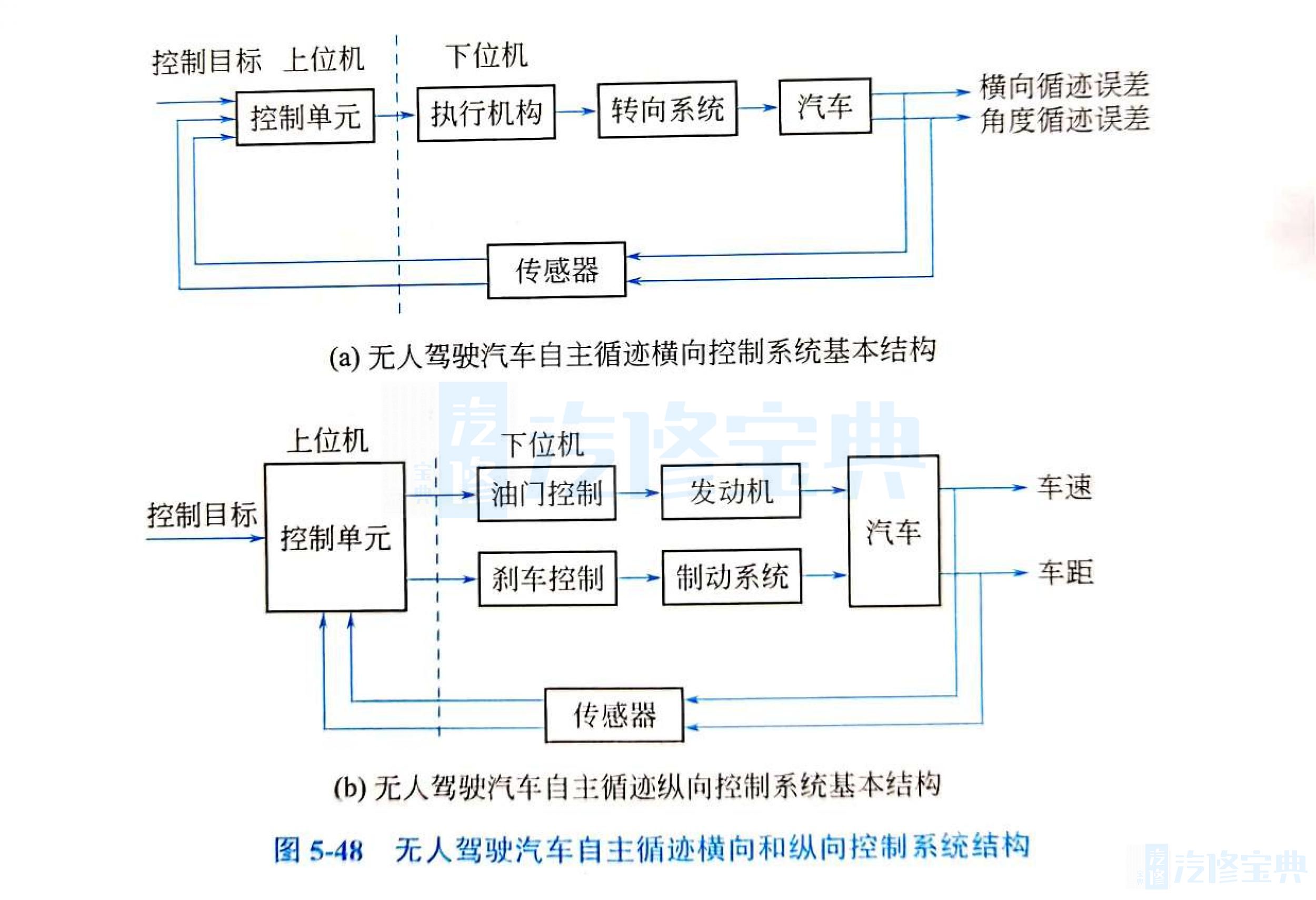
无人驾驶汽车自主循迹控制系统的主要任务包括任务规划、行为决策以及底层汽车操作。在实际应用中,汽车的自主循迹控制分为橫向控制和纵向控制。横向控制主要是通过控制转向盘转角使汽车沿期望的既定路线行驶,同时满足一定的舒适性和平顺性要求。纵向控制是行车方向上的控制,主要是通过控制汽车的油门和刹车使汽车按期望的车速行驶,同时实现与前后车车距的保持及紧急避障等功能。无人驾驶汽车自主循迹橫向和纵向控制系统结构如图5-48所示
可以看出,无人驾驶汽车横向控制系统的上位机控制单元通过汽车横向循迹误差和角度循迹误差信息计算出期望的转向盘转角,然后通过转向执行机构实现对转向系统的实时控制,进而实现对期望道路轨迹的跟踪。纵向控制系统的上位机控制单元通过期望车速和期望车距信息分别计算出期望油门踏板信号和制动踏板信号,然后通过执行机构实现对汽车发动机和制动系统的实时控制,使汽车始终保持期望的车速行驶,同时处于安全的车距范围内。