超声波雷达的主要生产商有博世、法雷奧、村田、尼塞拉、电装、三菱、松下、同致电子、航盛电子、豪恩、辉创、上富、奥迪威等智能网联汽车上常见的超声波雷达有两种:第一种是安装在汽车前后保险杠上的,也就是用于探测汽车前后障碍物的传感器,测量距离一般为0.15~2.50m,称为驻车辅助传感器(UPA);第二种是安装在汽车侧面的,用于测量停车位长度的超声波雷达,测量距离一般为0.3~5.0m,称为泊车辅助传感器(APA)。
博世公司第6代超声波雷达如图2-5所示。
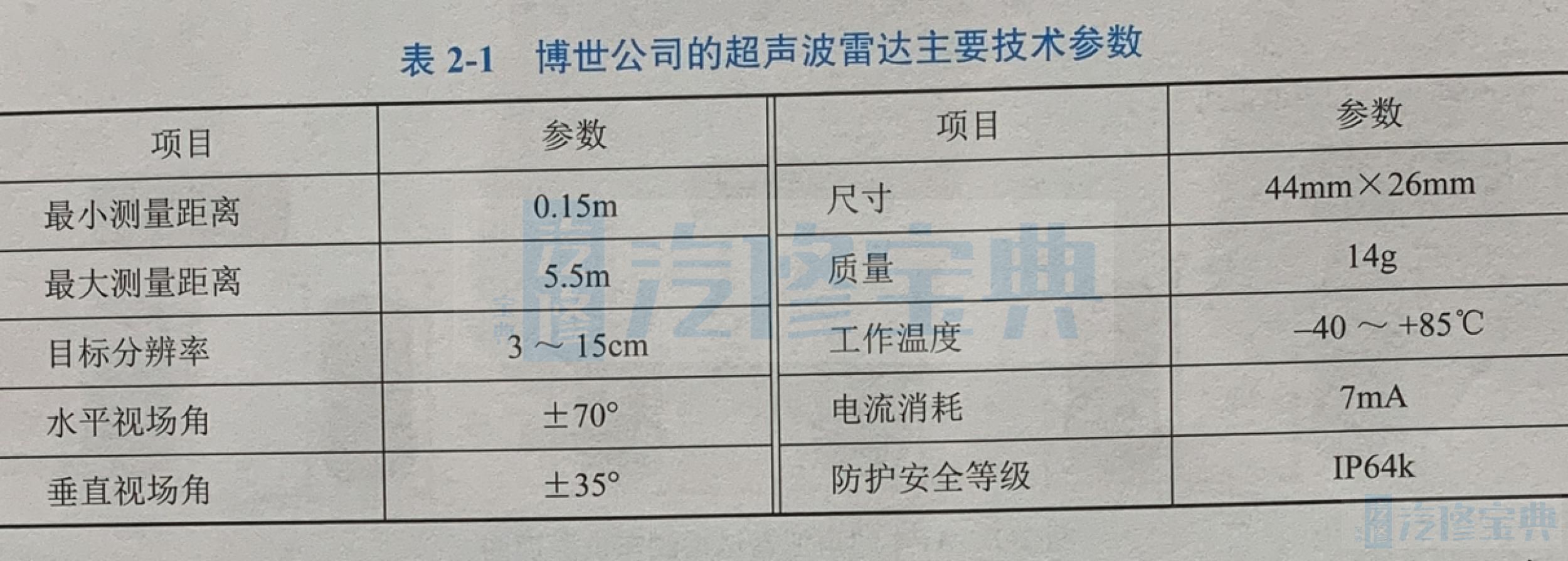
博世公司的超声波雷达主要技术参数见表2-1
超声波雷达主要用于泊车系统。泊车系统可以分为自动泊车、远程遥控泊车、自学习泊车和自动代客泊车。
1.自动泊车自动泊车是最常见的泊车辅助系统。泊车辅助系统在汽车低速巡航时,使用超声波雷达感知周围环境,帮助驾驶员找到大小合适的空车位,并在驾驶员发送泊车指令后,将汽车泊入车位。
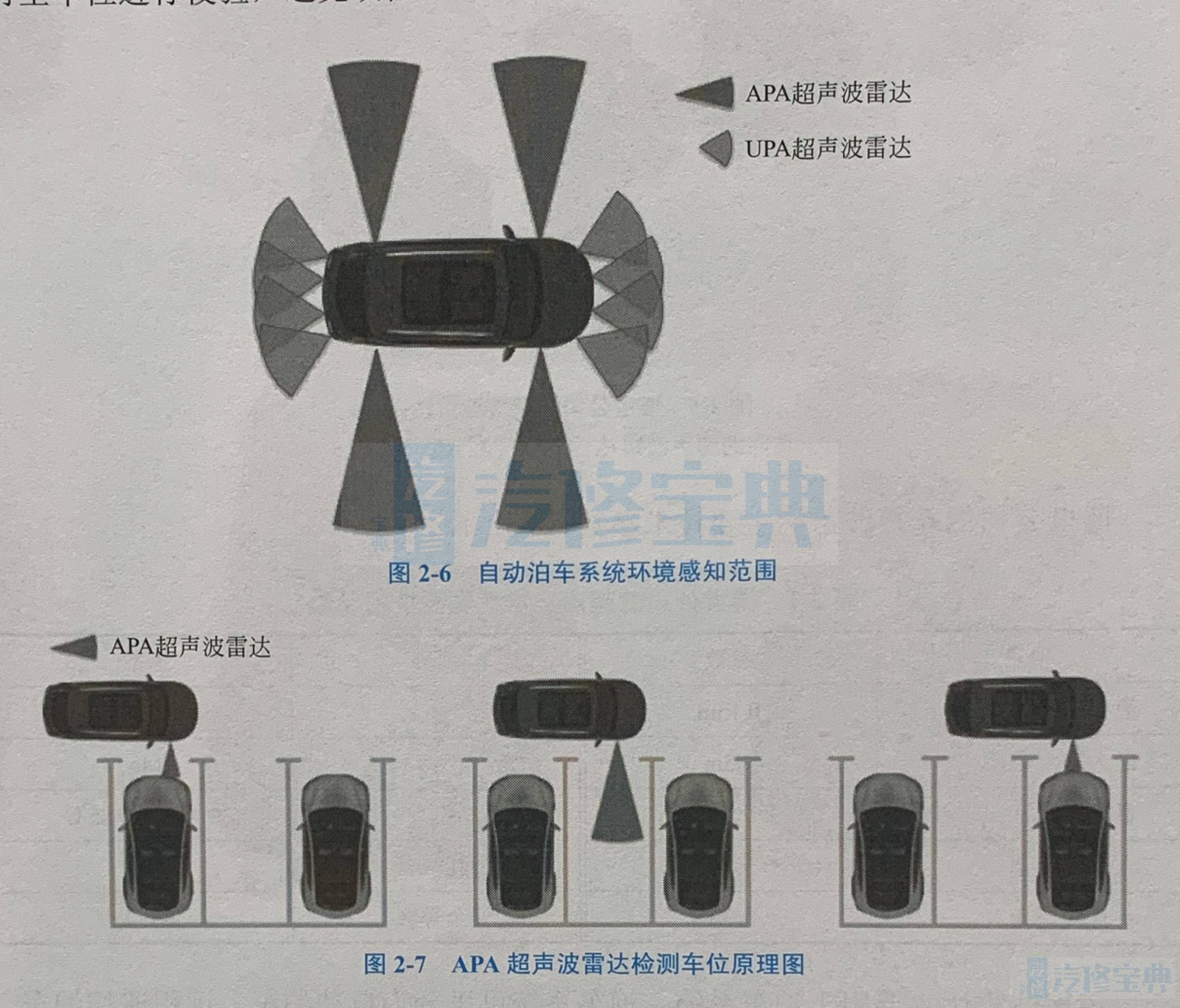
自动泊车系统使用的传感器包括8个安装于汽车前、后的UPA超声波雷达和4个安装于汽车两侧的APA超声波雷达,雷达的感知范围如图2-6所示。
APA超声波雷达的探测范围远而窄,常见APA最远测量距离为5m;UPA超声波雷达的探测范围近而宽,常见的UPA测量距离为3m。不同的探测范围决定了它们不同的分工。APA超声波雷达的作用是在汽车低速巡航时,完成空车位的寻找和校验工作。如图2-7所示,随着汽车低速行驶过空车位,安装在前侧方的APA超声波雷达的测量距离有一个先变小,再变大,再变小的过程。一旦汽车控
制器探测到这个过程,可以根据车速等信息得到车位的宽度以及是否是空车位的信息。后侧方的APA在汽车低速巡航时也会探测到类似的信息,可根据这些信息对空车位进行校验,避免误检。
使用APA超声波雷达检测到空车位后,汽车控制器会根据自车的尺寸和车位的大小,规划出一条合理的泊车轨迹,控制方向盘、变速箱和油门踏板进行自动泊车。在泊车过程中,安装在汽车前后的8个UPA会实时感知环境信息,实时修正泊车轨迹,避免碰撞。
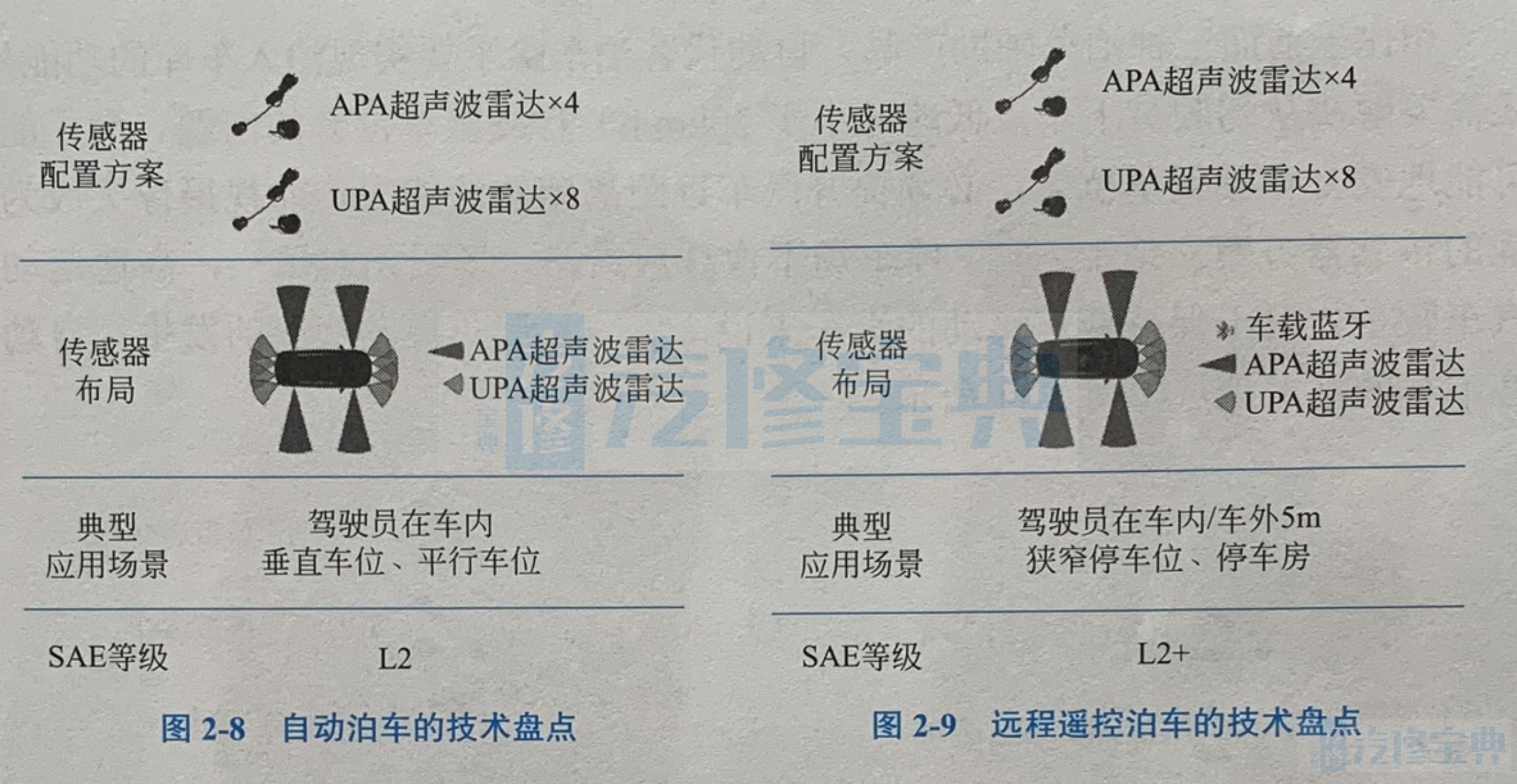
APA自动泊车辅助系统需要驾驶员在车内实时监控,以保证泊车顺利完成,属于SAEL2级别的自动驾驶技术。
自动泊车的技术盘点如图2-8所示。
2.远程遥控泊车远程遥控泊车辅助系统是在自动泊车技术的基础之上发展而来的,车载传感器的配置方案与自动泊车类似。它解决了停车后难以打开自车车门的尴尬场景,比如在两边都停了车的车位,或在比较狭窄的停车房。远程遥控泊车辅助系统常见于特斯拉、宝马7系、奥迪A8等高端车型中。
在汽车低速巡航并找到空车位后,驾驶员将汽车挂入停车挡,就可以离开汽车了。在车外,使用手机发送泊车指令,控制汽车完成泊车操作。遥控泊车涉及汽车与手机的通信,目前汽车与手机最广泛且稳定的通信方式是蓝牙,虽然没有4G传输的距离远,但4G信号并不能保证所有地方都能做到稳定通信。
远程遥控泊车辅助系统相比于自动泊车加入了与驾驶员通信的车载蓝牙模块,不再需要驾驶员坐在车内监控汽车的泊车过程,仅需要在车外观察即可。远程遥控泊车的技术盘点如图2-9所示。
3.自学习泊车自学习泊车能够学习驾驶员的泊入和泊出操作,并在以后自主完成这个过程。
自学习泊车辅助系统的核心技术是即时定位与地图构建( Simultaneous localizatAnd Mapping,SLAM)。
驾驶员在准备停车前,可以在车位不远处,开启“路线学习”功能,随后慢慢将汽车泊入固定车位,系统就会自学习该段行驶和泊车路线。泊车路线一旦学习成功,汽车便可达到“过目不忘”。完成路线的学习后,在录制时的相同起点下车,用手机蓝牙连接汽车,启动自学习泊车辅助系统,汽车就能够模仿先前录制的泊车路线,完成自动泊车。
驾驶员除了让汽车学习泊入车库的过程外,还能够学习汽车泊出,并行驶到办公楼的过程。“聪明”的汽车能够自动驾驶到我们面前,即使在大雨天也不用害怕冒雨取车。
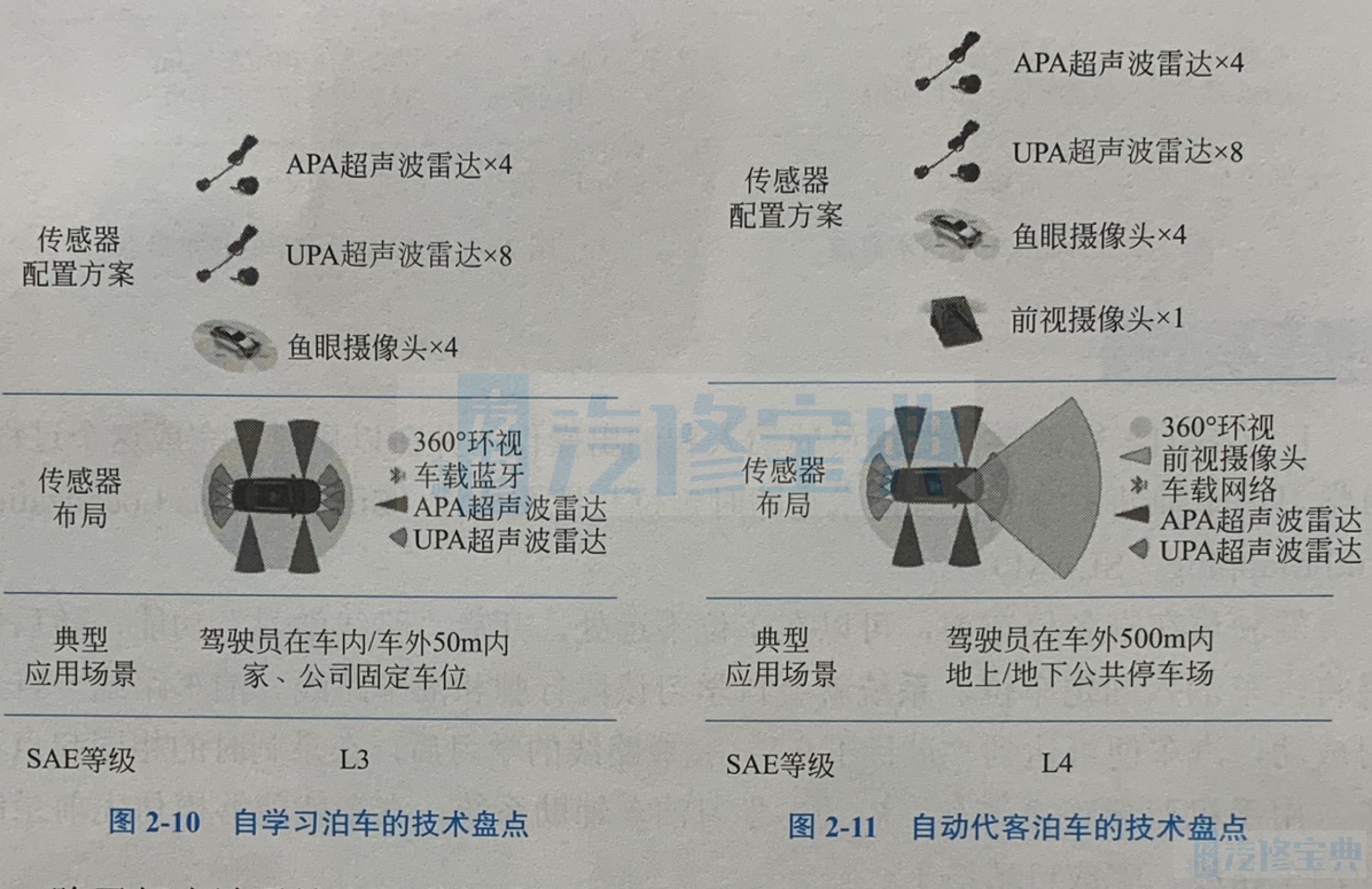
自学习泊车辅助系统相比于自动泊车和远程遥控泊车加入了360°环视相机,而且泊车的控制距离从5m内扩大到了50m内,有了明显提升。自学习泊车的技术盘点如图2-10所示。
4.自动代客泊车最理想的泊车辅助场景应该是,驾驶员把车开到办公楼下后,直接去办事,把找停车位和停车的工作交给汽车,汽车停好后,发条信息给驾驶员,告知自己停在哪。在驾驶员下班时,给汽车发条信息,汽车即可远程启动,泊出车位,并行驶到驾驶员设定的接驳点。
自动代客泊车是为了解决日常工作、生活中停车难的痛点,其主要的应用地点通常是办公楼或者大型商场的地上或地下停车场。
相比于前面三种泊车辅助产品,自动代客泊车除了要实现泊入车库的功能外,还需要解决从驾驶员下车点低速(小于20kmh)行驶至车位旁的问题。为了能尽可能地安全行驶到车位旁,必须提升汽车远距离感知的能力,前视摄像头成为最优的传感器方案。地上/地下停车场不像开放道路,场景相对单一,高速运动的汽车较少,对于保持低速运动的汽车来说,更容易避免突发状况的发生。自动代客泊车的技术盘点如图2-11所示。
除了超声波雷达和视觉传感器外,实现自动代客泊车还需要引入停车场的高精度地图,再配合SLAM或视觉匹配定位的方法,才能够让汽车知道它现在在哪,应该去哪里寻找停车位。除了自行寻找停车位外,具备自动代客泊车功能的汽车还可以配合智能停车场更好地完成自动代客泊车的功能。智能停车场需要在停车场内安装一些必要的基础设施,比如摄像头、地锁等。这些传感器不仅能够获取停车位是否被占用,还能够知道停车场的道路上是否有车等信息。将这些信息建模后发送给汽车,汽车就能够规划出一条更为合理的路径,行驶到空车位处。