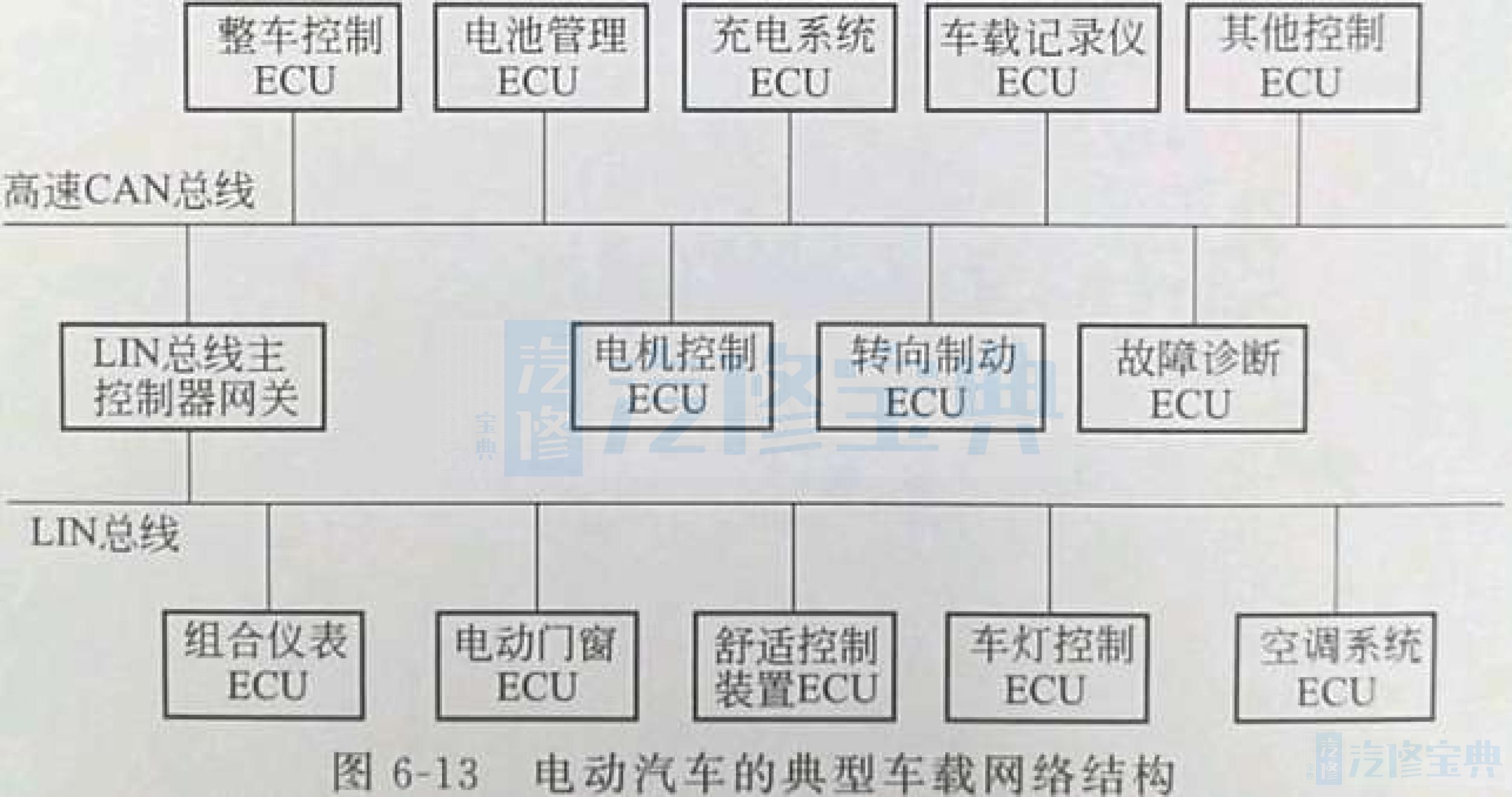
电动汽车各种电气设备的工作由整车车载网络系统协调控制,如图6-13所示为电动汽车的典型车载网络结构。 1.整车CAN总线电动汽车CAN总线系统由整车控制器、电池管理系统、电动机控制系统、制动控制系统、仪表控制系统组成。各个控制器之间通过CAN总线进行通信,以实现传感器测量数据的共享、控制指令的发送和接收等,并使各自的控制性能都有所提高,从而提高系统的控制性能。它们之间的通信与信息类型为信息类和命令类。信息类主要是发送一些信息,如传感器信号、诊断信息、系统的状态。命令类则主要是发送其他执行器的命令。 CAN总线作为一种有效支持分布式控制或实时控制的串行通信网络完全能够满足这些要求,其模型结构只有三层,即物理层、数据链路层和应用层。传输介质为双绞线,通信速率最高可达1Mbit/s(40m),直接传输距离最远可达10km(5kbit/s),可挂接设备数最多可达110个。CAN通信协议规定了四种不同的帧格式,即数据帧、远程帧、错误帧和超载帧。基于下列五条基本规则进行通信协调:总线访问;仲裁;编码/解码;出错标注;超载标注。
2.整车CAN总线网关及网络化管理在整车的网络管理中,整车控制器是信息控制的中心,负责信息的组织与传输,网络状态的监控,网络节点的管理,信息优先权的动态分配,以及网络故障的诊断与处理等功能通过CAN( EVBUS)线协调电池管理系统、电动机控制器、空调系统等模块相互通信。