脚部空间模块(FRM)控制外部照明和车内照明。也就是说,所有照明功能都已集成到脚部空间模块中。 脚部空间模块还控制外后视镜(通过LIN控制后视镜调节、翻折、记忆功能、后视镜加热和防眩)以及前部车窗升降机驱动装置(驾驶员侧和前乘客侧)。 此外,脚部空间模块还是仪表板的接口。 根据所选的照明功能(例如外部照明),直接由脚部空间模块或根据脚部空间模块的要求控制相应的组件。脚部空间模块把控制相应步进电动机的要求通过LIN总线输出到大灯
驱动器模块。
根据车辆装备情况,自适应转向大灯功能和可变光分布功能已完全集成在脚部空间模块中。脚部空间模块连续通过KCAN2读取信号,并由此计算出自适应大灯光线水平调整的当前值。
体式底盘管理系统(ICM)为脚部空间模块提供动态大灯光线水平调整的值。
外部照明的所有灯泡都由脚部空间模块监控。监控包括接通和关闭的灯泡(只在接通状态下监控发光二极管)。自总线端K1.15接通起开始监控。
所有照明功能(附加制动信号灯和发光二极管除外)都由脚部空间模块通过一个按脉冲宽度调制的信号(PWM信号)供电。通过这个按脉冲宽度调制的信号,外部照明能够保持相同的亮度。
灯开关通过LIN总线与脚部空间模块连接。
制动信号灯开关通过一条导线直接与脚部空间模块连接。脚部空间模块还通过K-CAN从动态稳定控制系统(DSC)接收总线信号。总线信号包含关于制动减速度变化过程以及DSC调节特性的信息。脚部空间模块分析这些数据,并自总线端K1.R接通起控制制动信号灯。
根据国家规格,使用两级制动信号灯或动态制动信号灯。
脚部空间模块用于车内照明的所有输出端都按脉冲宽度调制。这样就能实现尽管电压扰动但车内照明灯保持相同的亮度。
脚部空间模块收到大量打开车内照明灯的输入信号。这些输入信号由脚部空间模块直接读取或通过K-CAN2接收(输入信号例如车内照明灯按钮已按压、车门已打开、通过遥控器解锁)在打开外部照明时,脚部空间模块通过K-CAN、LIN以及常规布线提供总线端K1.58g查寻照明)。未调暗功能照明灯的亮度,将以最高亮度打开。
脚部空间模块为脚部空间照明灯、登车照明灯和前景照明灯供电。
此外,脚部空间模块还监控车门触点的状态。在打开车门时,脚部空间模块识别车门触点的状态变化并接通车内照明灯。
一旦闪烁报警按钮被按下,脚部空间模块就以全部亮度接通闪烁报警的照明。在总线端K1.58g接通时,闪烁报警不以全部亮度照明。此亮度取决于查寻照明的设置。
自总线端K1.15断开起,脚部空间模块在几分钟(例如8min)后关闭车内照明灯。为此,脚部空间模块通过K-CAN2输出用电器断开信息。
驾驶员侧车门开关组通过LIN总线向脚部空间模块发送按钮信号。脚部空间模块检测按钮信号并进行分析。接线盒电子装置把前乘客侧车门中车窗升降机开关的要求作为信息在K-CAN2上发送至脚部空间模块。
根据信号分析结果,脚部空间模块对前部车窗升降机(驾驶员侧车窗升降机驱动装置和前乘客侧车窗升降机驱动装置)进行电动控制并监控其功能。在脚部空间模块中安装有前车门车窗升降电动机的继电器。
为了控制车窗升降电动机,在脚部空间模块中进行调节电流的集成测量。此测量用于故障识别(例如过电流、短路或锁止)。如果高于或低于规定的阈值,则断开相关车窗升降电动机的供电。
为了防止车窗升降电动机过热,在脚部空间模块中有一项专用过热保护功能。在脚部空间模块中根据运转时数(运行时间和休眠阶段)通过一个热模型不间断地计算车窗升降电动机的温升。至一个规定的温度界限时,脚部空间模块断开相关的车窗升降电动机。
后视镜加热装置由脚部空间模块控制。相应的信息通过LIN总线转发至后视镜中的电子分析装置。如果后视镜有记忆功能,则脚部空间模块通过个人设置存储后视镜的记忆功能位置。
脚部空间模块分析转向柱调整装置开关的按钮信号。脚部空间模块根据要求控制和监视两个转向柱调整电动机的功能。调整位移可通过调整电动机中的霍尔传感器记录并在脚部空间模块中处理。
为了控制调整电动机,在脚部空间模块中进行调节电流的集成测量。此测量用于故障识别(例如过电流、短路或锁止)。如果高于或低于规定的阈值,则断开相关调整电动机的供电。
为了防止转向柱调整电动机过热,在脚部空间模块中有一项专用过热保护功能。在脚部空间模块中根据运转时数(运行时间和休眠阶段)通过一个热模型不间断地计算调整电动机的温升。至一个规定的温度界限时,脚部空间模块断开相关的调整电动机。
脚部空间模块分析车门触点的状态。脚部空间模块读取驾驶员侧车门锁芯的霍尔传感器信息。脚部空间模块通过K-CAN2转发信息,例如发送至接线盒电子装置(JBE)或便捷进入及启动系统(CAS)。
通过车辆任务可具体匹配脚部空间模块的参数。
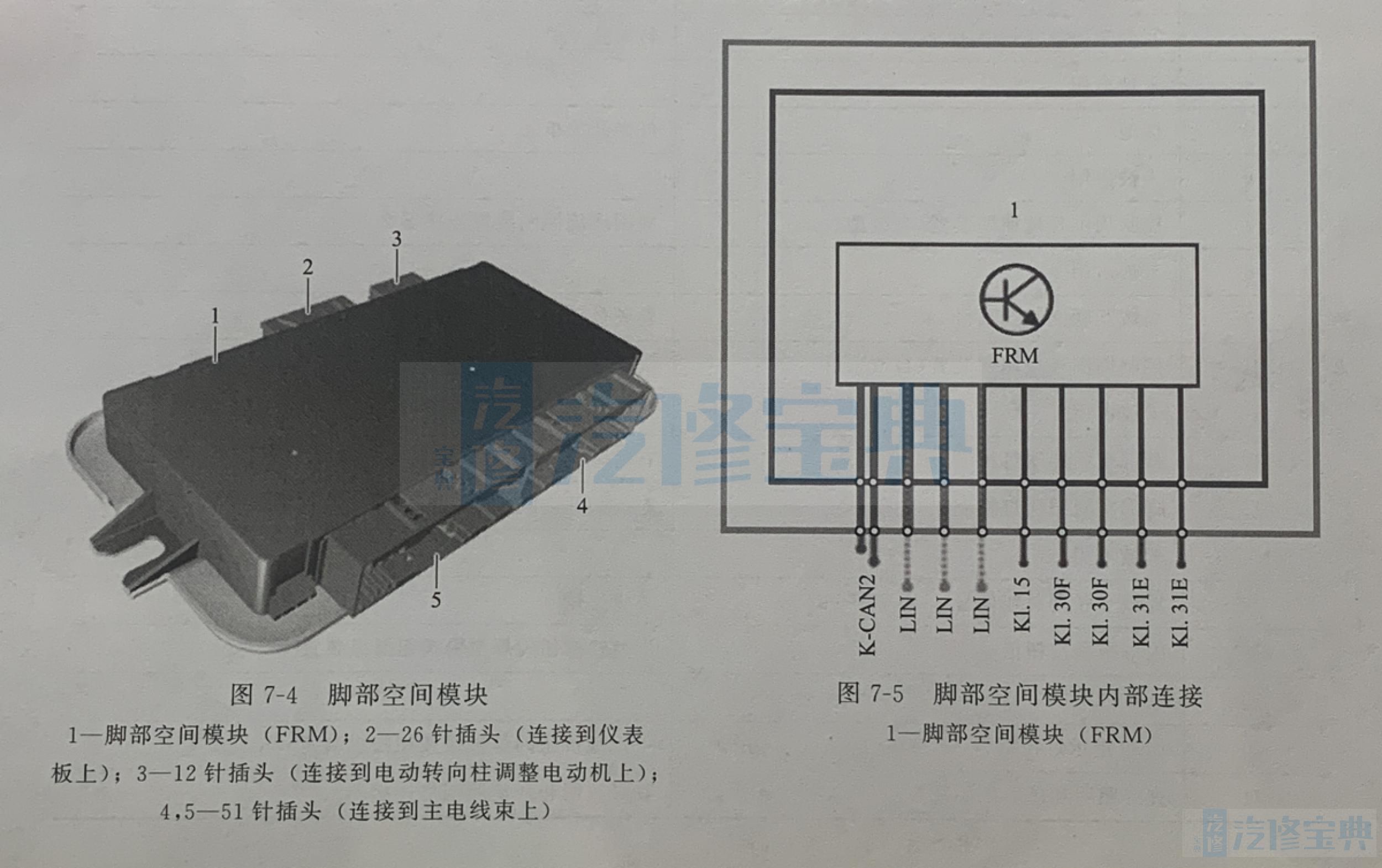
脚部空间模块可通过下列信号唤醒:CAN总线激活、总线端K1.15接通、闪烁报警按钮接通、车门触点或车门锁触点的状态变化、防盗报警系统的报警、灯开关已操纵。脚部空间模块如图7-4所示。
脚部空间模块通过多个插头连接到车辆上。两个51针插头连接主电线束。其中一个26针插头用于连接仪表板。为了电动调节转向柱,脚部空间模块通过12针插头与调整电动机连接。接线盒中的配电器和后部配电器通过总线端K1.30F为脚部空间模块供电。CAS通过总线端K1.15为脚部空间模块供电。FRM模块内部连接如图7-5所示。
在与脚部空间模块的通信失灵时,进行标准检测(整体测试模块)。存在某个控制单元内部故障时,预计岀现以下情况:脚部空间模块内出现故障码存储记录。