目前测定汽车之间或汽车与物体之间距离的方法,根据检测介质的不同,主要有超声波法、红外法、激光法和微波雷达法等几种。 ①激光法和红外法,由于其检测面太小,探头需要光学窗口,容易被泥沙遮挡,而且在近距离上发挥不理想,因此在汽车上应用较少。 ②超声波是超过人耳听觉上限的“声波”,频率范围在20~500kHz,是一种人耳听不到的“声波”。超声波产生于机械振动,在空气中传播速度和声音相同,约340m/s。超声波探测距离相对较短,适应测距范围在0.1~3m之间。防水、防尘,少量的泥沙遮挡也无妨。
目前主要应用在车辆倒车控制系统中。常见超声波传感器频率为40kHz。
③微波雷达常采用毫米电磁波作为探测介质,故也可称为毫米波雷达。微波具有探测距离远、穿透能力强、运行可靠以及实时性佳等优点,并且检测性能受环境及天气等外界因素的影响较小,可直接探测获得车辆与前方目标车的距离和相对速度信息。因此常被用在汽车主动安全系统中,如自适应巡航控制系统ACC、预碰撞安全系统中。
超声波距离传感器也称为超声波换能器,俗称“探头”。它是利用超声波检测出车辆后方障碍物的位置(包括距离),并利用指示灯和蜂鸣器将车辆到障碍物的距离及障碍物的位置通知驾驶人,从而起到安全倒车的作用。
超声波探头有压电式、磁致伸缩式、电磁式等,汽车用的超声波传感器主要是压电式。
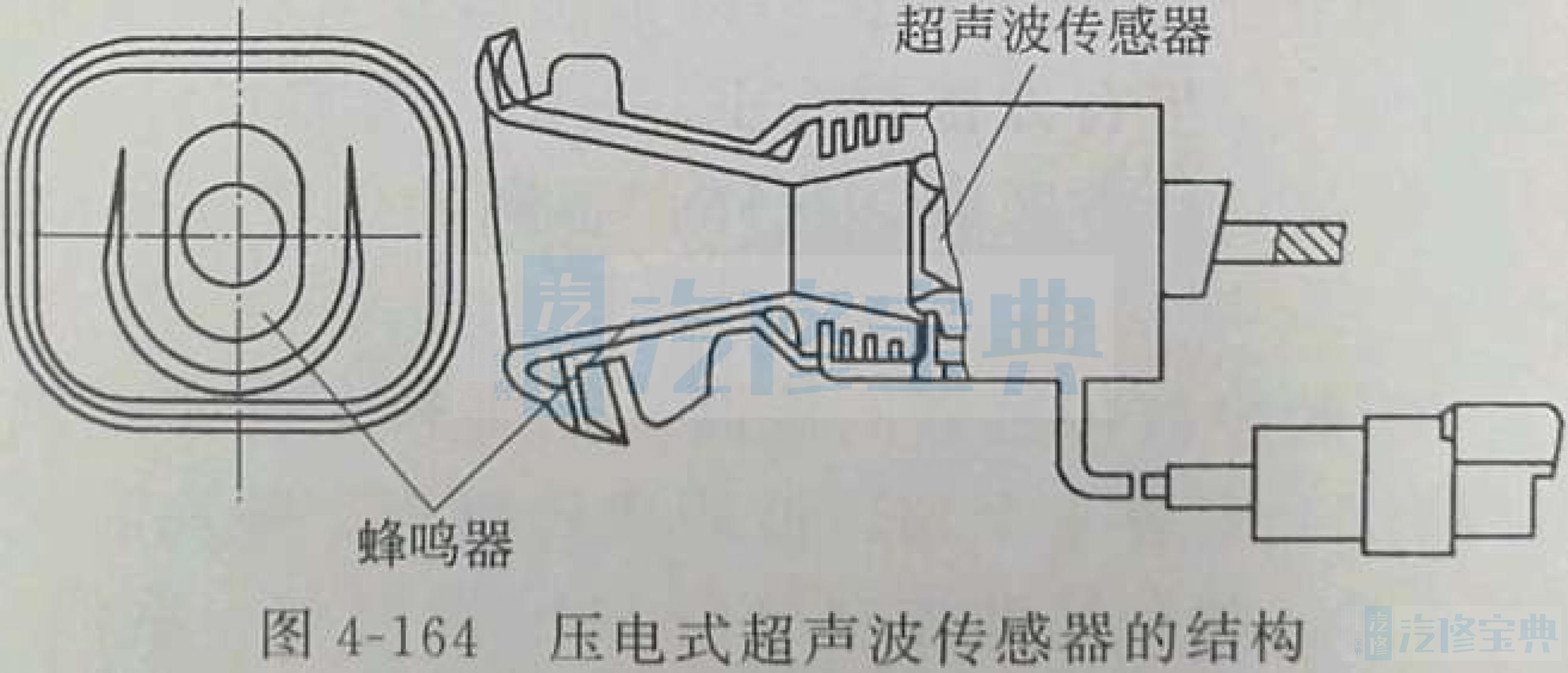
1.超声波距离传感器(1)压电式超声波传感器①压电式超声波传感器的结构。
压电式超声波传感器采用压电元件锆钛化铅,一般称为PZT。这种传感器的特点在于它具有方向性,传感器用蜂鸣器的纸盒为椭圆形,其目的是使传感器的水平方向特性宽,而垂直方向受到限制,其结构如图4-164所示。
压电式超声波传感器的发射器是利用压电材料的压电效应工作的。当在压电材料上施加交变电压时,就会使压电元件产生机械振动从而产生超声波。
压电式超声波接收器一般是利用压电材料的逆效应进行工作的,其结构和超声波发生器基本相同,有时就用一个换能器兼做发生器和接收器两种用途。当超声波作用到压电材料上时会使压电材料收缩,在晶片的两个界面上便产生了交变电荷,这种电荷转换成电压经放大后送到测量电路,最后记录或显示出来。
汽车用超声波传感器根据探测距离分为短距离和中距离两种类型。短距离超声波传感器的检测距离约为50cm,中距离超声波传感器的检测距离约为2m。
在打开点火开关以后进行自检,在1s后关闭自检。如果驻车辅助系统已待命,则信号声会短促响起,功能指示灯亮起。如果发现系统故障,就会响起一个持续5s的信号声,驻车辅助系统的功能指示灯闪烁。在正常情况下进行测距时,在声脉之间的暂停间隔时间随着距离逐渐减小而成比例缩短。测量不超过30cm的距离时,声脉变为持续音。
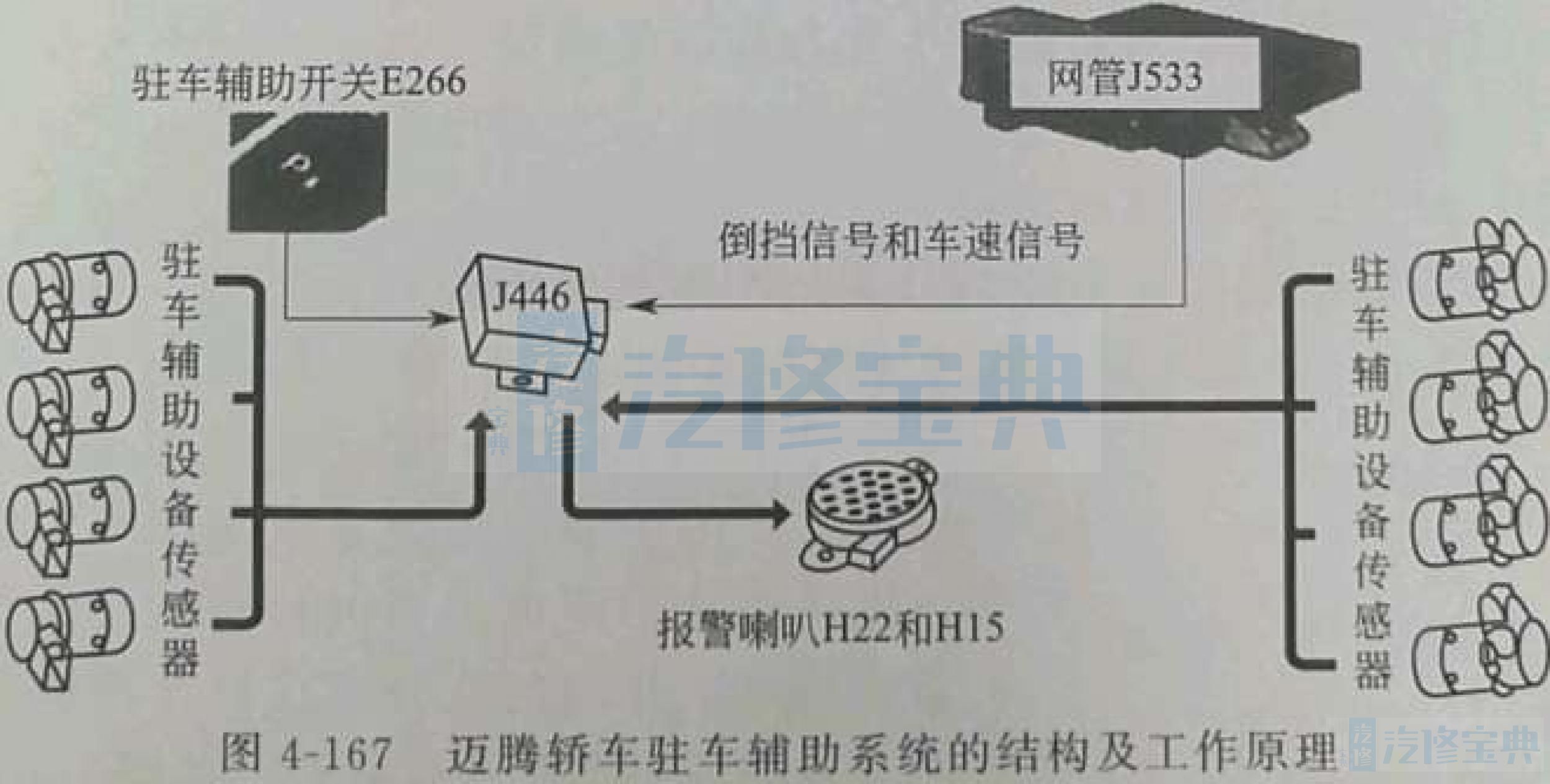
迈腾轿车驻车辅助系统检测方法如下。
①驻车辅助ECU J446及驻车辅助ECU J446线路根据电路图4-168~图4-170进行检查。检查驻车辅助ECU J446的供电线路,拆下驻车辅助ECU的插接器,检查T16/3脚与搭铁之间的电压为12.3V,打开点火开关,检查T16/1脚与搭铁之间的电压为12.3V,说明正极线路供电正常(T16/3脚SC37的端子30供电,倒车雷达T16/1脚接收来自SC19的端子15供电)。
②检查T16/8脚与正极之间的电压为12.3V,并检查后备厢内的搭铁点是否良好。
③检查驻车辅助系统传感器线路前部T3ax/1、T3ay/1、T3ba/1、T3az/1与搭铁之间电压,为10.5~14.5V。
④检查驻车辅助系统传感器线路后部T3at/1、T3au/1、T3av/1、T3aw/1与搭铁之间电压,为10.5~14.5V。
⑤检査驻车辅助系统传感器线路3号端子与搭铁的导通性,应正常导通。
⑥打开点火开关,断开传感器插头,将车辆挂入倒挡,用万用表电压挡测量控制模块侧的1号端子与3号端子,应该有10.5~14.5V电压,如果没有,则应检查控制模块是否从倒挡开关处取得10.5~14.5V的工作电压。
⑦当倒车雷达主机在通电后,自检出现4~6s的长鸣音,发出“嘀、嘀、嘀、嘀、嘀”五声报警时,提示为倒车雷达主机出现故障。如果倒车雷达在通电后没有任何的提示反应,则请先检査倒车雷达主机端子的安装状态,是否为线束脱落或断路所造成。
⑧经验判断法。在汽车进入倒车工作状态下,用耳朵贴近传感器表面,仔细听是否有轻微的嘀嗒声(可与正常的比较),如果响声正常,则说明传感器的电源正常,应继续检查传感器和控制器之间的信号连接是否正常。如果搭铁、供电、线束都没有问题,则应尝试更换ECU和传感器。
2.激光雷达激光雷达是以发射激光束来探测目标位置的雷达系统,其功能包含搜索和发现目标;检测其距离、速度、角位置等运动参数;检测目标反射率、散射截面和形状等特征参数激光雷达根据扫描机构的不同,有二维和三维两种。它们大部分都是靠旋转的反射镜将激光发射出去,并通过检测发射光和从障碍物表面反射光之间的时间差来测距。三维激光雷达的反射镜还附加一定范围内俯仰,以达到面扫描的效果二维激光雷达和三维激光雷达在先进驾驶辅助系统上得到了广泛应用。
激光雷达由激光发射系统、光电接收系统、信号采集处理系统、控制系统等组成,其简化结构如图4-171所示。
激光雷达发射系统主要负责向障碍物发射激光信号;接收系统主要负责接收经障碍物反射之后回来的激光信息;信号采集处理系统主要负责将接收回来的信号进行处理,使它能够符合下一级系统的要求,它是激光雷达系统最关键的环节,将直接影响激光雷达系统的检测精度;控制系统的主要作用是提供信号并且对接收回来的信号进行数据处理。
3.电磁波测距传感器(毫米波雷达传感器)(1)结构。毫米波雷达是指工作频率介于微波和光波之间,选在30~300GHz频域(波长为1~10mm,即1mm波波段)的雷达。
测距传感器又称雷达传感器,主要用于自适应巡航系统、自动泊车系统、倒车系统等,尤以自适应巡航系统和碰撞预测安全系统应用最为普遍。
毫米波雷达传感器总成由毫米波雷达电路、信号处理电路和CPU组成。车速不低于2km/h时,毫米波雷达输出雷达波。毫米波雷达使用76.5GHz波段的频率。
接收天线接收反射的毫米雷达波,信号处理电路通过产生毫米雷达波并计算接收天线接收到的信号检测物体的距离、相对速度和方向,然后将该信息传输至行驶辅助ECU总成。
碰撞预测安全系统的毫米波雷达传感器采用76.5GHz波段内的频率,毫米波雷达不宜受天气状况,如雨、雾或雪的影响,具有良好的物体识别特性。因此,非常适用于碰撞预测安全系统和动态雷达巡航控制系统。
(2)毫米波雷达传感器的调整。毫米波雷达传感器信号不正常,会在碰撞预防安全系统控制单元中存储故障码。确定传感器信号不正常后,应先调整传感器,传感器本身不允许维修,只能更换总成。
水平调整传感器总成:确保车辆停在水平路面上。调整前需要先检查轮胎压力,并从车上卸下超重物,如行李。拆下冷气进气管密封。
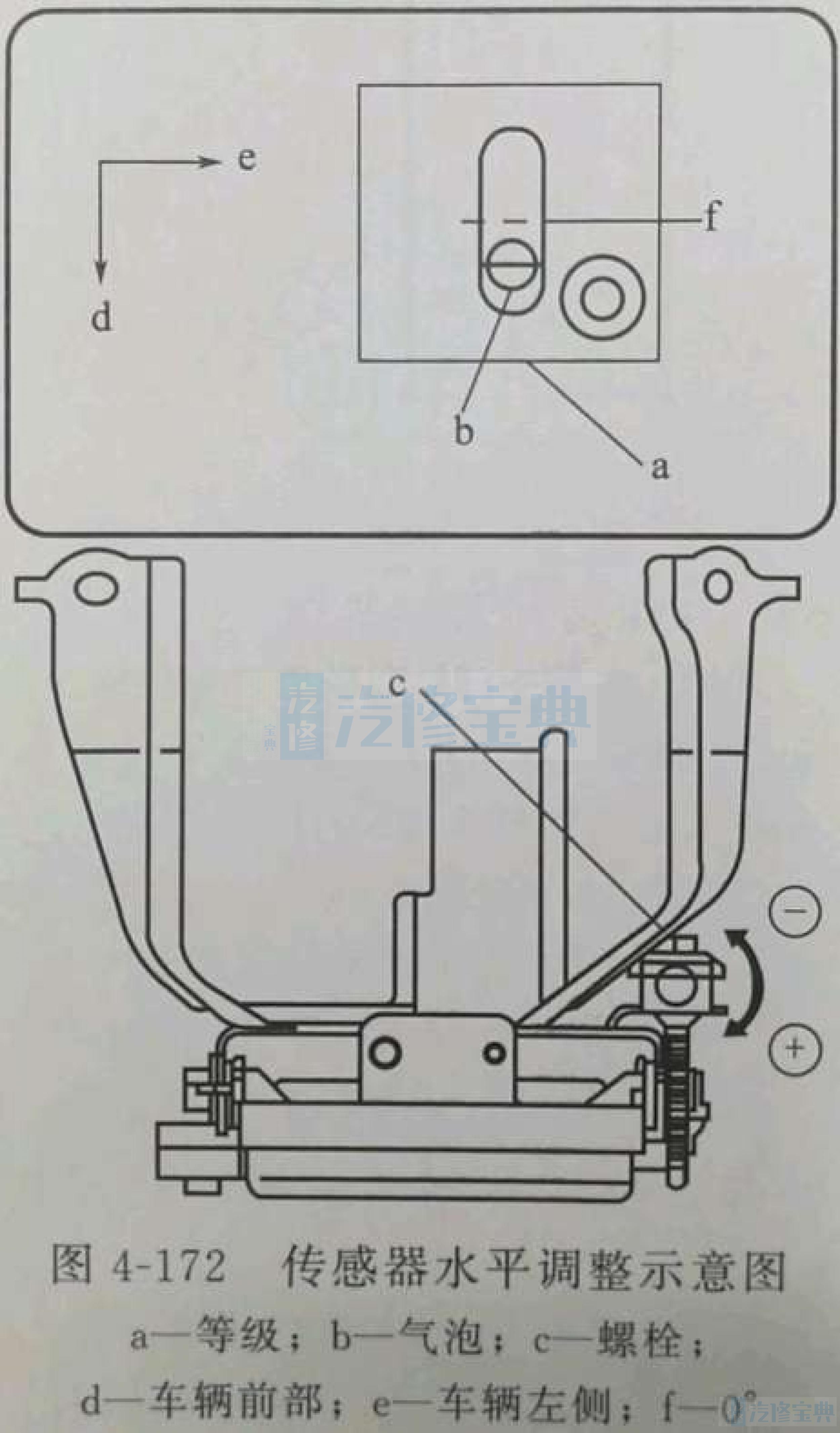
清除毫米波雷达传感器水平支架上的尘土、油污和异物。在毫米波雷达传感器水平支架上固定水平仪。检查水平仪气泡是否在红色框内。如果气泡不在红色框内,则使用螺钉旋具调整螺栓,直到气泡在红色框内为止,如图4-172所示。
调整方法是:向上调整,即将螺钉旋具向正(+)侧转动;向下调整,即将螺钉旋具向负(-)侧转动。
螺钉旋具转动一圈时,调整约0.12°。