北斗卫星导航定位系统是中国自行研制开发的区域性有源三维卫星定位与通信系统,是继美国的GPS、俄罗斯的 GLONASS之后第三个成熟的卫星导航定位系统。北斗卫星导航定位系统致力于向全球用户提供高质量的定位、导航和授时服务,其建设与发展则遵循开放性、自主性、兼容性、渐进性这4项原则。 一、北斗卫星导航定位系统的组成。 北斗卫星导航定位系统由空间段、地面段和用户段三部分组成,如图6-5所示。
空间段包括5颗静止轨道卫星和30颗非静止轨道卫星;地面段包括主控站、注入站和监测站等若干个地面站;用户段由北斗用户终端以及与美国GPS、俄罗斯的 GLONASS、欧洲的 GALILEO等其他卫星导航系统兼容的终端组成。
二、北斗卫星定位原理。
北斗一代和北斗二代定位系统都是采用伪距法进行导航定位。该方法的基本定位思想是三球交汇定位原理。北斗一代系统由于其观测量较少并且其工作方式是有源定位,使得北斗一代与北斗二代在定位原理和精度有所不同。
1.北斗一代卫星定位原理。
北斗一代卫星导航定位系统的定位原理是基于三球交汇原理进行定位,以两颗卫星的已知坐标为球心,两球心至用户的距离为半径,可画出两个球面,用户机必然位于这两个球面交线的圆弧上。另一个球面是以地心为球心,画出以用户所在位置点至地心的距离为半径的球面,三个球面的交汇点即为用户位置。
由上述原理可得,地面中心到双星的两个伪距分别为:
式中,P1、P2分别是第一个和第二个伪距观测量;S1、S2分别是地面中心至双星距离;R1、R2分别是用户设备至双星距离;△t1、△t2分别是在地面中心的电文经过两个卫星及用户之间时间偏差。
S1、S2和地面中心站的坐标都是已知的,即S1(x1,y1,z1)、S2(x2,y2,z2)和(x0,y0,z0)。设接收机坐标为(x,y,z),则:
式中,i=1,2。
将式(6-12)和(6-13)代入式(6-10)和(6-11)中,可以求得用户坐标的三个未知量的两个方程。此时需要用到用户所处位置的高程值来解算用户位置。
设该高程值为H,则:
2.北斗二代卫星定位原理。
北斗二代是典型的RNSS系统。北斗二代系统定位原理与GPS类似,至少需要4颗卫星,其伪距为:
式中,Pi是第i颗卫星的伪距;x=[xu,yu,zu,△t]为所要求解的变量:xu=[xu,yu,zu]为接收机位置;△t为卫星时钟的钟差;[xsi,ysi,zsi]是定位卫星的位置;ni是卫星各个观测量的伪距误差;i=1,2,3,4。
求解式(6-15)即可得到用户位置。
三、北斗卫星导航定位系统的功能。
北斗卫星导航定位系统具有以下功能。
(1)短报文通信北斗系统用户终端具有双向报文通信功能,用户可以一次传送40~60个汉字的短报文信息。
(2)精密授时北斗系统具有精密授时功能,可向用户提供20~100ns时间同步精度。
(3)定位精度水平精度100m(1a),设立标校站之后为20m(类似差分状态);工作频率为2491.75MHz。
(4)最大用户数每小时540000户。
北斗卫星导航定位系统可在全球范围内全天候、全天时为各类用户提供高精度、高可靠定位、导航、授时服务,并具有短报文通信能力,已经初步具备区域导航、定位和授时能力。
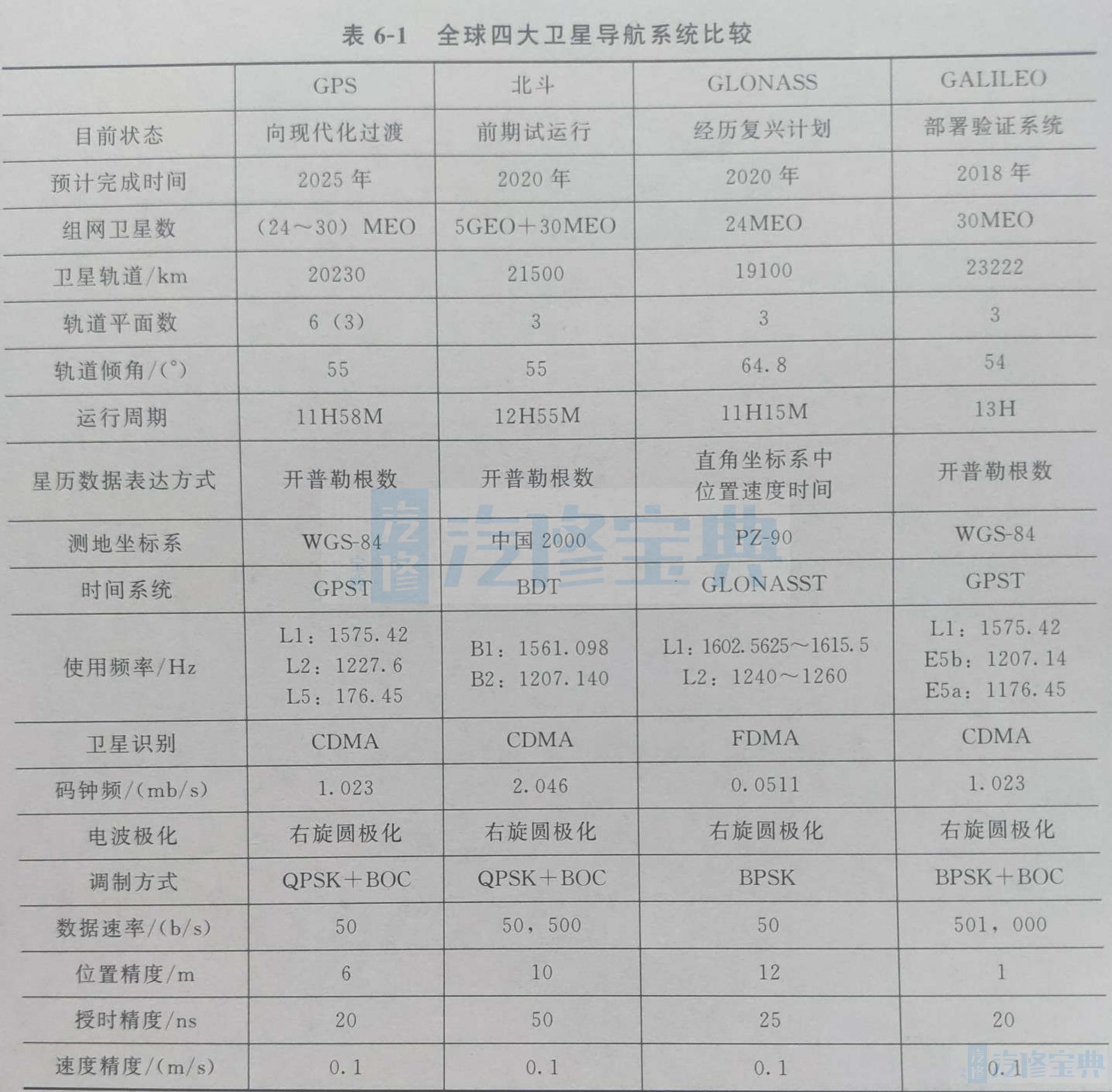
全球四大卫星导航系统比较见表6-1。