汽车ACC系统通过对车辆纵向运动进行自动控制,以减轻驾驶员的劳动强度,保障行车安全,并通过方便的方式为驾驶员提供辅助支持1.汽车ACC系统的作用①汽车ACC系统可以自动控制车速,但在任何时候驾驶员都可以主动进行
加速或制动。当驾驶员在巡航控制状态下进行制动后,ACC系统控制单元就会终止巡航控制;当驾驶员在巡航控制状态下进行加速,停止加速后,ACC系统控制单元会按照原来设定的车速进行巡航控制。
②通过测距传感器的反馈信号,ACC系统控制单元可以根据靠近车辆物体的移动速度判断道路情况,并控制车辆的行驶状态;通过反馈式加速踏板感知的驾驶员施加在踏板上的力,ACC系统控制单元可以决定是否执行巡航控制,以减轻驾驶员的疲劳。
③汽车ACC系统一般在车速大于25km/h时才会起作用,而当车速降低到25km/h以下时,就需要驾驶员进行人工控制。通过系统软件的升级,ACC系统可以实现“停车/起步”功能,以应对在城市中行驶时频繁的停车和起步情况。
ACC系统的这种扩展功能,可以使汽车在非常低的车速时也能与前车保持设定的距离。当前方车辆起步后,ACC系统会提醒驾驶员,驾驶员通过踩油门踏板或按下按钮发出信号,车辆就可以起步行驶。目前奥迪和英菲尼迪等车型都已经可以通过ACC系统自适应巡航跟车至0km/h,实现全速自适应巡航。
④汽车ACC系统使车辆的编队行驶更加轻松。ACC系统控制单元可以设定自动跟踪的车辆,当本车跟随前车行驶时,ACC系统控制单元可以将车速调整为与前车相同,同时保持稳定的车距,而且这个距离可以通过转向盘上的设置按钮进行选择。
⑤带辅助转向功能的自适应巡航控制系统不仅可以使车辆自动与前车保持定间距,而且车辆还能够自动转向,使得驾驶过程更加安全舒适。
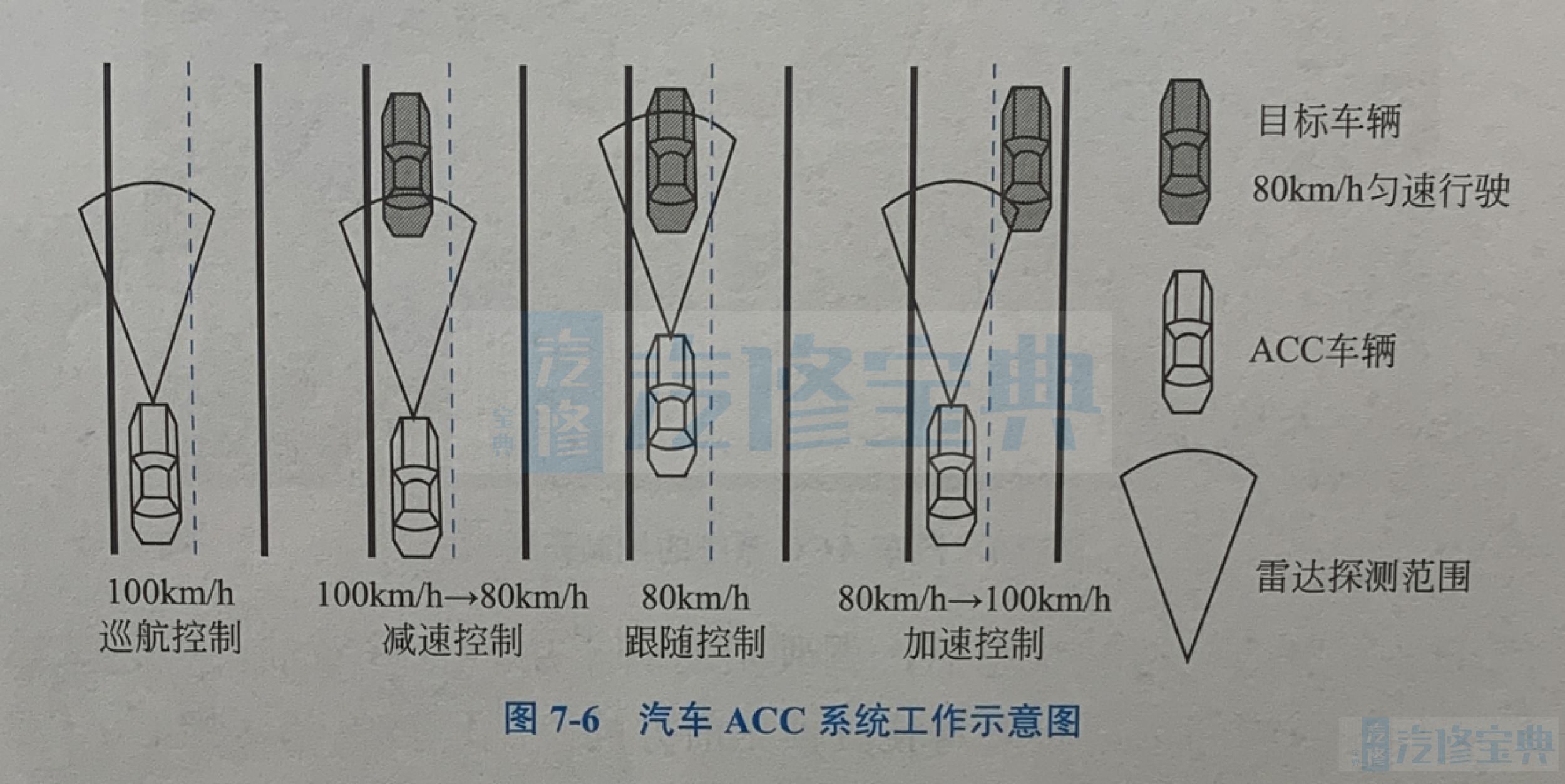
2.汽车ACC系统工作模式汽车ACC系统工作示意图如图7-6所示,共有4种典型的操作,即巡航控制、减速控制、跟随控制和加速控制。图中假设当前车辆设定车速为100kmh,目标车辆行驶速度为80km/h。
(1)巡航控制 巡航控制是汽车ACC系统最基本的功能。当前车辆前方无行
驶车辆时,当前车辆将处于普通的巡航行驶状态,ACC系统按照设定的行驶车速对车辆进行巡航控制。
(2)减速控制 当前车辆前方有目标车辆,且目标车辆的行驶速度小于当前车辆的行驶速度时,ACC系统将控制当前车辆进行减速,确保两车间的距离为所设定的安全距离。
(3)跟随控制 当ACC系统将当前车辆车速减至理想的目标值之后采用跟随控制,与目标车辆以相同的速度行驶。
4)加速控制 当前方的目标车辆加速行驶或发生移线,或当前车辆移线行驶使得前方又无行驶车辆时,ACC系统将对当前车辆进行加速控制,使当前车辆恢复到设定的车速。
在恢复行驶速度后,ACC系统又转入对当前车辆的巡航控制。当驾驶员参与车辆驾驶后,ACC系统自动退出对车辆的控制。