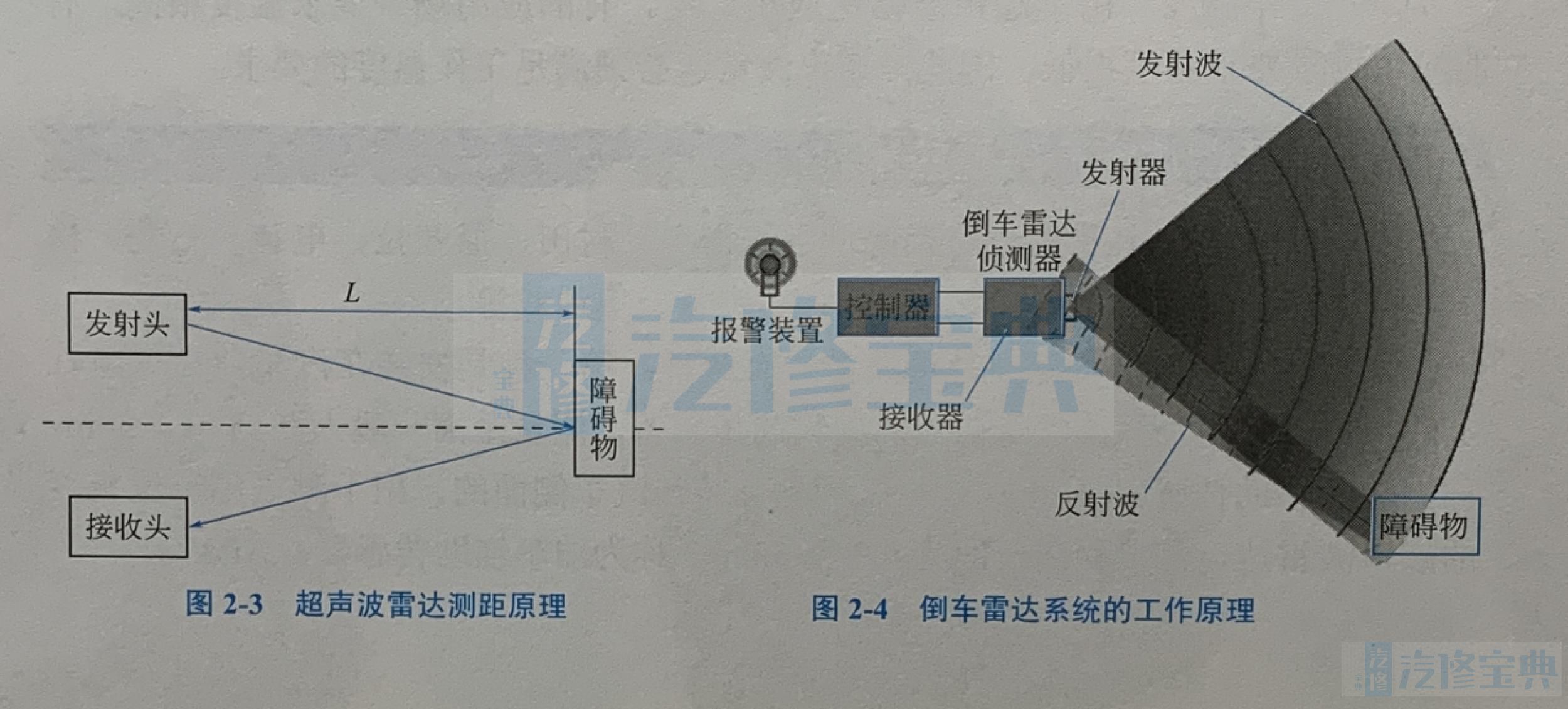
超声波雷达测距原理是超声波发射头发出的超声波脉冲,经介质(空气)传到障碍物表面,反射后通过介质(空气)传到接收头,测出超声脉冲从发射到接收所需的时间,根据介质中的声速,求得从探头到障碍物表面之间的距离。如图2-3所示,设探头到障碍物表面的距离为L,超声在空气中的传播速度为v(约为340m/s),从发射到接收所需的传播时间为t,当发射头和接收头之间的距离远小于探头到障碍物之间的距离时,则有L=νt/2。由此可见,被测距离与传播时间之间具有确定的函数关系,只要能测出传播时间,即可求出被测距离。 超声波雷达在汽车上的典型应用之一就是倒车雷达,倒车雷达系统的工作原理如图2-4所示。倒车雷达系统的工作原理就是在车的后保险杠或前后保险杠设置超声波雷达器,用以侦测前后方的障碍物,帮助驾驶员“看到”前后方的障碍
物,或停车时与其他车的距离。
倒车雷达系统通过超声波雷达来侦测出离车最近的障碍物距离,并发出警报来警告驾驶员。警报的控制通常分为两个阶段:当汽车的距离达到某一开始侦测的距离时,警报开始以某一高频的声音鸣叫;而当车行至更近的某一距离时,则警报改以连续的声音,来告知驾驶员。倒车雷达系统的优点在于驾驶员可以用听觉获得有关障碍物的信息,或与其他车的距离。倒车雷达系统主要用于协助停车所以当达到或超过某一车速时系统功能将会关闭。