一、汽车自适应前照明系统定义。 汽车自适应前照明系统( Adaptive Front Lighting System,AFs)是一种照明装置,它能够根据天气情况、外部光线、道路状况以及行驶信息来自动改变前照明系统的工作模式,调整照射光线的光形,消除因为夜间或者能见度低时转弯或者其他特殊行驶条件下带来的视野暗区,能够为驾驶员提供更宽范围更为可靠的照明视野,保证驾驶员和道路行人的安全。汽车AFS是未来汽车前照明系统的主要发展方向。 图7-31所示为有无AFS照明效果比较。可以看出,AFS的转向灯能够根据转向盘的角度转动,把有效的光束投射到驾驶员需要看清的前方路面上。
二、汽车自适应前照明系统组成。
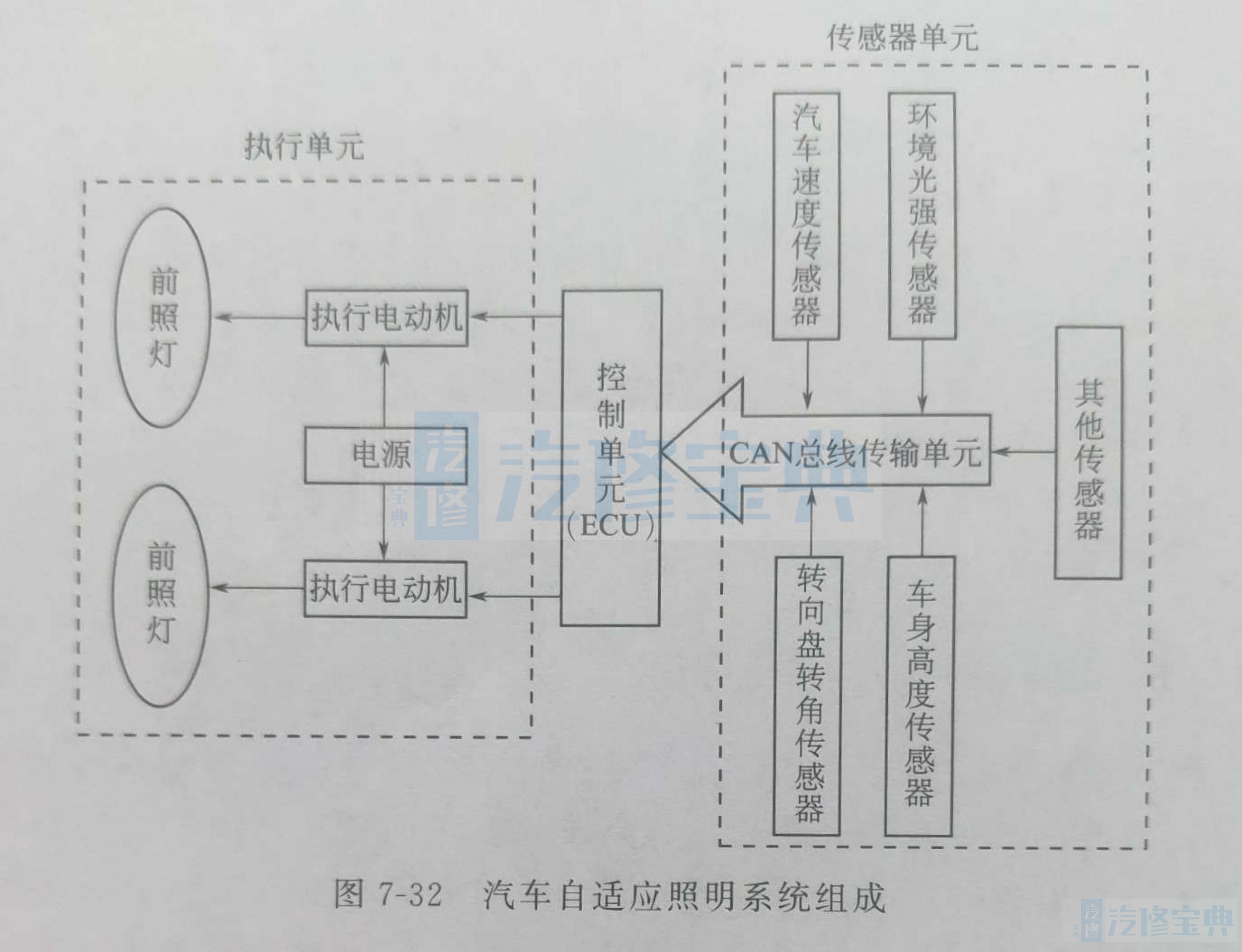
汽车自适应前照明系统主要由传感器单元、CAN总线传输单元、控制单元(ECU)和执行单元等组成,如图7-32所示。
(1)传感器单元传感器单元是采集车辆当前信息(如车速、车辆姿态、转向角度等)和外部环境(如弯道、坡度和天气等)的变化信息,包括汽车车速传感器、转向盘转角传感器、环境光强传感器、车身高度传感器、位置传感器等。
(2)CAN总线传输单元CAN总线传输单元负责把各种传感器采集的信息传输给控制单元,实现内部控制与各种传感器检测以及执行机构之间的数据通信。
(3)控制单元(ECU)控制单元需要对车辆行驶状态做出综合判断,输出脉冲变量给执行单元(4)执行单元控制单元输出的信号给执行单元的执行电动机,调节前照灯照射距离和角度,为驾驶员提供更广阔的视野,保障行车安全。
三、汽车自适应前照明系统原理。
汽车自适应前照明系统实现的基本原理是,通过安装在车辆上的车速、姿态、转角、位置等传感器采集汽车动态信号参数,经过控制单元的分析判断和算法运算并产生控制信号,执行单元控制前照明系统运转。
系统主要功能按以下方法实现。
①系统通过开关器件获取功能开关信号,通过轮速传感器获取车速信号,通过转向盘转角传感器获取转角信号,通过车身高度传感器获取姿态信号等。经过巡检算法判断,如果前照灯需要进行转动,系统会根据角度算法计算出需要转动的角度,通过控制单元输出控制信号控制水平和垂直安装的步进电机转动,最后再通过机械传动机构实现前照灯转动,让照明光束始终与道路保持一致,这样驾驶员能够清楚地看到即将岀现的弯道上的路况以便及时采取预防或者紧急避险措施。
②系统通过获取大灯开关器件信号和环境光强传感器的光照强度信号,对前照灯开关进行控制,系统会设置一个光照阈值。当光照强度小于阈值时,系统自动延时打开前照灯;当光照强度大于阈值时,系统自动延时关闭前照灯。
③系统在前照灯初始化置位时,通过获取霍尔位置传感器的位置信号,判断前照灯实际运行的角度与控制单元输出角度之间的误差。如果误差不大,通过角度PD调节算法对误差进行调节;如果误差过大,说明前照灯出现了故障,系统会产生故障报警信号提醒驾驶员前照灯出现故障。
④系统通过液晶显示装置实时显示系统的工作状态,包括车速状态、转向盘转角状态、车灯转角状态等。
四、汽车自适应前照明系统功能。
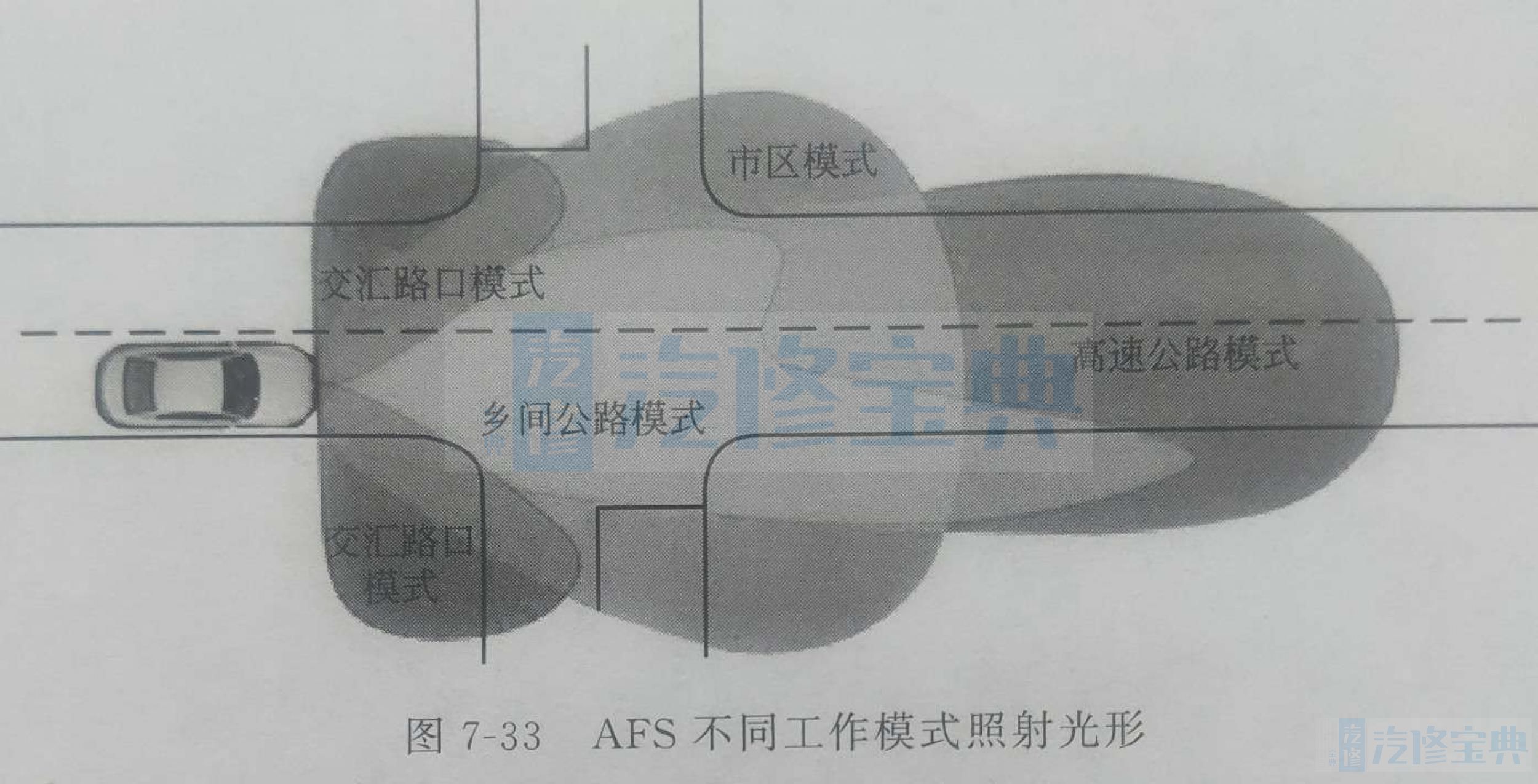
为了使汽车在不同的光线和路况下安全行驶,汽车AFS能够改变前照灯照射方向,使光线随着汽车前进方向和车身姿态的变化而转动,消除驾驶员在夜间或恶劣天气下行车的视野盲区。与传统的汽车照明模式比较,AFS能够根据道路和天气环境的变化适时的开启相应的照明模式,图7-33所示为不同工作模式下的照射光形。
汽车AFS照明模式主要有基础照明模式、弯道照明模式、城市道路照明模式、高速公路照明模式、乡村道路照明模式和恶劣天气照明模式等。
1、基础照明模式。
车辆在行驶过程中,当道路状况及环境气候均处于正常状况时,前照明系统的工作模式相当于传统的汽车照明系统,其照明模式为基础照明模式。在基础照明模式下,前照明系统不作任何调整。
当环境光强传感器检测到外界光线变化时,系统就会执行相应的动作。例如天黑或者汽车进入隧道后,环境光强传感器检测到外界光线下降,系统自动开启前照灯并且根据感知的光线强度来补充光照强度以满足驾驶要求;当传感器检测到外界光线强度能够达到照明要求,例如白天或者汽车出隧道后,系统就自动关闭汽车前照灯。有时候,车辆停止后,驾驶员下车后仍然需要灯光照明来观察停车情况,所以、系统可以设置灯光延时功能。
汽车经常会行驶在坡路上,有时即使是在平坦的道路上,由于汽车载重或者突然的加速或刹车,都会导致车身发生俯仰,车身的俯仰就一定会造成前照灯照射的角度发生变化,如图7-34所示。
汽车正常行驶过程中,前照灯光轴在水平位置,当车身发生后仰时,前照灯的照射光线就会抬高,光线抬高造成远处的照射光线发散,造成驾驶员视野模糊,不能清晰地辨认远处的行人和物体,一旦发生紧急情况,就没有足够的时间来保证行车安全。当车身发生前仰时,前照灯的照射光线降低,从而导致照明范围缩小,驾驶员不能及时的发现前方路况,严重影响了行车安全。在这种行车条件下,车身高度传感器能够检测到汽车前后高度的变化,结合车速传感器采集到的车速信息,系统根据汽车前后高度的变化量以及轴距计算出车身俯仰角的差值,从而调整汽车前照灯纵向角度,使前照灯光轴恢复到水平位置以提供最佳的照明条件,确保驾驶员在该情况下有足够视野来判断前方的路况,保证行车安全。
2.弯道照明模式。
汽车在夜间转弯行驶时,传统汽车前照灯的照射光线与车身前进方向平行,所以在车身的两侧就会出现暗区,驾驶员无法及时地发现弯道上的路况,容易导致交通事故的发生。在这种情况下,AFS可以开启弯道照明模式。当汽车进入弯道时,转向盘转角传感器和车速传感器共同作用采集数据。例如当转向角大于12“并且车速大于30km/h时,系统开始工作;当转向角小于9°或车速小于5km/h时,系统不工作或停止工作。在弯道模式下,控制单元根据传感器采集的数据计算出车灯需要偏转的角度,驱动步进电机转动以使大灯转动。
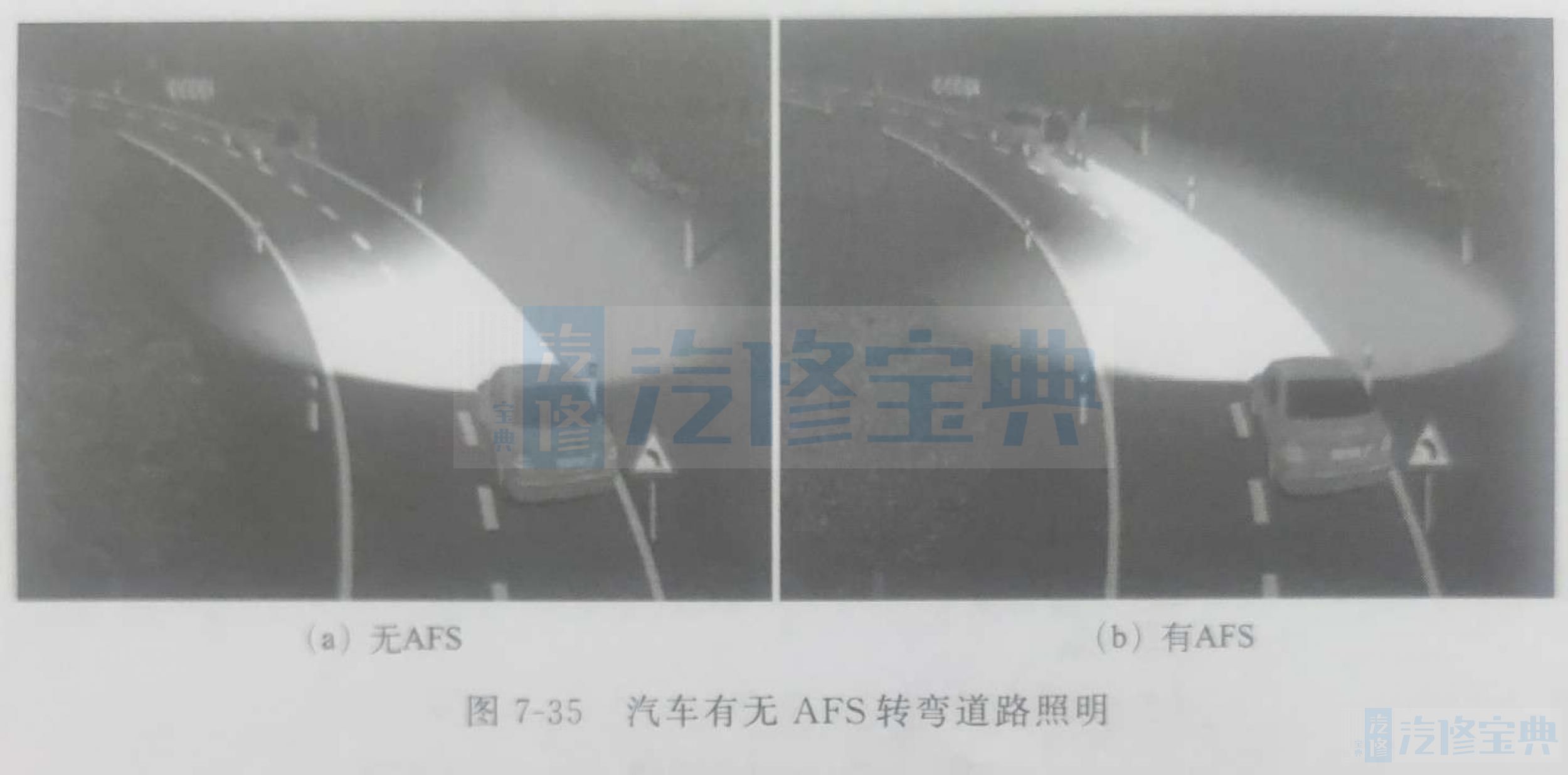
AFS能够使车辆在进入弯道时产生旋转的光型,给弯道以足够的照明,如图7-35所示。
汽车向左转弯时,左侧前照灯向左偏转一定角度,右侧车灯不动;汽车向右转弯时,右侧前照灯向右偏转,左侧车灯不动。这种照明模式既提供了汽车在弯道上行驶时侧面道路足够的照明强度,又保证了前进方向的照明。在弯道照明模式下,左右车灯最大偏转角度也是不一样的,右侧道路行驶国家的交通法规规定右侧近光灯变化角度最大为5°,左侧近光灯变化角度最大为15°。为保证弯道照明模式下的行车安全,车灯偏转角度依据的原则是尽可能地保证照明距离大于安全刹车距离。
3.城市道路照明模式。
城市道路行车的特点是车速较低,车流量和人流量都很大,外界照明条件好,十字路口多,发生随机性事故的可能性较大。在这样的道路上行车要求视野清晰,防止炫光。
资料表明,对向行车时,驾驶员接收到的照射光强如果达到1000cd就会产生眩晕。当环境光强传感器检测到光强达到阈值、车速小于60km/h时,车辆进入城市照明模式,系统使左右近光灯的功率减小,降低灯光亮度,同时驱动控制车灯的电机转动,使前照灯略向下偏转,进一步降低射向车和行人的光照强度,防止炫光现象的发生。
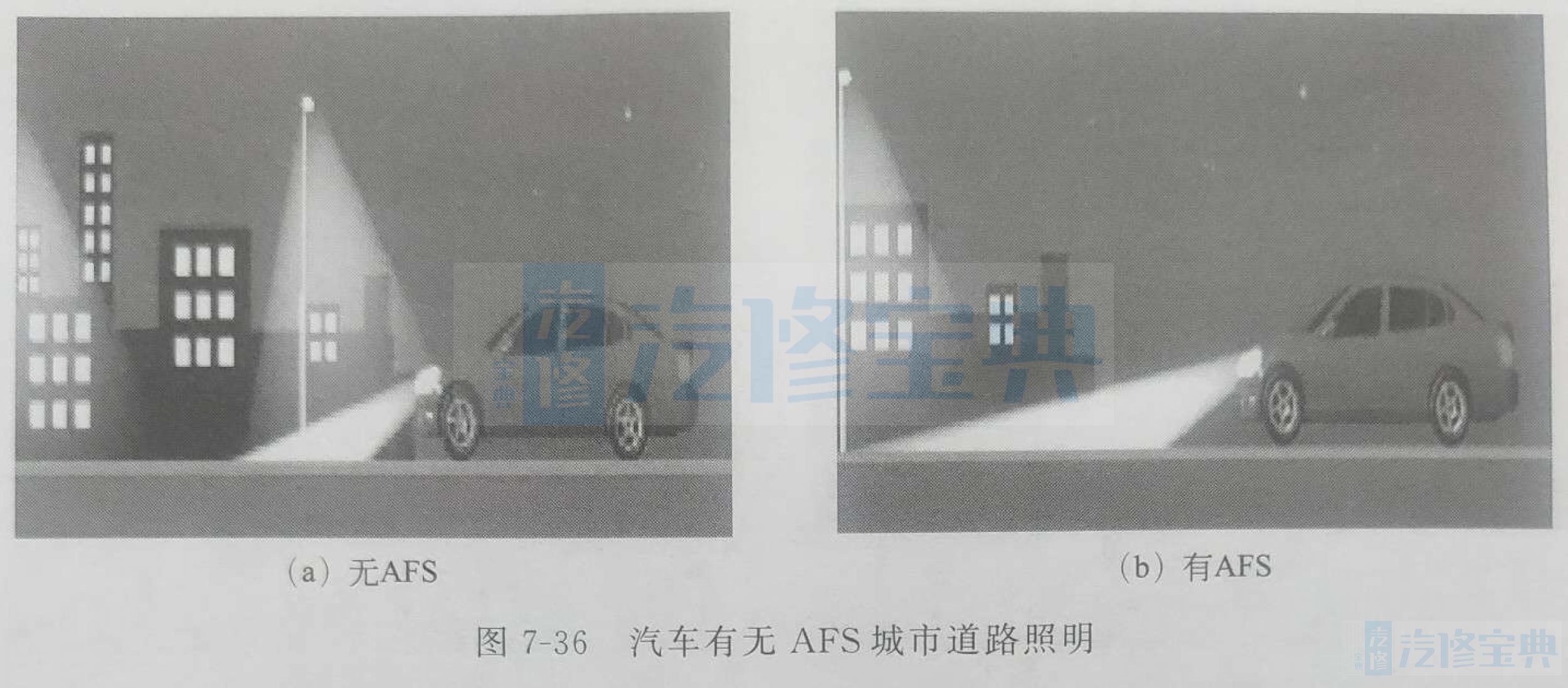
在市区车辆行驶速度较为缓慢的前提下,AFS使用比较宽阔的光型,以便在道路边缘和交叉路口都能获得较好的照明,有效地避免了与岔路中突然出现的行人、车辆可能发生的交通事故,如图7-36所示。
4.高速公路照明模式。
高速公路上行车特点是车速快,车流量相对较小,侧向干扰少。这样的行车特点要求前照灯光线照射距离足够远,以保证前方出现状况时驾驶员有足够的时间采取措施。在高速公路上行车,汽车灯光的照射距离应该与车速成正比的关系,汽车灯光的照射距离要大于驾驶员的反应距离和刹车距离的总和。
汽车行驶在高速公路时,当车速传感器检测到车速大于70km/h,并根据GPS判断其为高速行驶模式时,系统自动开启高速公路照明模式。汽车前照灯照射光线随着车速的增加在垂直方向上抬高,以使光线能够照射更远,保证驾驶员能够在安全距离之外发现前方的车辆,如图7-37所示。
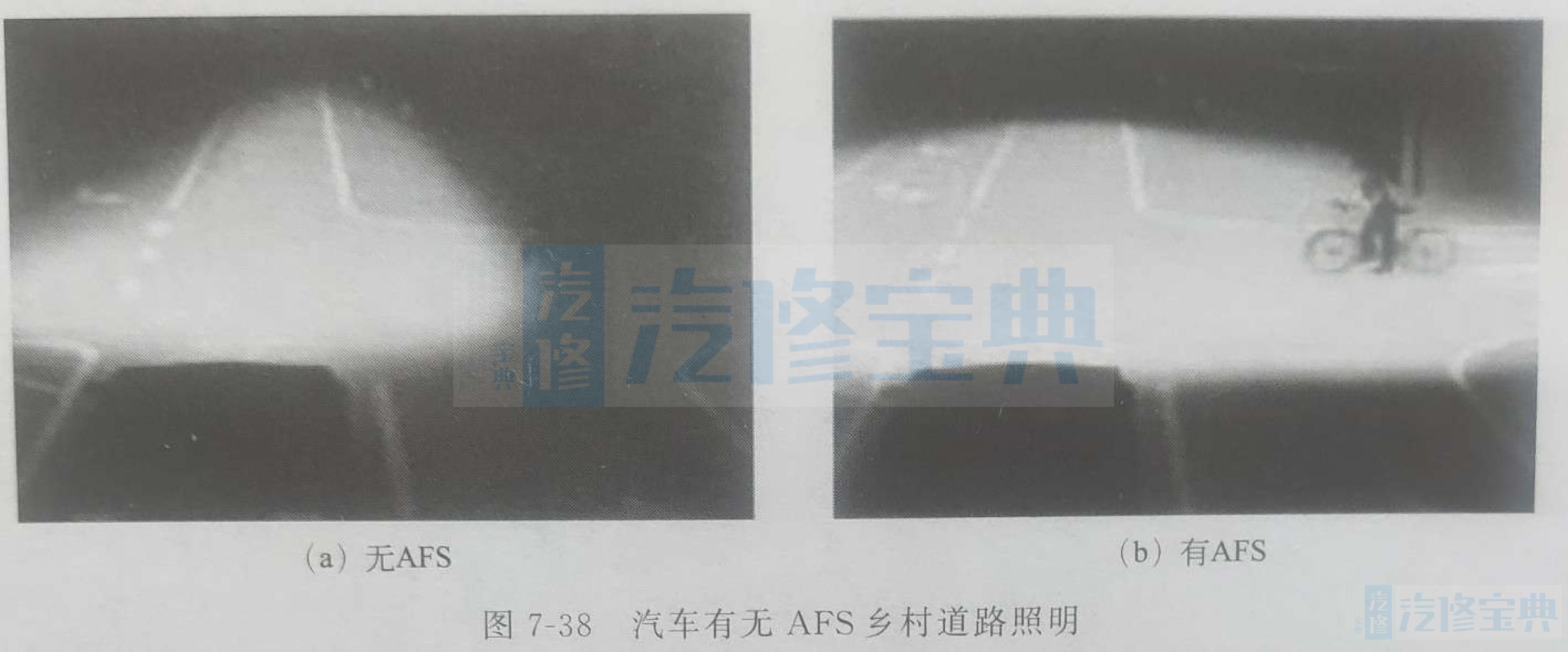
5.乡村道路照明模式。
乡村道路外界照明条件差,岔路口多,路况复杂,路边障碍物不容易被发现;道路狭窄,起伏不平,造成行车时车身倾斜从而导致前照灯俯仰角发生变化,容易引发交通事故。
AFs工作在乡村道路照明模式时,通过环境光强传感器、车速传感器和GPS用来判断外界行驶条件,决定是否开启乡村道路照明模式。在乡村道路照明模式下,系统增大左右前照灯的输出功率,增强光照亮度来补充照明。依据右侧行车的交通法规,车辆在乡村道路行驶时,右侧的前照灯照射光线要向右偏转一些,拓宽右侧道路的照明范围以使灯光能够照射到路面边缘,如图7-38所示。
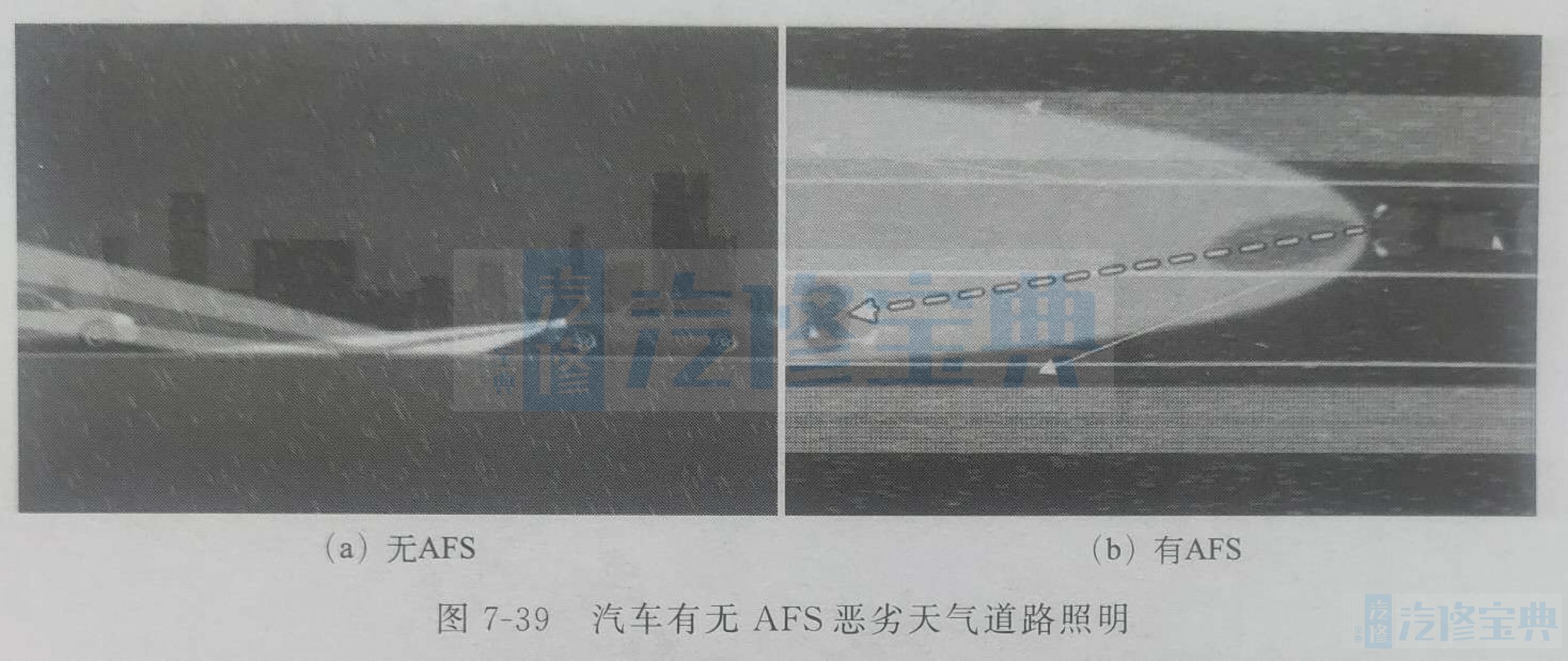
6.恶劣天气照明模式。
恶劣天气照明模式主要针对的是阴雨天气,此时地面的积水会将前照灯打在地面上的光线反射至对面会车驾驶员的眼睛中,使其炫目,进而可能造成交通事故。在阴雨天气下行驶的车辆,AFS根据检测路面湿度、轮胎滑移以及雨量传感器判断系统状态为雨天模式,AFS驱动垂直调高电动机,降低前照灯垂直输出角,并调节其照射强度,避免反射炫光在60m范围内对迎面行车驾驶员造成炫目,如图7-39所示。
当车辆行驶在雾天或者是沙尘暴天气时,AFS根据感知雾、风速传感器、颗粒物传感器以及环境光强传感器感知光线强弱,判断是否遇到雾天或是沙尘暴天气,从而驱动垂直调高电机,增大前照灯垂直输出角,使得照明光线有所提升,同时,开启车灯清醒装置,尽可能地使驾驶员获得较好的视觉,可以安全的行驶在可见度较低的恶劣天气中。
在汽车AFS实际开发和使用中,根据实际情况,可以对上述功能取舍。
五、汽车自适应前照明系统应用实例。
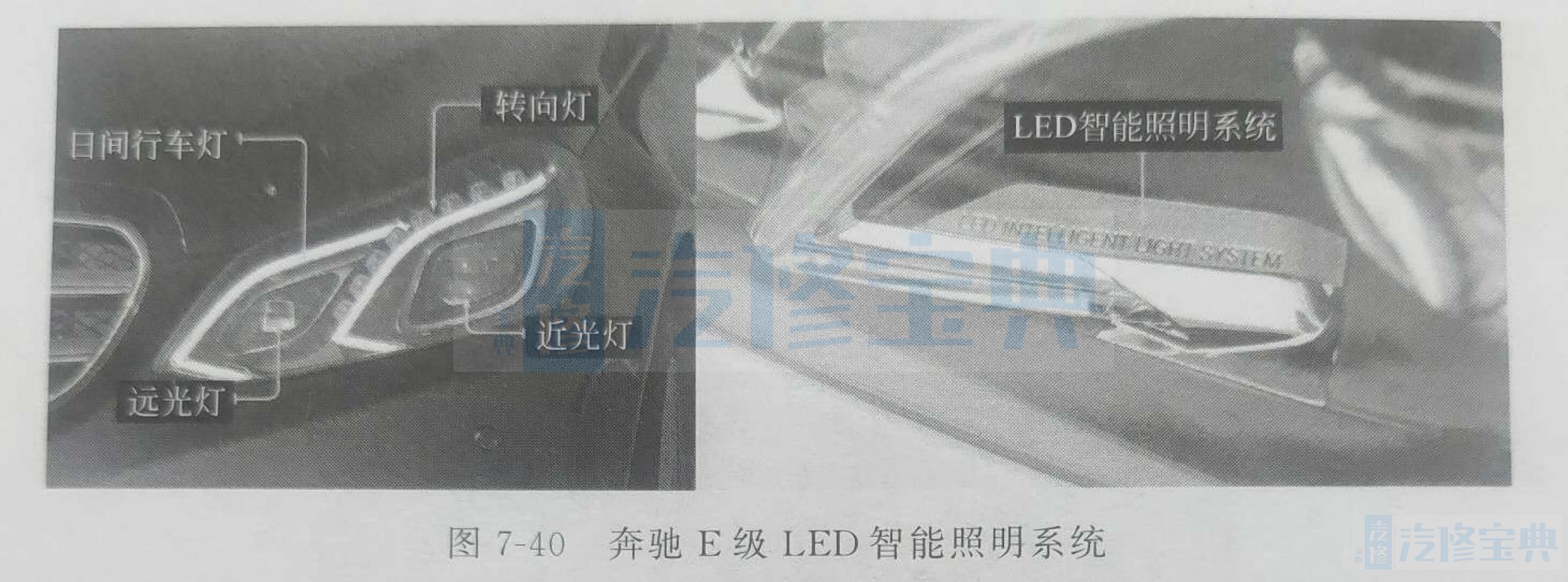
奔驰公司智能前照明系统采用LED光源,如图7-40所示。
奔驰E级LED智能照明系统具有5种发光模式,分别是乡村道路照明、高速公路照明,增强型雾灯、主动转弯照明和弯道辅助照明。
(1)乡村道路照明能够更加宽阔的照亮驾驶员一侧的路面,从而使驾驶员在黑暗中更容易判断前方路况,并能够在其他车辆或人员穿越其行车路径时,更容易做出反应。
(2)高速公路照明夜间在高速公路上行驶时,车速达到预设的速度时,LED大灯的亮度会比传统模式近光灯增加60%的照明度。并且划分出了两挡:
在车速为90km/h时,一挡自动激活,可有效改善夜间高速公路行车的远距离视野:当车速超过110km/h时,二挡启用,照明范围进一步增强,识别距离再次加大,近光灯照射距离比普通模式增加50m。
(3)增强型雾灯在浓雾、霾等天气下行驶,该功能在70km/h速度以内且后雾灯打开时被激活,驾驶员一侧的LED大灯可向外转动约8°并降低大灯照射高度,以便更好地照亮近侧路面,同时还可减轻在雾天的反射灯炫光。当车速超过100km/h时,该模式便会自动关闭。
(4)主动转弯照明根据不同的车速和转向角,主动转弯照明会自动开启。
此时主动大灯可迅速向转弯方向转动(最大可达15°),增强转角方向的照明效果约90%。
(5)弯道辅助照明当车速低于40km/h行驶时,转动转向盘或是使用转弯信号灯时,弯道照明功能会被自动激活。此时会照亮汽车前方侧面约65°、30m远的照射区域。对比传统车灯技术,能够更早地发现横穿道路的行人。
除以上5种照明模式外,奔驰还为新E级推出了增强型自适应远光灯的功能。该系统可实现远光灯在持久照明的同时,能有效避免对其他车辆或行人造成的炫光干扰。通过车前立体多功能摄像头探测,LED灯组会在ECU的控制下自动把光线压低至前方同向或对向车辆之下,使其他车辆不受远光灯影响。根据交通流量及道路照明条件的不同,远光照射距离可以从65m一直延伸至300m。
目前,汽车自适应前照明系统主要用在豪华轿车上,如奔驰、奥迪、宝马、雷克萨斯等车型上。