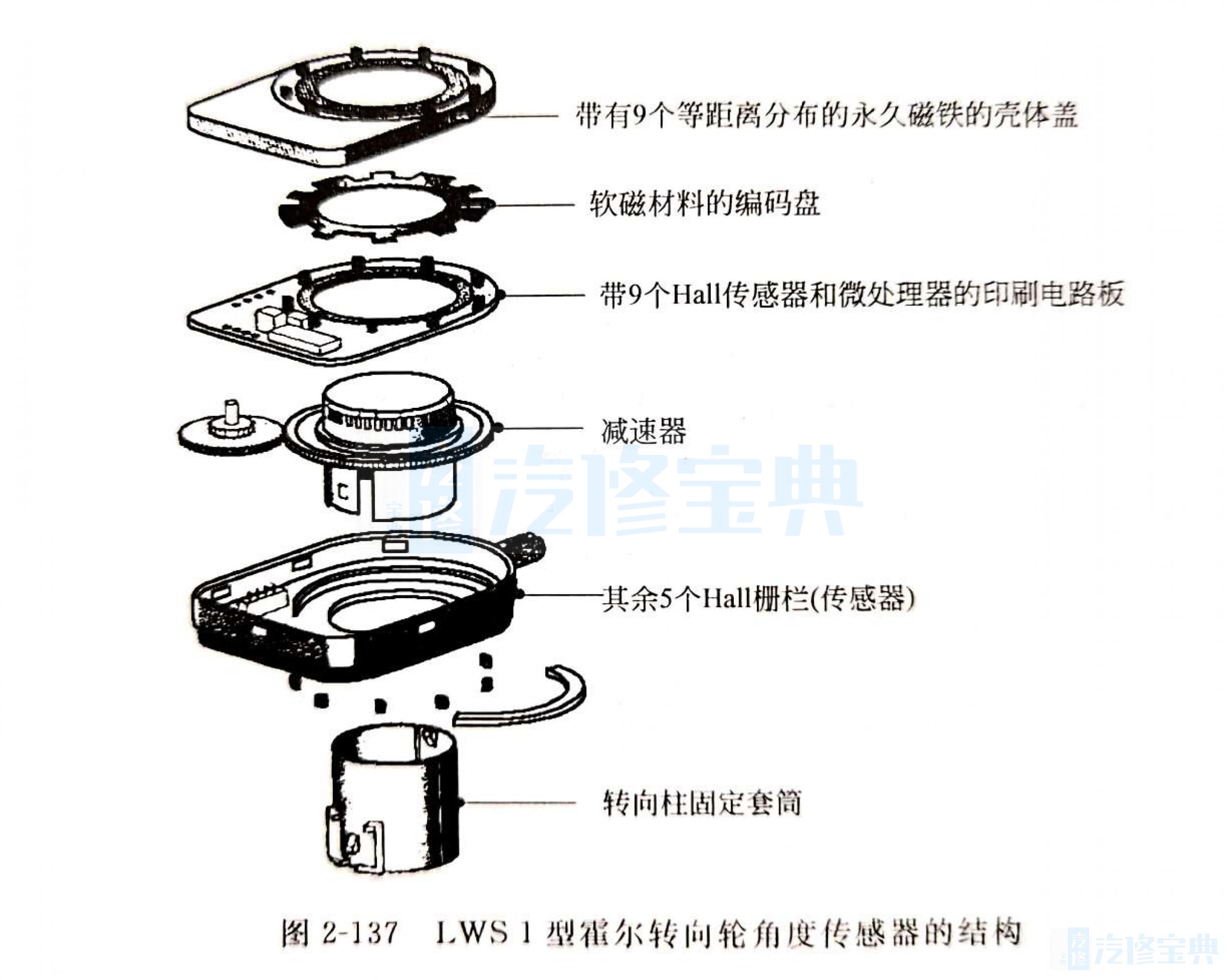
1.转向轮角度传感器的作用。 转向轮角度传感器主要应用在电子稳定控制系统中,该系统的任务是在制动作用下将汽车保持在驾驶员设定的行驶道路上。在控制单元中将转向轮调整角度和给定的制动压力与汽车实际的转向和行驶速度进行比较,必要时制动车轮。这样不仅保证车轴与转向的偏差,还可防止不希望的过度转向,保证适度的不足转向电子稳定控制系统中的角度传感器主要有两个作用:一是用于检测转向轮角度,二是用于检测传感器测量的可信度或者在理想情况下还可自诊断,常用的转向轮角度传感器有电位器式、光代码式和磁电式三种。 2.转向轮角度传感器的结构与工作原理。 在 Bosch电子稳定控制系统的电控单元配用的有两种测量绝对角度的电磁式角度传感器。它们可在任何时间,在整个角度范围内测出转向轮角度。 LWS 1型Hall转向轮角度传感器有14个霍尔“栅栏”(传感器)检测角度和转向轮的转动,如图2137所示。1个霍尔栅栏(传感器)都像1个光栅;1个霍尔传感器检测相邻磁铁的磁场。磁场由于被与转向柱一起转动的金属编码盘阻挡而大为减弱,甚至屏蔽。这样,9个霍尔传感器得到转向轮角度的编码(数字)信息,剩下的5个Hal传感器记录转向轮的转动。通过4:1的减速比,将该转动变为360°,即4转变1转。
从LWS1型转向轮角度传感器结构图可知,上面9个磁铁,根据转向轮转向位置,被放在它下面的软磁材料的编码盘逐个屏蔽。在印刷电路板上有霍尔传感器和微处理器。在微处理器中可检测传感器的可信度,并对检测的角度进行译码,并为CAN总线传输数据作准备。LWS1型转向轮角度传感器的下半部分是减速器和5个“栅栏”(传感器)。LWS1型转向轮角度传感器因为元件众多,需等距离安装磁铁及对准,而被“LWS3”型转向轮角度传感器代替为使成本更便宜,LWS4型转向轮角度传感器代替了LWS3,提高ESP系统的安全性。