背景
车型:宝马750iL
现象
一辆1999款宝马750iL (E38)投诉减振器硬。试车,车震得很厉害,像没减振一样,但仪表与开关指示灯功能都正常。
分析
询问车主故障是怎么发生的,车主告知换了转向机且做了四轮定位后就硬了。
方案
01 用GT1检测没故障记录,看数据流,发现转向角+25°,不正常(车轮与转向盘在直线行驶位置),其他数据正常,估计故障就发生在转向角度上。用GT1给转向角度传感器调校归零(调校时将当前转向盘位置作为转向盘的直线行驶位置持久存储在转向角传感器的EEPROM中。因此,在调校时必须将前轮和转向盘精确对准直线行驶位置。此外,仪表板中的底盘型号被永久存储在转向角传感器的EEPROM中,调校成功后转向角传感器内存储的故障将被自动删除),试车,一切正常!
02 我们从原理分析为什么转向角度在直线行驶位置不在零位会影响减振器硬。
03 电子减振控制系统Ⅲ(EDCⅢ)是一个电子减振力调节系统。该系统可调节减振器的减振力使之与当前的行驶条件以及路况相匹配,以达到保证最大的驾驶安全性及舒适性的目的。
04 作为底盘的一部分,EDCⅢ的任务是补偿行驶期间作用在车辆上的动态力。以下作用力会作用在车辆上:
04-01 垂直力,例如因路面不平引起的
04-02 横向力,离心力侧风/转弯
04-03 纵向力,加速/制动
05 底盘的任务是接收传输到车辆上的作用力。而这个任务的大部分可由减振器完成,EDCⅢ的主要任务是在保持较高的行驶安全性的同时提高行驶舒适性。为此该系统配备了下列用于感测行驶状态的传感器:转向角传感器、速度传感器、前部车身加速传感器、后部车身加速传感器。根据这些传感器的行驶状态数据,由EDCⅢ控制模块将集成在减振器中的减振阀调整到软、中或硬的相应挡位。
06 驾驶员可以通过EDCⅢ程序按钮,选择两个不同的程序:按钮S位置代表运动模式程序、按钮K位置代表舒适模式程序。运动模式程序中减振器调至较硬,就是说可避免减振器变软。在位置K时3挡同时工作。有一个运动模式特性线和舒适模式特性线。
07 当用按钮选EDCⅢ程序(运动模式和舒适模式)的时候,通过一个集成在按钮中的LED灯可以显示哪个程序正被选择。如果带有符号S的LED灯亮起,EDCⅢ在运动模式程序状态下工作;LED灯不亮,则在舒适模式程序状态下工作。当然这仅适用于运行正常的EDCⅢ系统。
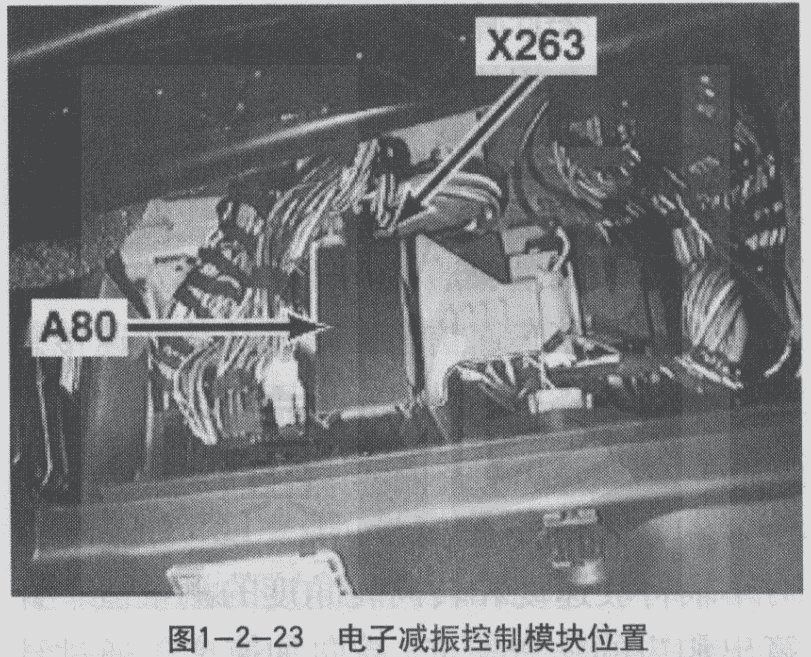
08 如果EDCⅢ系统失灵(例如传感器损坏)或者出现一定程度的故障,那么它无论如何也无法保证车辆安全所需的附着力,因此一个安全模式集成于EDCIII控制模块(图1-2-23)的软件上会关闭整个EDCⅢ系统。在这种情况下选择按钮上的LED灯熄灭,与运动模式程序接通时相同。在系统断电的情况下为使车辆可以继续安全行驶,减振阀转换至断电,即在硬模式下运行。车辆虽然处于很硬的减振状态,但是没有损失附着力还可以就近寻找维修站。
 09 转向角传感器
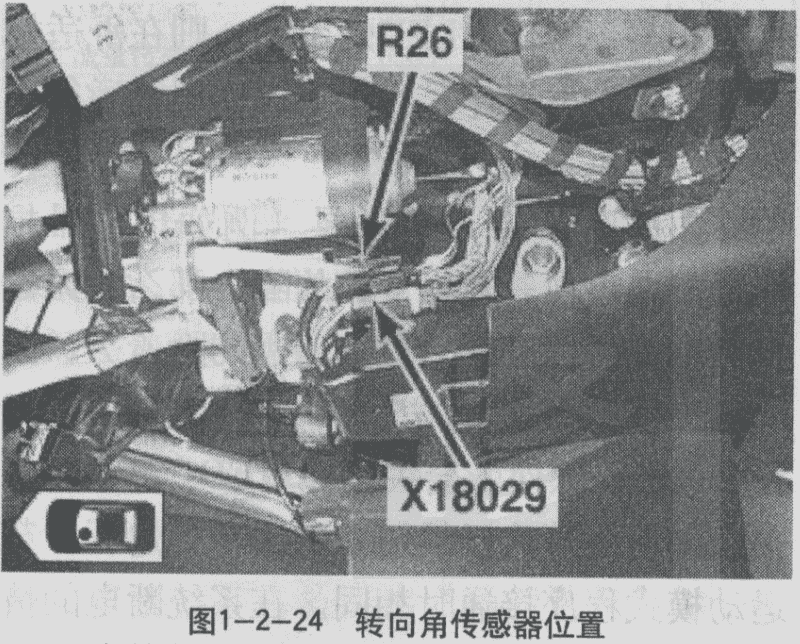
09-01 转向角传感器(图1-2-24)具有两个相互错开90°的电位计。由电位计测得的转向盘转角为转向盘旋转整一圈,即每隔±180°角度值会重复。转向角传感器对此进行识别并计算转向盘旋转圈数。因此,转向盘总转角由当前测得的转向盘转角和转向盘旋转圈数计算得出。
09-02 为使转向盘总转角随时可用,必须不间断地测量所有转向运动,包括在车辆处于静止状态时。为达到这一点,转向角传感器通过常电(蓄电池电压)持续供电。因而即使在点火开关关闭时,仍可测得转向运动。在点火开关断电后由电位计测得的转向角仍可供使用,但转向盘旋转圈数不记。
09-03 为使转向角传感器在断电后仍保持功能良好,传感器内集成了一个软件,它借助车轮转速(在一些车型上除了车轮转速外,还通过调节转向盘从一个极限位置转到另一个极限位置)来计算转向盘旋转圈数。这一过程称为圈数备用值计算过程。转向角传感器在这两种情况下无故障记录。
09 转向角传感器
09-01 转向角传感器(图1-2-24)具有两个相互错开90°的电位计。由电位计测得的转向盘转角为转向盘旋转整一圈,即每隔±180°角度值会重复。转向角传感器对此进行识别并计算转向盘旋转圈数。因此,转向盘总转角由当前测得的转向盘转角和转向盘旋转圈数计算得出。
09-02 为使转向盘总转角随时可用,必须不间断地测量所有转向运动,包括在车辆处于静止状态时。为达到这一点,转向角传感器通过常电(蓄电池电压)持续供电。因而即使在点火开关关闭时,仍可测得转向运动。在点火开关断电后由电位计测得的转向角仍可供使用,但转向盘旋转圈数不记。
09-03 为使转向角传感器在断电后仍保持功能良好,传感器内集成了一个软件,它借助车轮转速(在一些车型上除了车轮转速外,还通过调节转向盘从一个极限位置转到另一个极限位置)来计算转向盘旋转圈数。这一过程称为圈数备用值计算过程。转向角传感器在这两种情况下无故障记录。
 10 速度信号
10-01 EDC控制模块通过ABS系统从左前轮转速传感器获取车速信号。信号从该转速传感器传送至ABS控制模块,它再将信号传送到EDC控制模块。EDC控制模块接收到的车速信号为一个矩形波信号(0-12V)。根据对车辆行驶速度和转向轮角度的测量值,计算出相应的转弯速度/横向加速度。通过计算车辆速度的改变可取消纵向加速传感器。
11 前部加速传感器
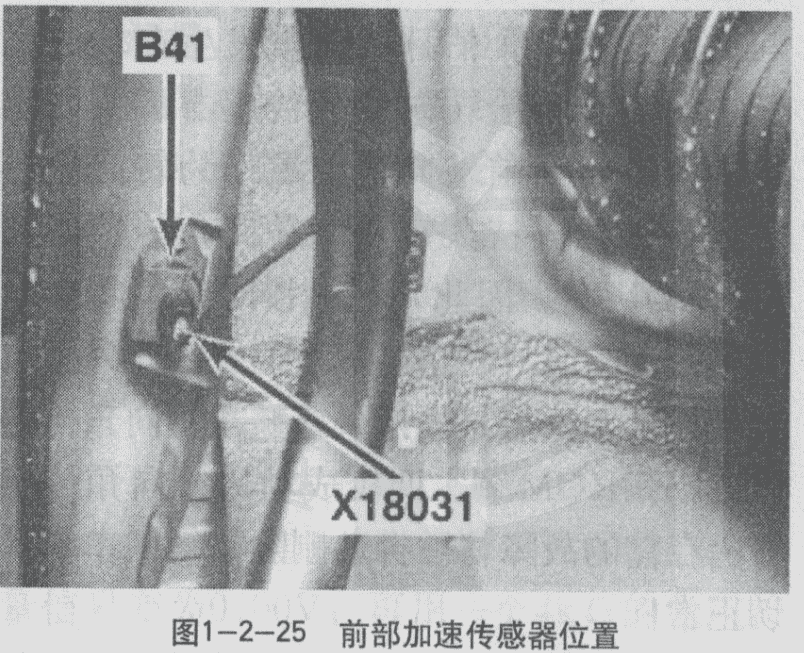
11-01 前部加速传感器(图1-2-25)在车前部沿垂直作用方向记录车身的加速度,车辆对路面的反应引起的车身加速度。除了绝对加速度还要感测加速度的加速频率,即加速度的变化情况(弹簧压缩/弹簧回跳)以及车身减振频率。加速传感器的电压为12V,由控制模块提供。传感器的信号输出端向控制模块输出的电压值在0-5V之间。此时2.5V表示静止位置(加速度为0),OV和5V为最大加速度值。
10 速度信号
10-01 EDC控制模块通过ABS系统从左前轮转速传感器获取车速信号。信号从该转速传感器传送至ABS控制模块,它再将信号传送到EDC控制模块。EDC控制模块接收到的车速信号为一个矩形波信号(0-12V)。根据对车辆行驶速度和转向轮角度的测量值,计算出相应的转弯速度/横向加速度。通过计算车辆速度的改变可取消纵向加速传感器。
11 前部加速传感器
11-01 前部加速传感器(图1-2-25)在车前部沿垂直作用方向记录车身的加速度,车辆对路面的反应引起的车身加速度。除了绝对加速度还要感测加速度的加速频率,即加速度的变化情况(弹簧压缩/弹簧回跳)以及车身减振频率。加速传感器的电压为12V,由控制模块提供。传感器的信号输出端向控制模块输出的电压值在0-5V之间。此时2.5V表示静止位置(加速度为0),OV和5V为最大加速度值。
 12 后部加速传感器
12-01 后部加速传感器(图1-2-26)用于感测车辆后部垂直方向上的加速度,车辆对路面的反应引起的车身加速。除了绝对加速度还要感测加速度的加速频率,即加速度的变化情况(弹簧压缩/弹簧加跳)以及车身减振频率。
12 后部加速传感器
12-01 后部加速传感器(图1-2-26)用于感测车辆后部垂直方向上的加速度,车辆对路面的反应引起的车身加速。除了绝对加速度还要感测加速度的加速频率,即加速度的变化情况(弹簧压缩/弹簧加跳)以及车身减振频率。
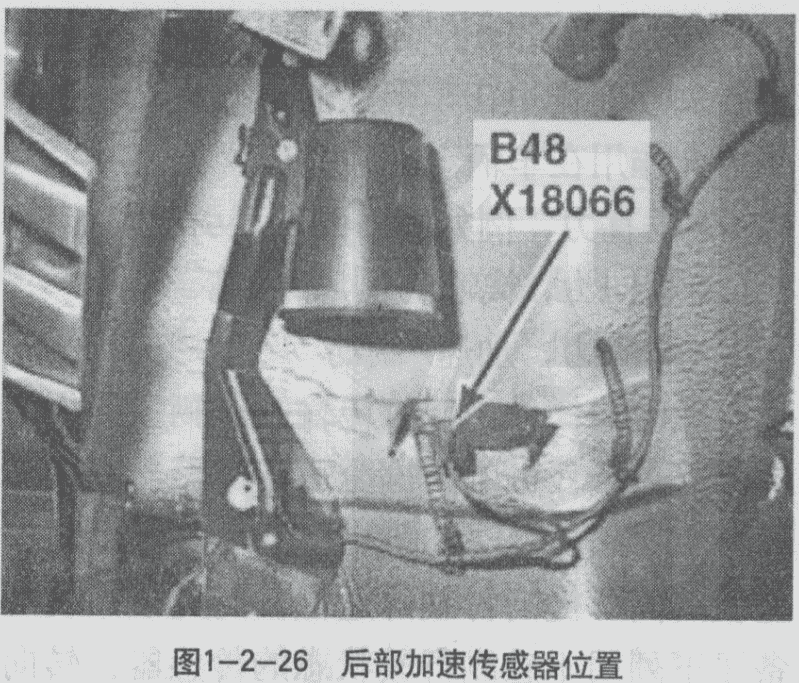 13 控制模块向加速传感器提供12V的电压。控制模块向传感器的信号输出端输出电压值为OV和5V的电压,此时2.5V表示静止位置(加速度为0),OV和5V为最大加速度值。
14 根据以上原理,EDCⅢ控制模块通过ABS系统从左前轮转速传感器获取车速信号。信号从该转速传感器传送至ABS控制模块,它再将信号传送到EDC控制模块。EDC 控制模块接收到的车速信号为一个矩形波信号(0-12V)。根据对车辆行驶速度和转向轮角度的测量值,计算出相应的转弯速度/横向加速度。通过计算车辆速度的改变可取消纵向加速传感器。可以看出横向加速度是根据车辆行驶速度和转向角度计算得出。而这辆车转向角在没调校归零前为+25°。车辆行驶后EDCⅢ就开始计算处理各种数据和信号,包括横向加速度信号。此车在直行状态因转向角为+25°,EDCⅢ识别为在转弯状态计算到横向加速度。为了防止侧翻,EDCⅢ把减振模式转换为硬模式,所以出现车主投诉减振器硬的故障。在下列操作之后必须进行零位调校:
14-01 更换转向角传感器。
14-02 更换D8C控制模块。
14-03 对转向角几何的设置操作。
14-04 对转向系和前桥执行操作 。
13 控制模块向加速传感器提供12V的电压。控制模块向传感器的信号输出端输出电压值为OV和5V的电压,此时2.5V表示静止位置(加速度为0),OV和5V为最大加速度值。
14 根据以上原理,EDCⅢ控制模块通过ABS系统从左前轮转速传感器获取车速信号。信号从该转速传感器传送至ABS控制模块,它再将信号传送到EDC控制模块。EDC 控制模块接收到的车速信号为一个矩形波信号(0-12V)。根据对车辆行驶速度和转向轮角度的测量值,计算出相应的转弯速度/横向加速度。通过计算车辆速度的改变可取消纵向加速传感器。可以看出横向加速度是根据车辆行驶速度和转向角度计算得出。而这辆车转向角在没调校归零前为+25°。车辆行驶后EDCⅢ就开始计算处理各种数据和信号,包括横向加速度信号。此车在直行状态因转向角为+25°,EDCⅢ识别为在转弯状态计算到横向加速度。为了防止侧翻,EDCⅢ把减振模式转换为硬模式,所以出现车主投诉减振器硬的故障。在下列操作之后必须进行零位调校:
14-01 更换转向角传感器。
14-02 更换D8C控制模块。
14-03 对转向角几何的设置操作。
14-04 对转向系和前桥执行操作 。







