车载毫米波雷达根据测量原理的不同,一般分为脉冲方式和调频连续波方式两种。 脉冲方式测量原理简单,但由于受技术、元器件等方面的影响,实际应用中很难实现。采用脉冲方式的毫米波雷达需在很短的时间(一般都是微秒的数量级)内发射大功率的信号脉冲,通过脉冲信号控制雷达发射装置发射出高频信号,因此在硬件结构上比较复杂,成本高。除此之外,在高速路上行驶的车辆,其回波信号难免会受到周围树木、建筑物的影响,使回波信号衰减,从而降低接收系统
的灵敏度。同时,如果收发采用同一个天线时,在对回波信号进行放大处理之前,应将其与发射信号进行严格的隔离,否则会因为发射信号的窜入,导致回波信号放大器饱和或者损坏。为了避免发射信号窜入接收信号中,需进行隔离技术处理,通常情况下,采用环形器或者使用不同的天线收发以避免发射信号的窜入,但这样就导致硬件结构的复杂性增加,产品成本高。故在车用领域,脉冲测量方式运用较少。
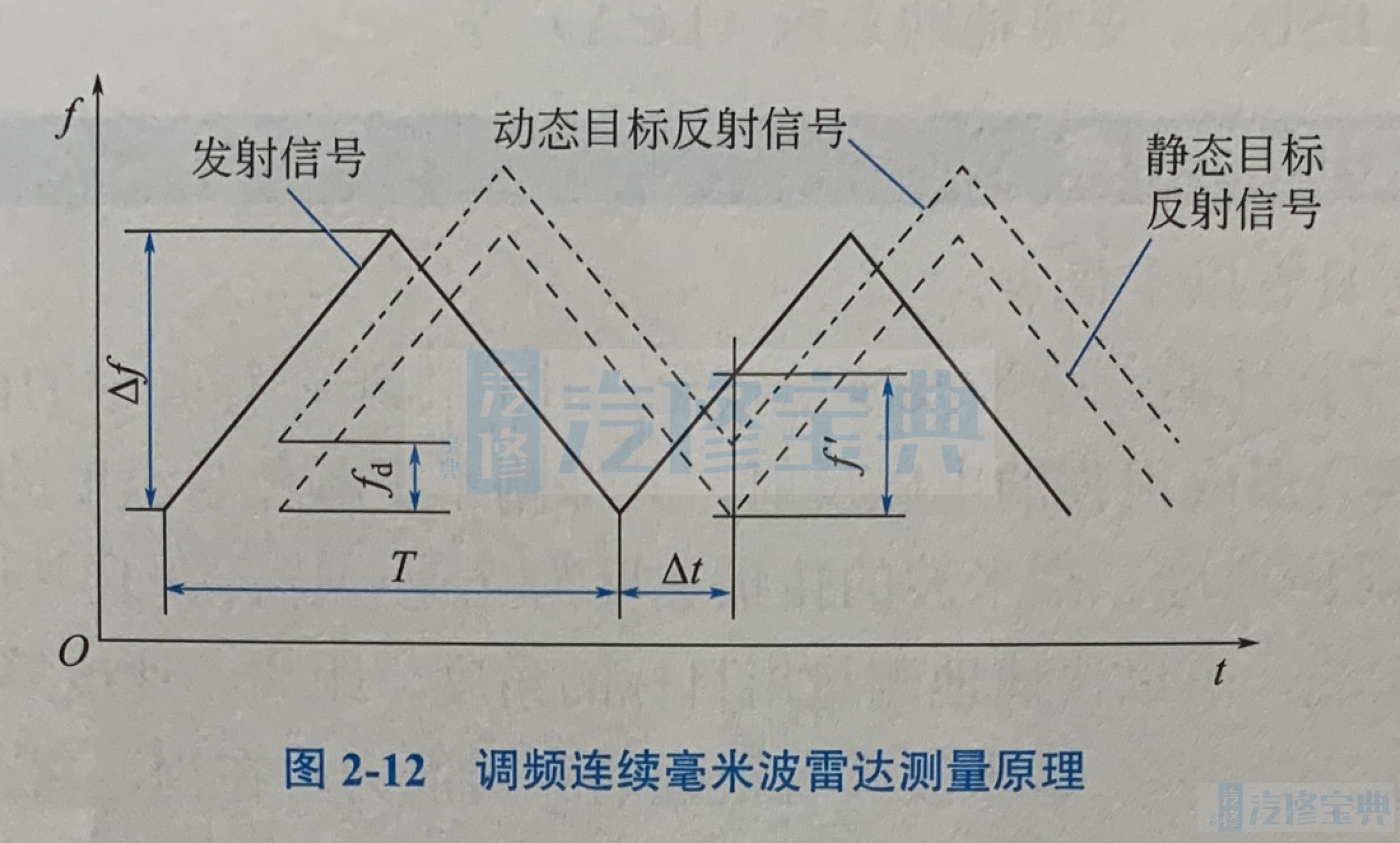
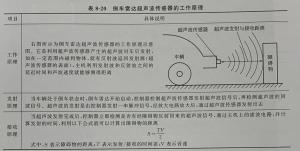
目前,大多数车载毫米波雷达都采用调频连续波方式,其测量原理如图2-12所示。
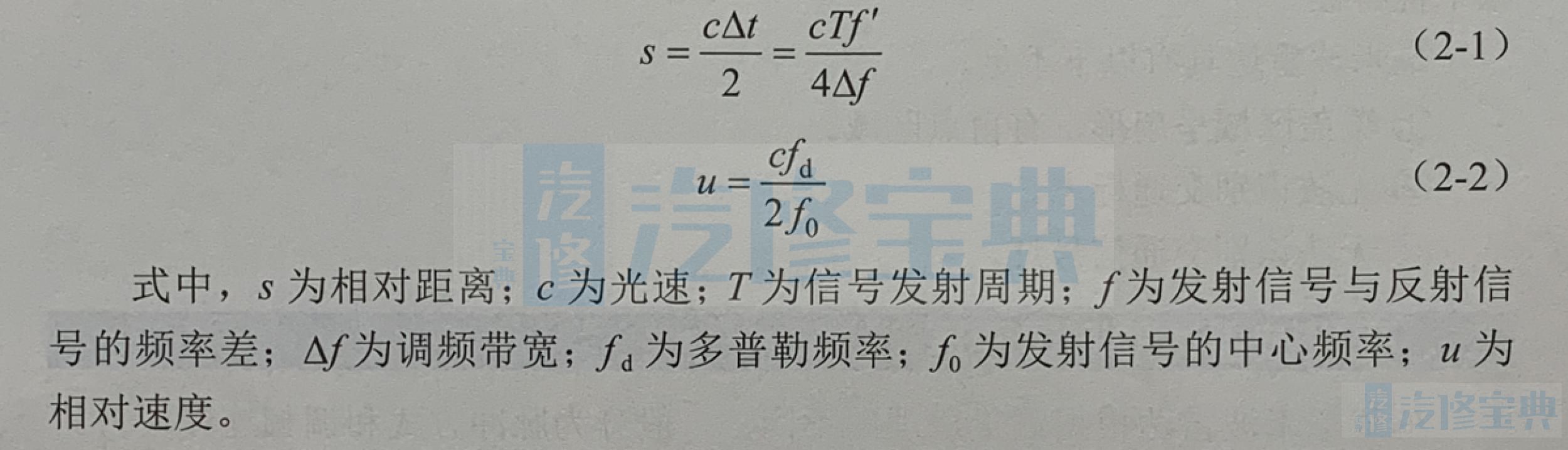
采用调频连续波方式的毫米波雷达结构简单,体积小,可以同时得到目标的相对距离和相对速度。它的基本原理是当发射的连续调频信号遇到前方目标时,会产生与发射信号有一定延时的回波,再通过雷达的混频器进行混频处理,混频后的结果与目标的相对距离和相对速度有关。毫米波雷达测距和测速的计算公式为
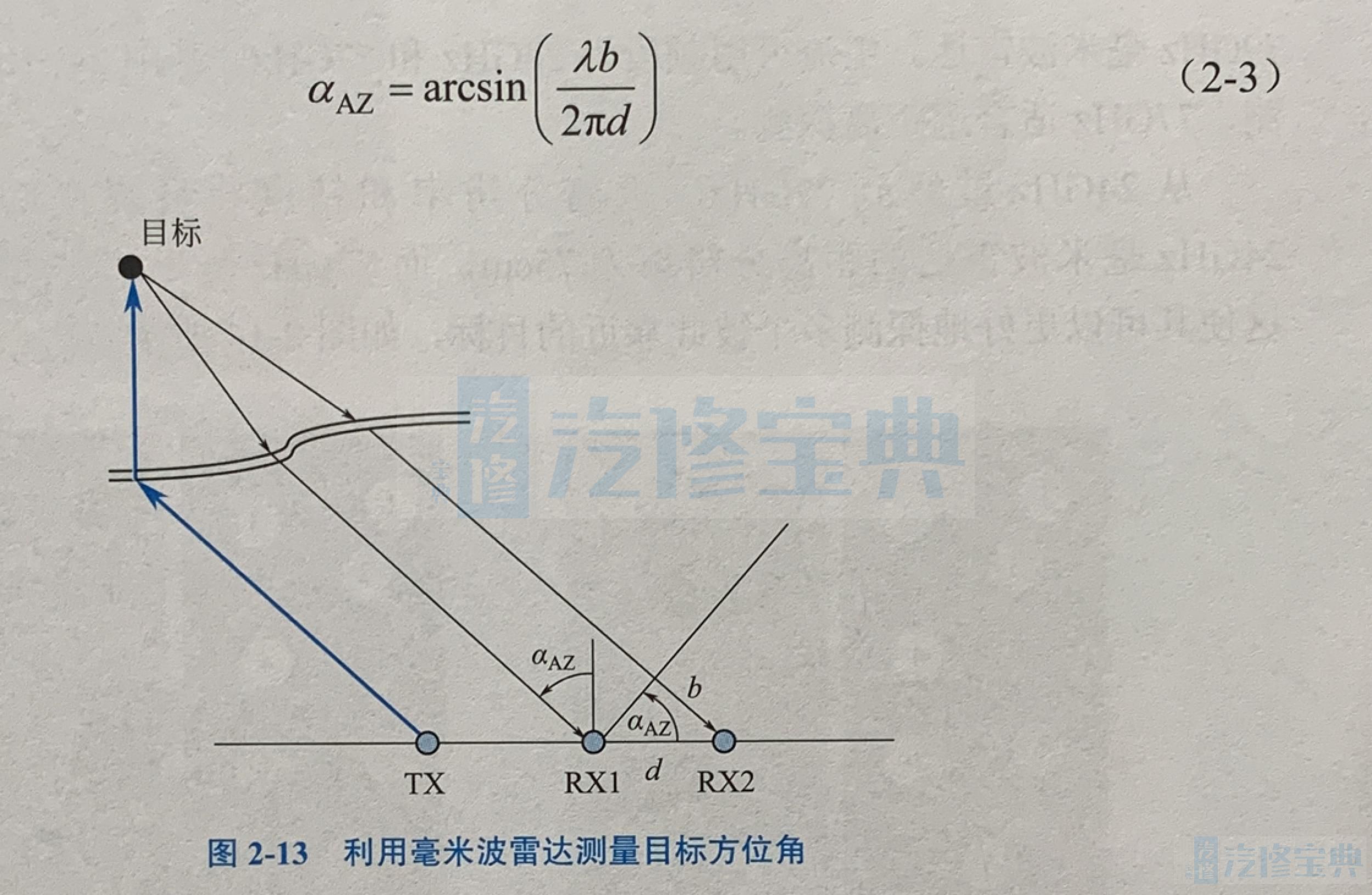
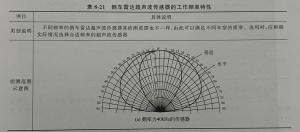
通过毫米波雷达的发射天线发射出毫米波信号后,遇到被监测目标反射回来,通过毫米波雷达并列的接收天线,通过收到同一监测目标反射信号的相位差,就可以计算出被监测目标的方位角。方位角测量原理如图2-13所示。毫米波雷达发射天线TX向目标发射毫米波,两个接收天线RX1和RX2接收目标反射信号。毫米波雷达接收天线RX1和接收天线RX2之间的几何距离为d,两个毫米波雷达天线所收到反射回波的相位差为b,然后通过三角函数计算得到方位角αAZ的值,就可以知道被监测目标的方位角。
由于毫米波雷达具有监测目标的位置、速度和方位角的优势,再结合毫米波雷达较强的抗干扰能力,可以全天候全天时稳定工作,因此,毫米波雷达是智能网联汽车核心传感器之一。