前束曲线。
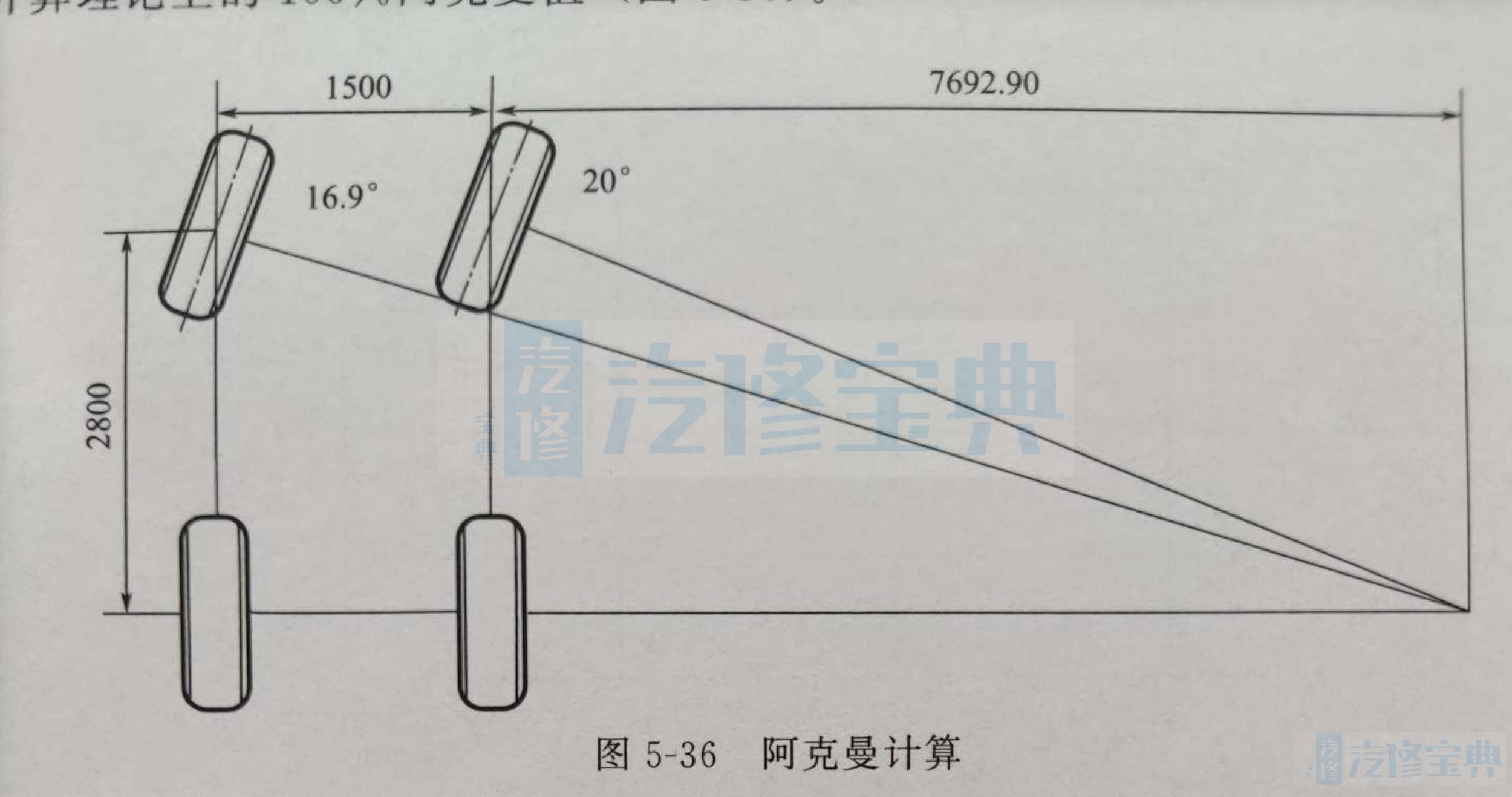
7.阿克曼计算:
①计算理论上的100%阿克曼值(图5-36)。
轴距=2800mm,轮距=1500mm。
内侧车轮转向20°时,计算与后桥中心线交点:2800mm/tan20°=7692.9mm计算外侧车轮与内侧车轮在相同位置的交点的角度: arctan[2800mm/(7692.9mm+1500mm)]=16.9°。
②计算阿克曼测量值(图5-36)。
计算内侧和外侧前束理论100%阿克曼值的差值:200-16.90°=3.1°。
计算内侧和外侧前束测量值的差值:20°-18.5°=1.5°。
计算实际的阿克曼值:1.5°/3.1°×100%=48%。
8阿克曼角过大过小造成现象:
阿克曼角过大/过小,会造成汽车内侧车轮的转向过度/不足,在轮胎抓地力不足的情况下,就会发生轮胎拖滑、跳胎、异响的情况。