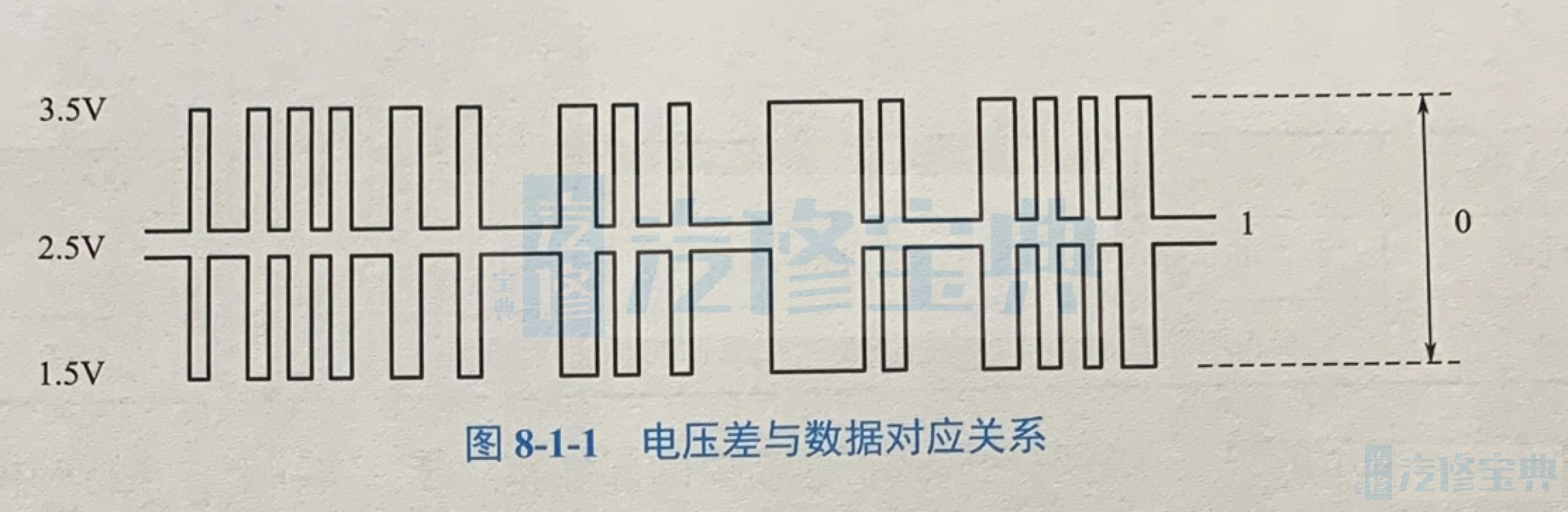
CAN是 Controller Area Network的缩写,全称是控制器局域网络总线,即控制设备相互连接,进行数据交换。它是国际上应用最广泛的现场总线之一,被设计为汽车环境中的微控制器通信总线,在各电子控制单元(ECU)之间交换信息,形成汽车电子控制网络。 LIN是用于汽车分布式电控系统的一种新型低成本串行通信系统,主要用于智能传感器和执行器的串行通信。LIN总线的特点:基于UART的数据格式;单主多从结构;单线传输(0~12V);通信速率为19.2KbpsCAN总线的通信介质是双绞线,其中高速CAN总线的通信速率为500Kbps。双绞线终端为两个120Ω的电阻。 高速CAN总线是差分总线,高速CAN总线串行数据总线H和高速CAN总线串行数据总线L从静止或闲置电平驱动到相反的极限,大约为2.5V的闲置电平被认为是隐性传输数据并解释为逻辑1。将线路驱动至极限时,高速CAN总线串行数据总线H将升高1V而高速CAN总线串行数据总线L将降低1V。极限电压差2V被认为是显性传输数据并解释为逻辑0如图8-1-1所示。
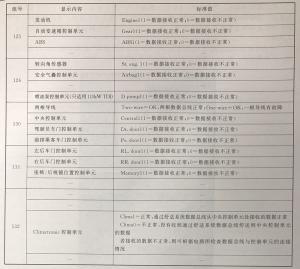
发送CAN信号时,电流从控制器的发送端流到CANH线,经过终端电阻流入CANL线再返回控制器的接收端。如果通信信号丢失,程序将针对各控制模块设置失去通信故障码。
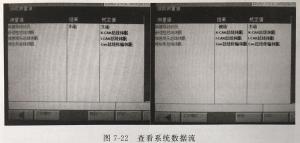
该故障码可被故障诊断仪读取。