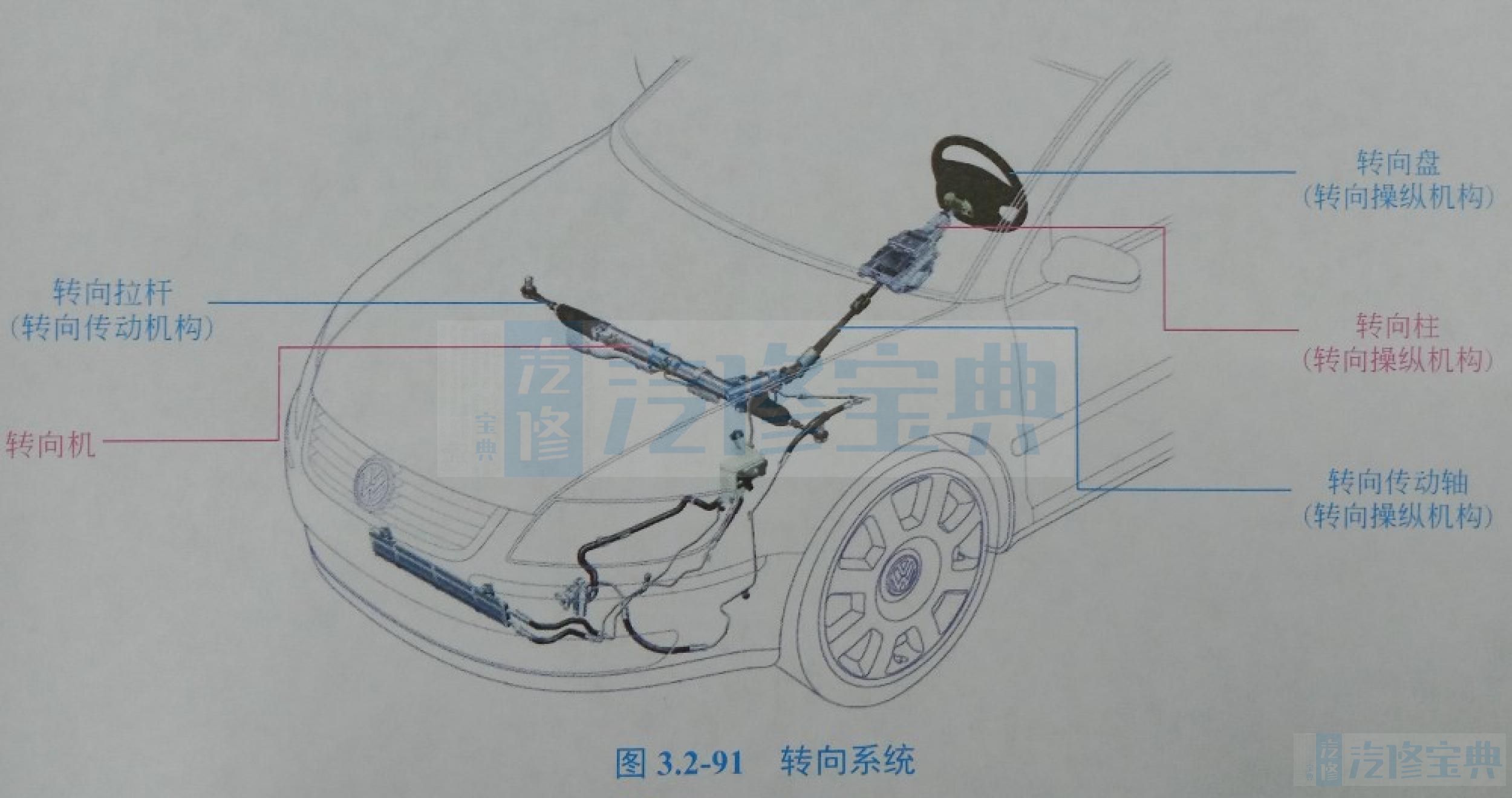
多转向系统(图3.2-91)决定车辆行驶的方向。该系统负责车辆平稳、稳定以及安全的转向,它必须稳固和完全可靠。转向系统由转向操纵机构、转向机和转向传动机构三个基本部分组成。
1.液压动力转向系统。
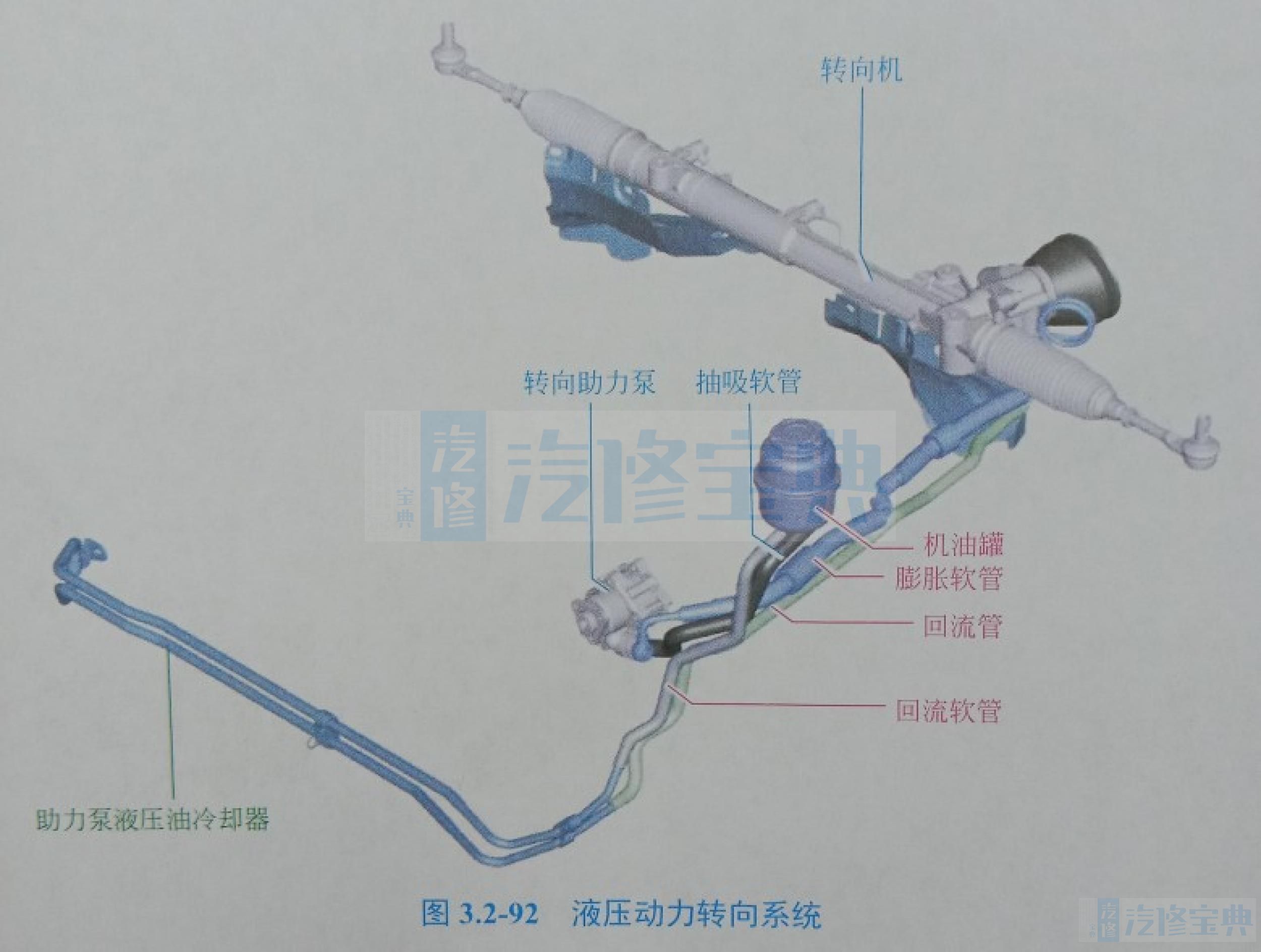
(1)结构组成。液压动力转向系统主要由转向机、转向助力泵、机油罐(转向油助力油储存罐)组成(图3.2-92)。
液压动力转向系统通过一个液压转向助力泵产生转向助力,该助力泵由发动机的皮带传动机构进行驱动。通过转向力使转向柱下端的扭力杆扭转。通过扭转控制阀门,从而使液压油作用于齿轮齿条式转向器内的工作活塞上。由此在齿轮上产生的作用力与驾驶员施加的转向力叠加,合力通过转向横拉杆促使车轮转向。
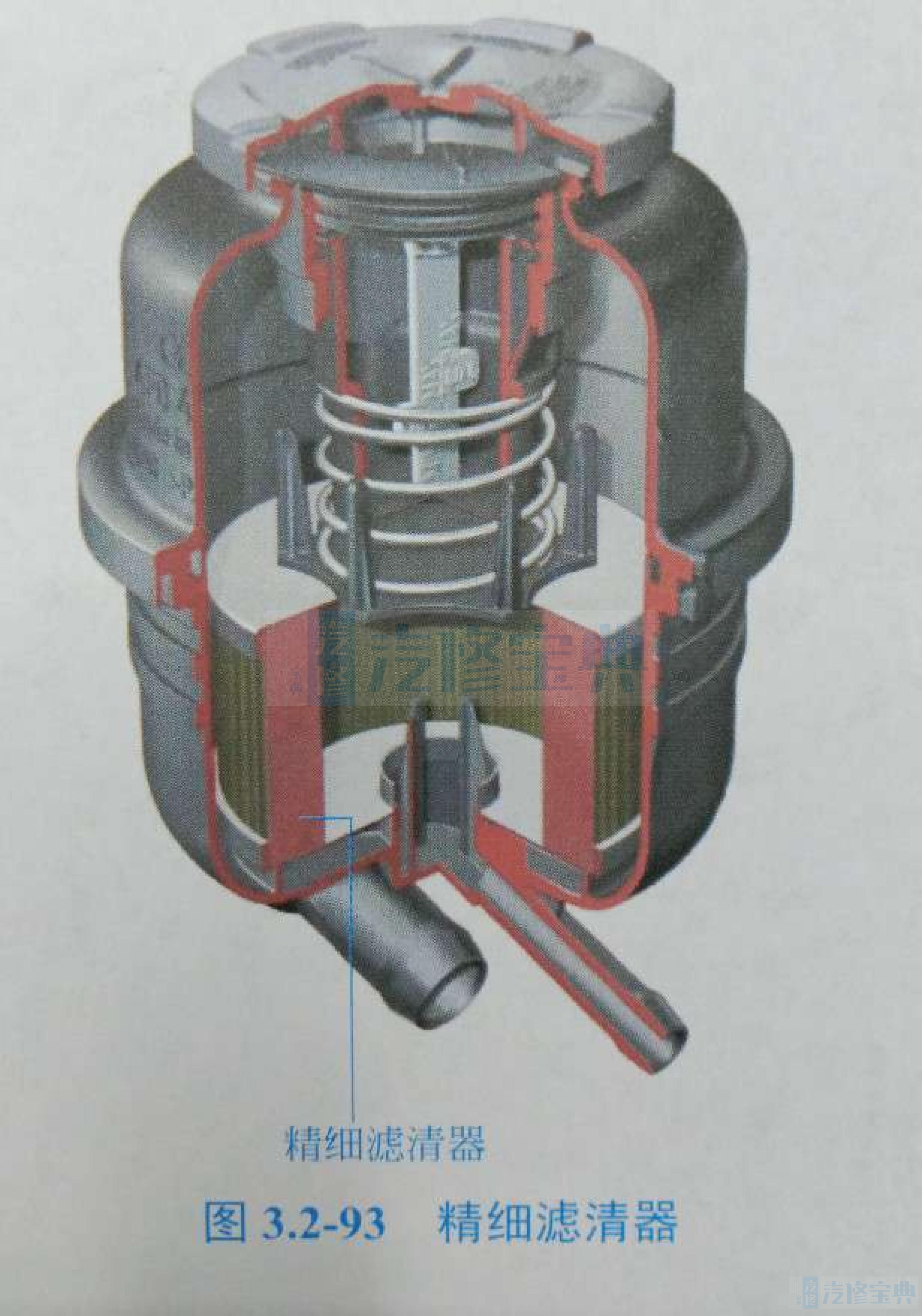
①心机油罐。机油罐內装有精细滤清器(图32-93),它可以有效地滤掉液压系统内的污物和磨屑,因此可大大减轻部件的磨损,尤其是泵、转向阀和活塞油封的磨损。
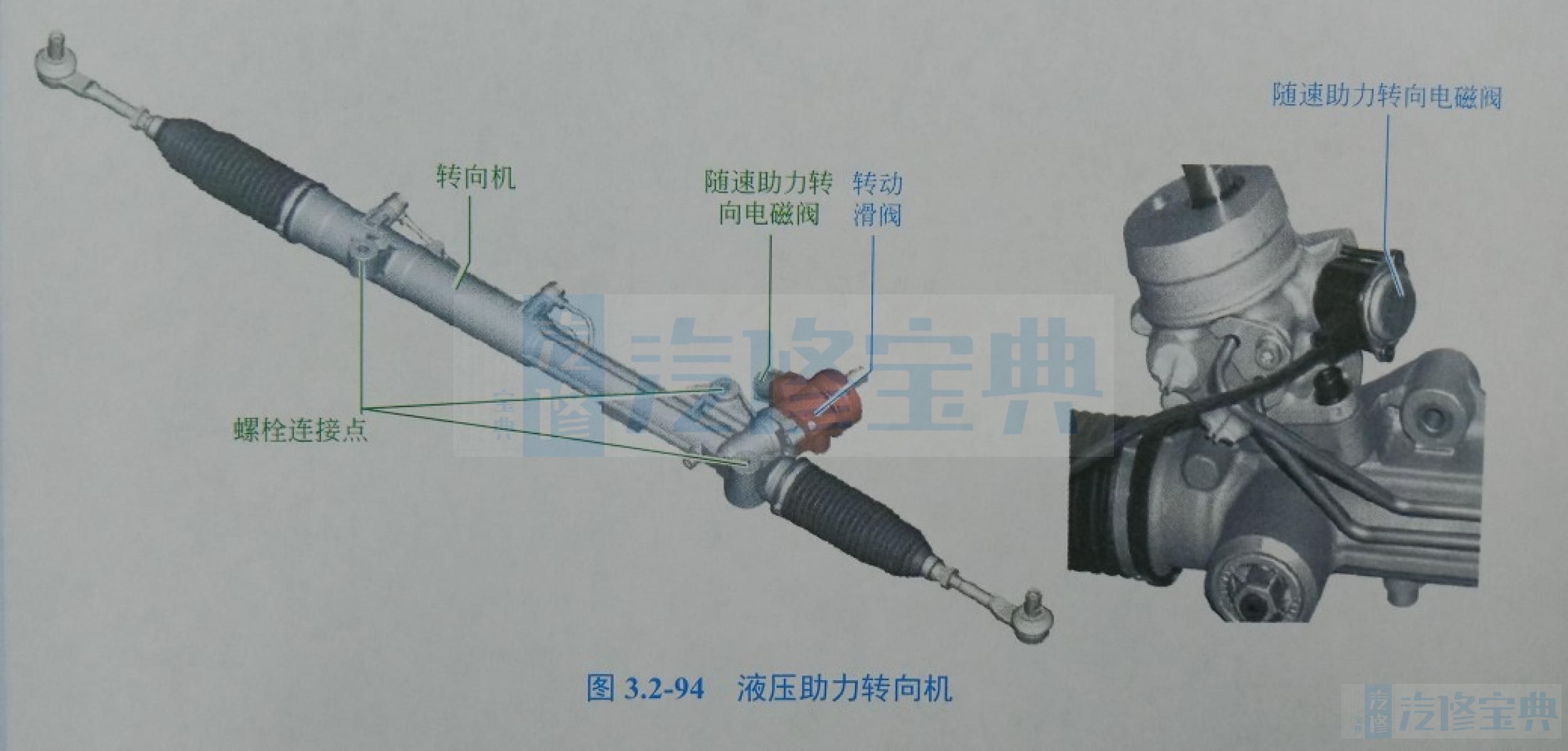
②转动滑阀(也称旋转阀)。转动滑阀是单独一个部件,它是通过螺栓安装在铝制转向机壳体上的。
③随速助力转向电磁阀。随速助力转向电磁阀是由供电控制单元来控制的,该控制单元的输入信号是来自ESP控制单元的速度信号。
液压助力转向机如图3.2-94所示。
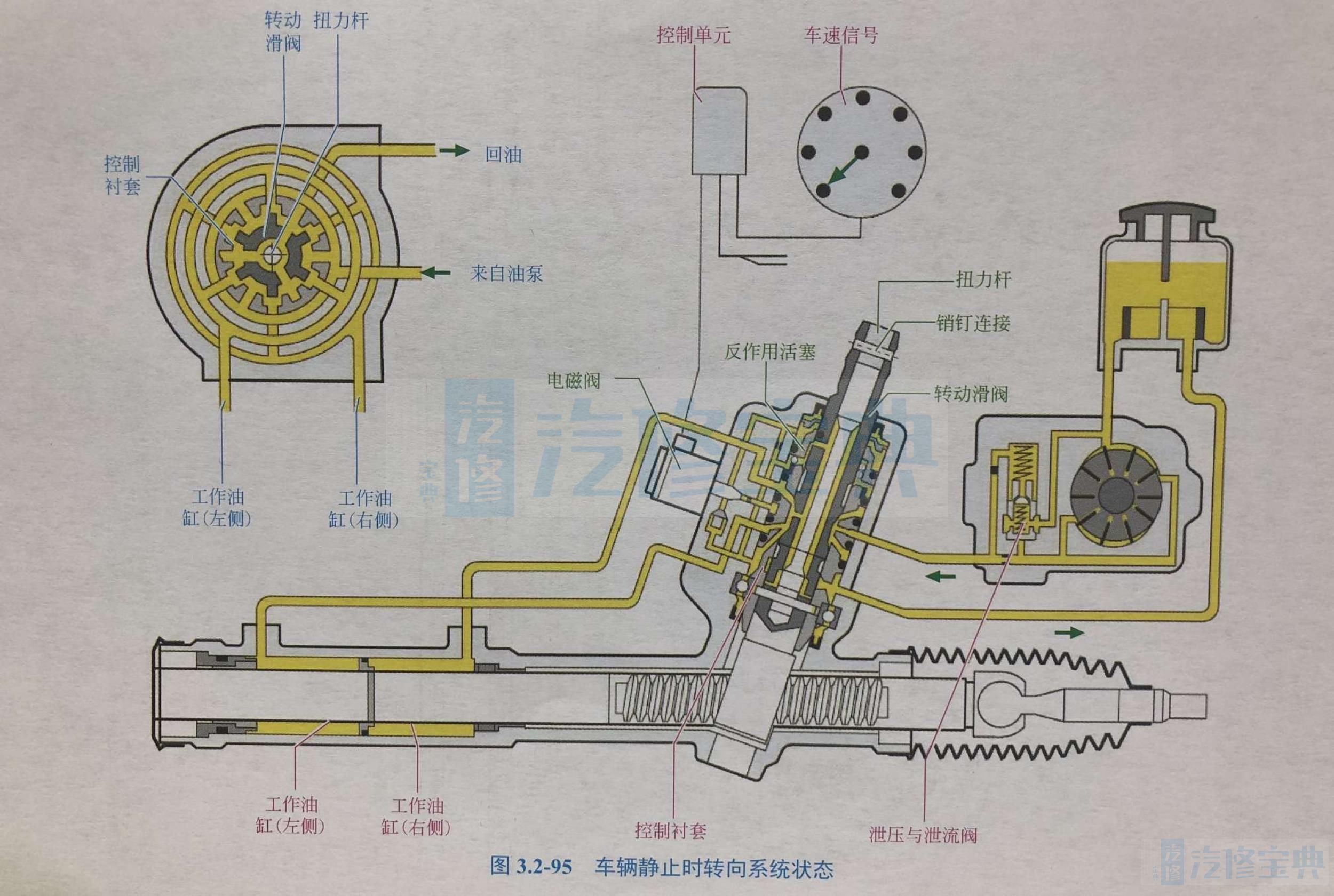
(2)静止状态转向系统工作情况。车辆静止状态,转动滑阀(旋转间)处于中间位置时系统所需的压力由常规的液压泵产生,此压力传送给旋转阀。在该阀中有一根扭力杆,其一端用销钉固定在旋转阀上,另一端也用销钉固定在驱动小齿轮与控制衬套上(图3.2-95)。该扭力杆起对中(中性位置)的作用。
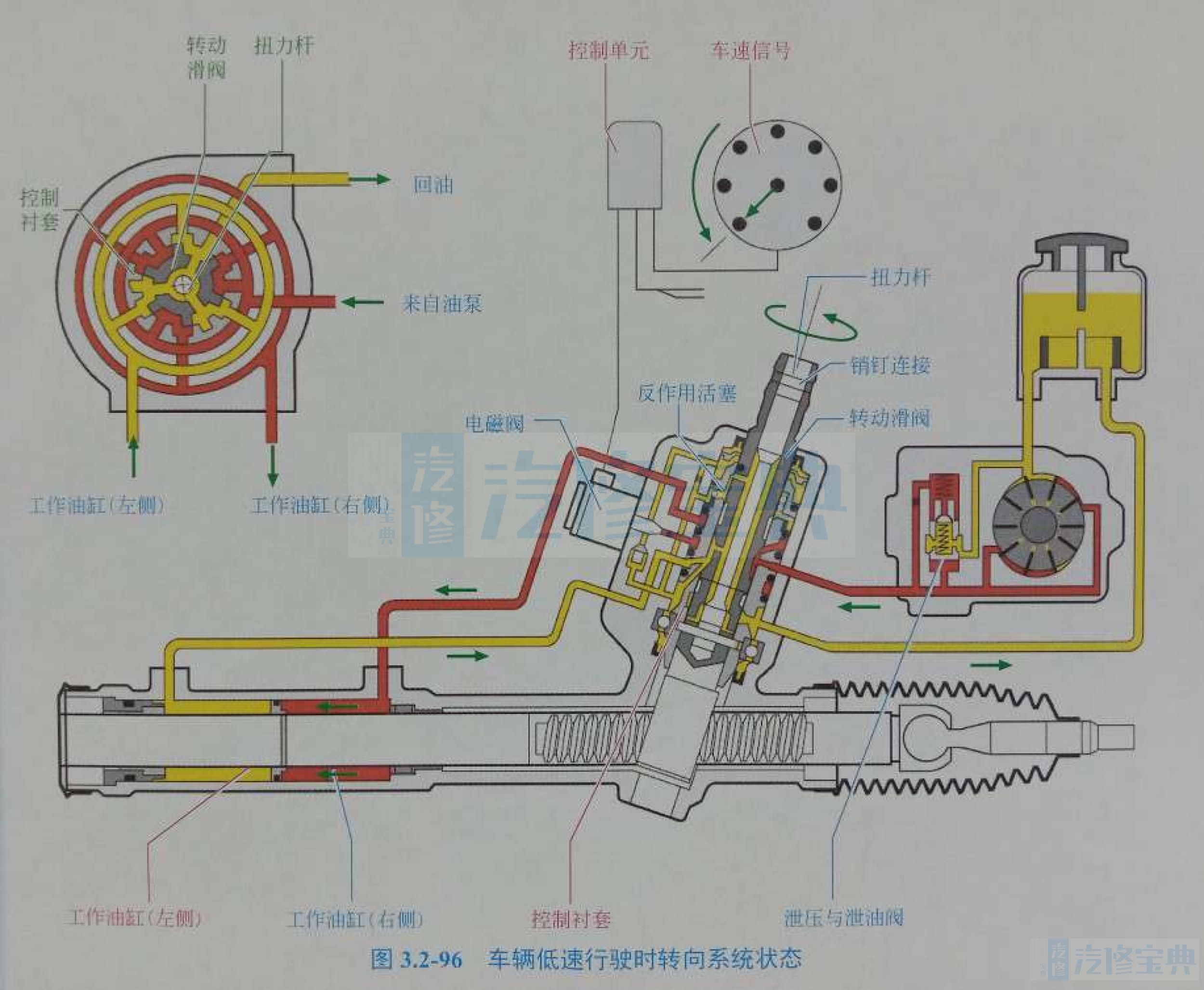
(3)低速行驶转向系统工作情况旋转阀的工作位置处于左转向极限位置时,车辆为低速行驶状态。
如图3.2-96所示,在这种情况下,控制单元增大了供给电磁阀的电流,于是该阀的孔口截面就增大了,比实际车速所要求的还大。通过打开的电磁阀就会多流出一些机油(流入机油罐),机油在流动中可将热量释放到环境中,这样就可以降低机油的温度了。根据转向角传感器通过CAN总线传来的信息,控制单元决定电磁阀的控制时间长短和控制电流的大小,这个调节过程只有在车速不超过10km/h时才能工作。
2.电动机械式助力转向系统。
(1)总体结构。电动机械式助力转向系统(EPS)没有了液压助力系统的液压泵、液压管路、转向柱阀体等结构,结构非常简单,通过减速器以纯机械方式将电动机产生的助力传递到转向系统上。EPS是机电一体化的产品,如图3.2-97所示。
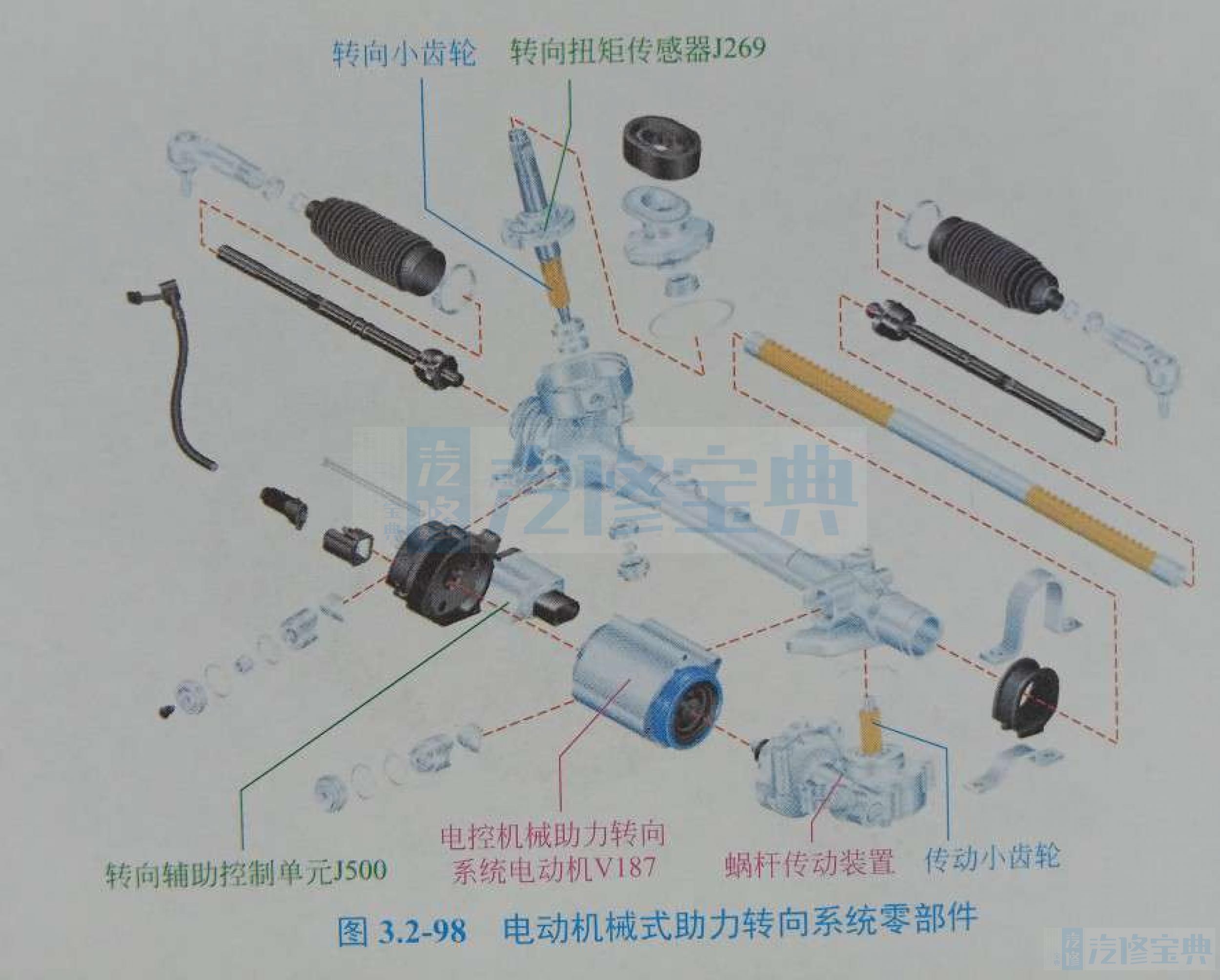
(2)电动机械式助力转向系统零部件见图3.2-98。
①转向辅助控制单元。转向辅助控制单元根据转子位置和转向力矩这些信息来确定电压的状态模型(图3.2-99)。
②电动机械式助力转向电动机。
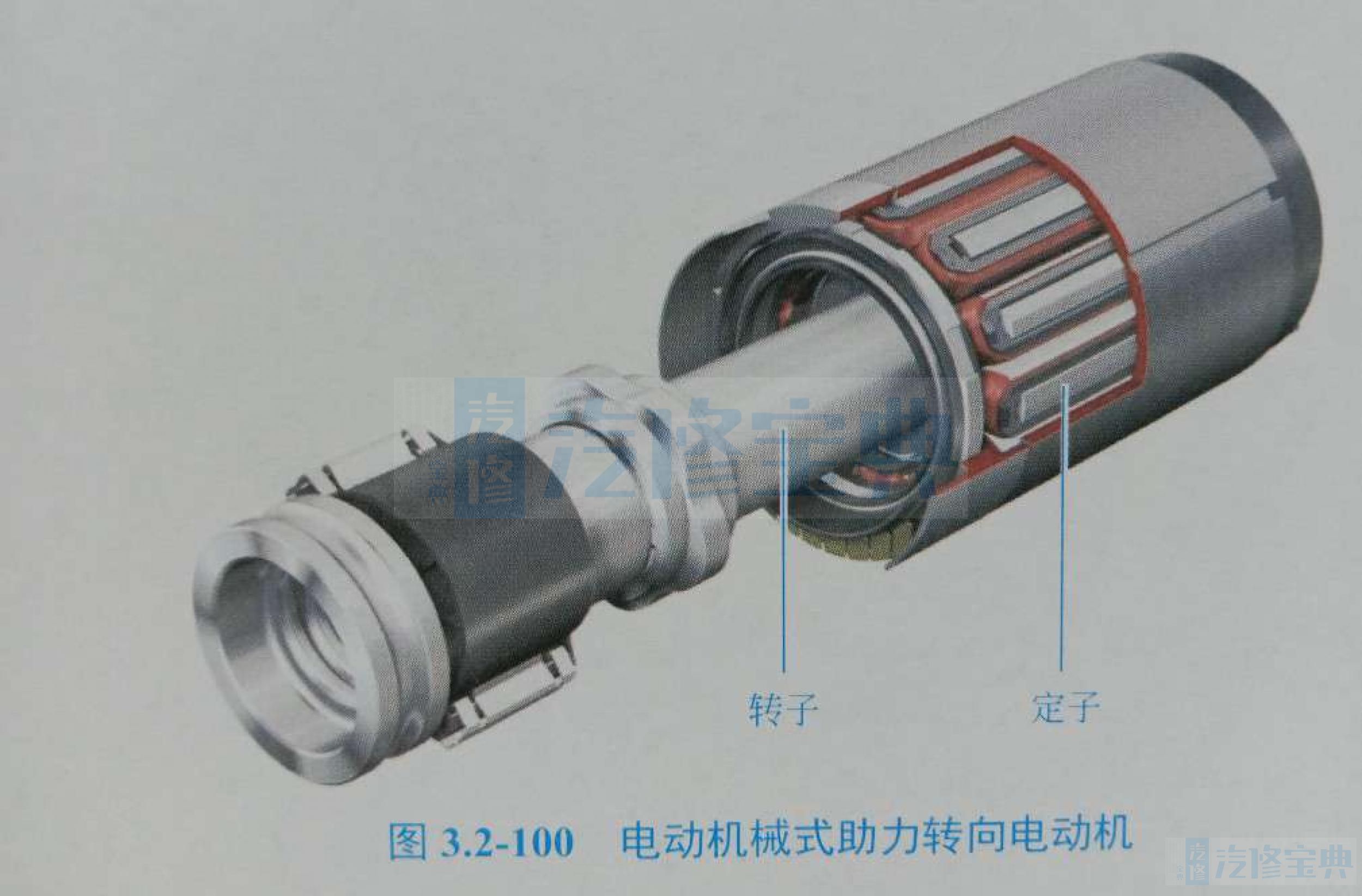
a.结构。该电动机用于产生转向助力所需要的力矩,使用的是一个永久励磁式三相交流同步电动机(图3.2-100)。
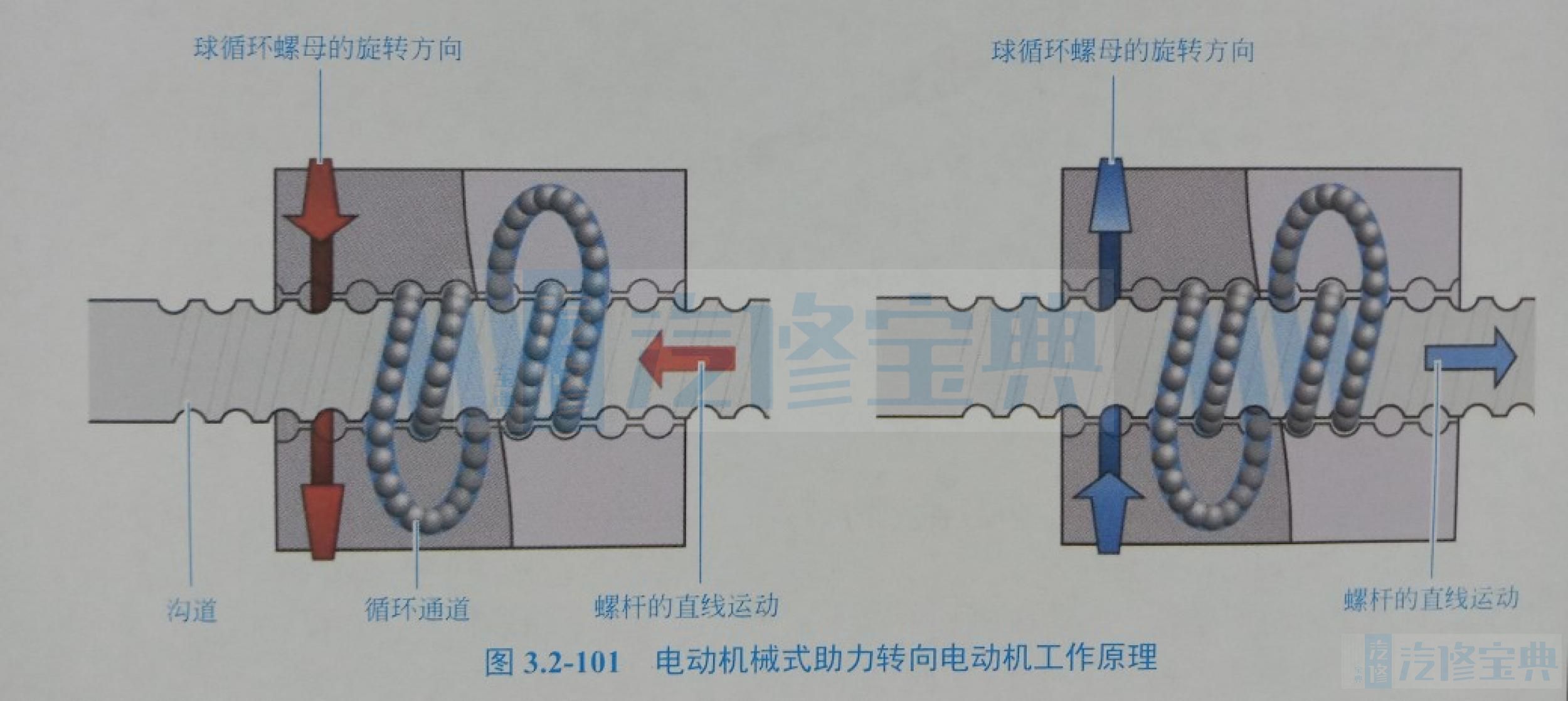
b.工作原理。将电动机的旋转运动转换成齿条的直线运动,这个工作就是由滚珠丝杠来完成的。
滚珠丝杠的工作原理类似于普通的螺栓-螺母系统,螺距变成了沟道,螺栓(螺杆)和螺母(球循环螺母)之间的连接是通过沟道中的球来实现的。这些球在滚动,就像轴承内的滚子元件那样在一个封闭着的循环回路中运动。要想实现这点,球循环螺母内有一个循环通道,它将球循环螺母的沟道的“起始点”和“终结点”连接在一起。
随着球循环螺母的反向转动以及球滚动方向的逆转,螺杆的运动方向也就跟着改变了。球循环螺母固定在纵向,它如果转动的话,那么螺杆就会按箭头方向做直线运动(图3.2-101)。
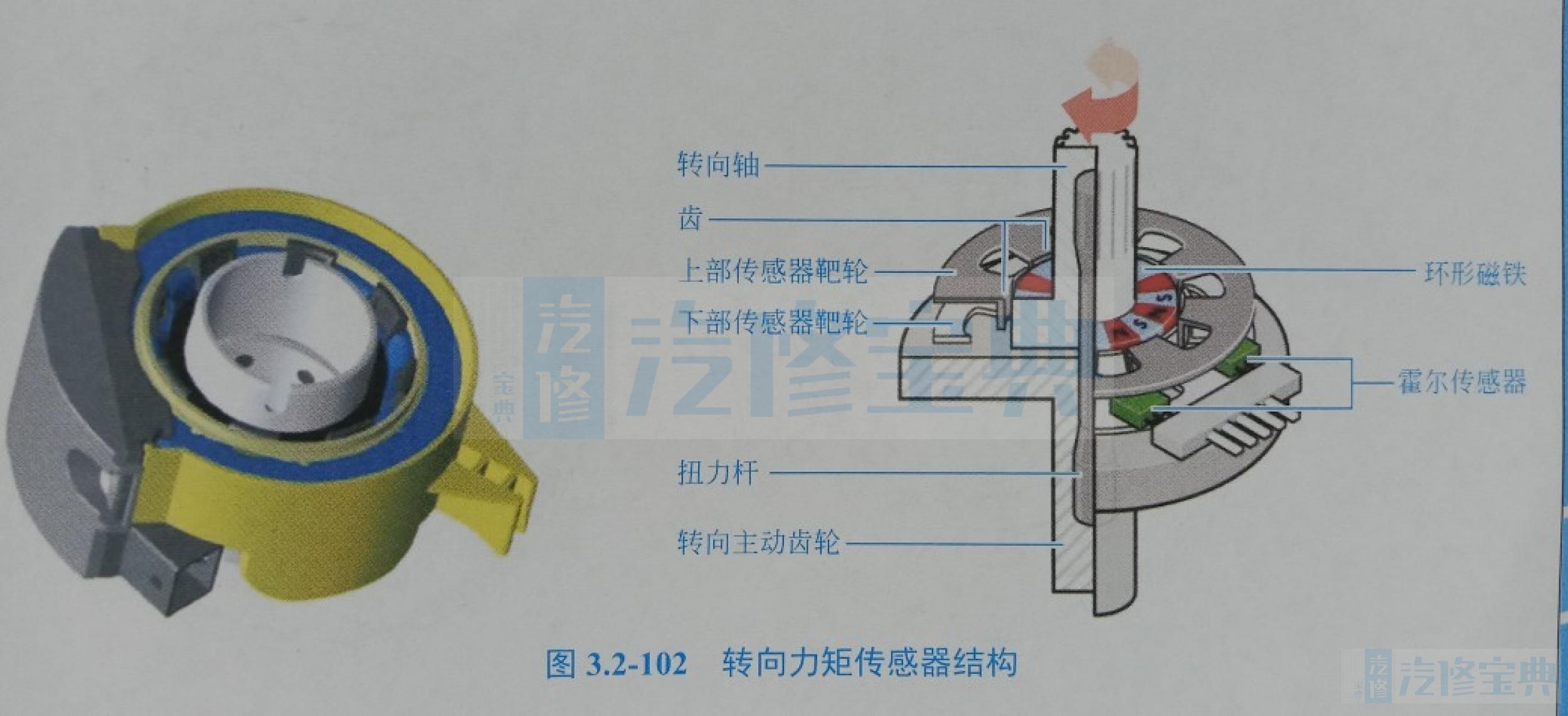
③转向力矩传感器。
a.结构。带有八对极偶的环形磁铁与转向轴是刚性连接的。两个传感器靶轮各有八个齿,与转向主动齿轮是刚性连接的。这两个传感器靶轮的齿是错开布置的,从上面沿着旋转轴方向看的话,一传感器靶轮的齿处在另一个传感器靶轮的齿隙中。在这两个传感器靶轮的中间是两个霍尔传感器,这两个传感器与壳体是刚性连接的(图3.2-102)。
b.工作原理。计算任何时刻所需要的转向助力力矩的大小,其基础信息就是驾驶员所施加的转向力矩大小。转向力矩传感器就是用来确定这个转向力矩大小的。如图3.2-103所示,转向主动齿轮与转向轴是通过一个扭力杆连接的,这与带有转向阀的普通液压转向机构是一样的。如果驾驶员转动了转向盘,那么扭力杆和转向轴相对于转向主动齿轮就发生扭转。扭转的程度取决于驾驶员所施加的转动力矩的大小。转向力矩传感器可以测量出这个扭转程度的大小。
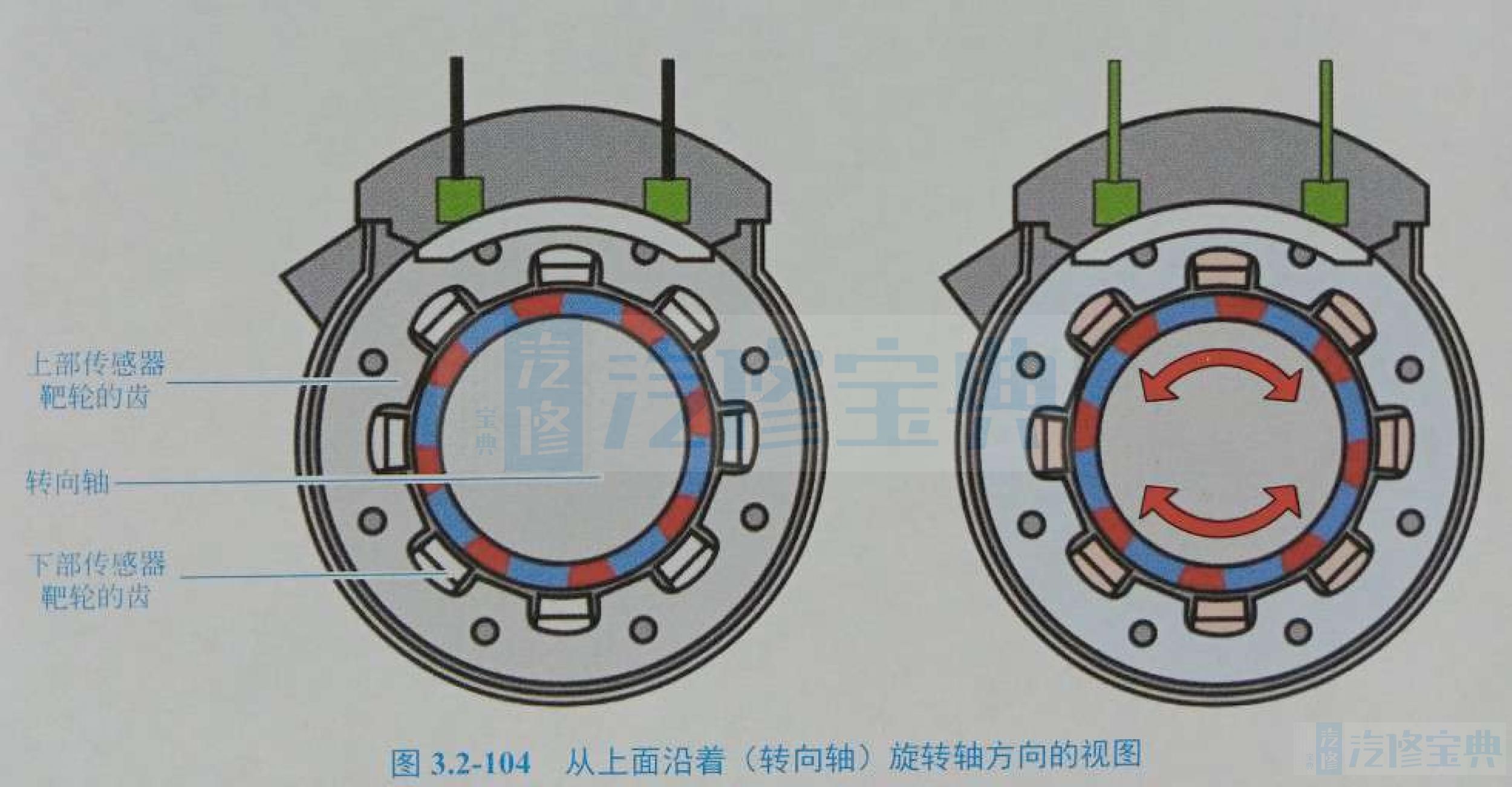
如果没有转动转向盘,那么传感器靶轮与磁极的相对位置是这样的:每个传感器靶轮上的齿都在北极和南极的正中位置。因此,这两个传感器靶轮被磁力线所穿过的方式是样的,这两个传感器靶轮之间没有磁场。两个霍尔传感器上输出的信号也相同。
转向运动使得扭力杆发生扭动,因此也导致环形磁铁与传感器靶轮之间发生相对运动。
环形磁铁的扭转使得磁极位置相对于传感器靶轮发生了改变。传感器靶轮上的齿就会离开北极和南极之间的正中位置。根据转向盘的转动方向,一个传感器靶轮的齿按比例更靠近北极一些,另一个传感器靶轮的齿按比例更靠近南极一些。这就使得磁路失调,这个磁通量就被霍尔传感器测量到(图3.2-104)。
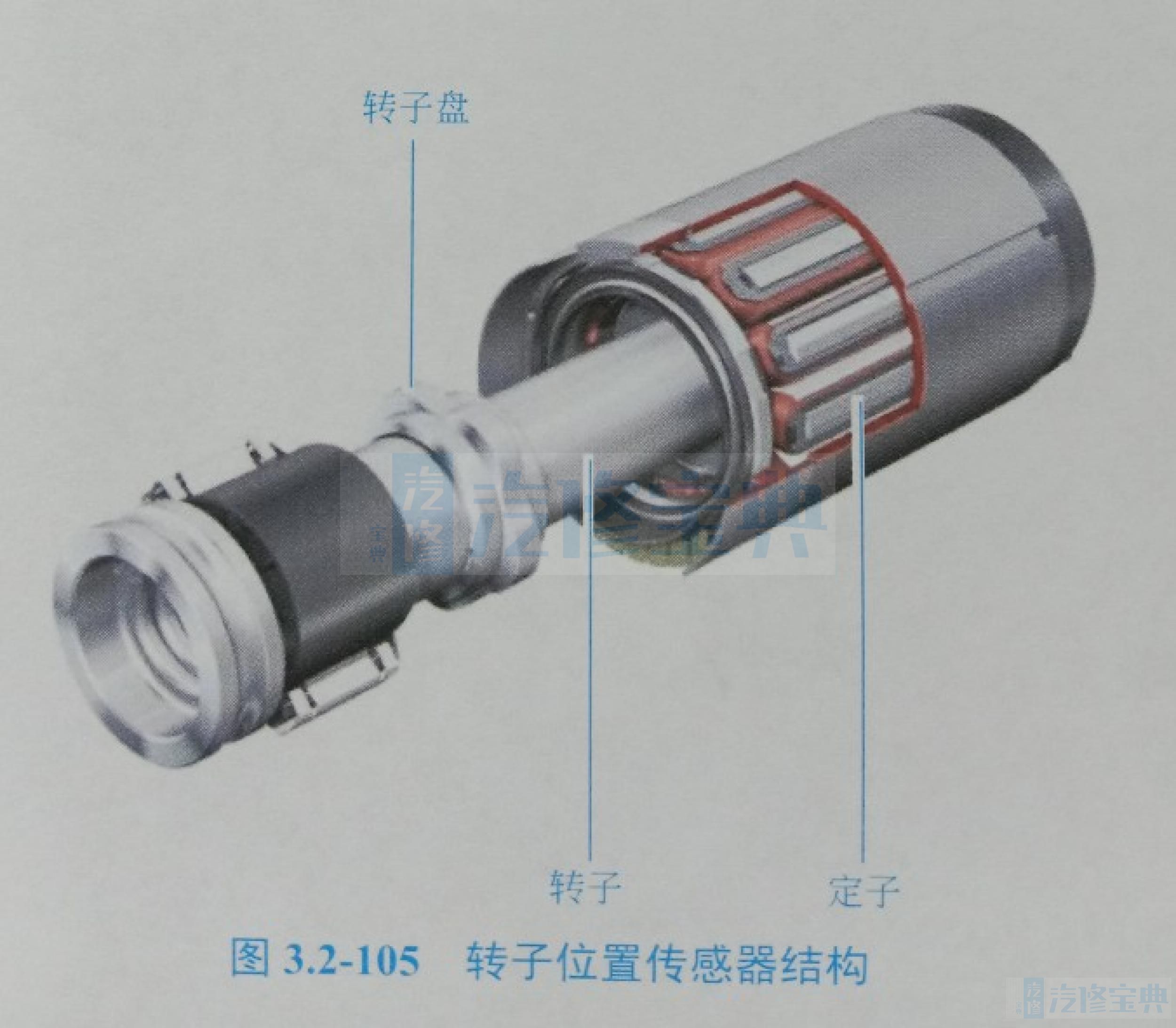
④转子位置传感器。转子位置传感器用于探知转子的位置。控制单元必须知道转子的准确位置,以便计算出环绕的定子磁场所需要的相电压(电子传感器控制的整流)。转子位置传感器测得的值也可以用于确定转向止点。为了避免硬的机械式止点,通过电动机械式转向机构可以实现“软的”止点。
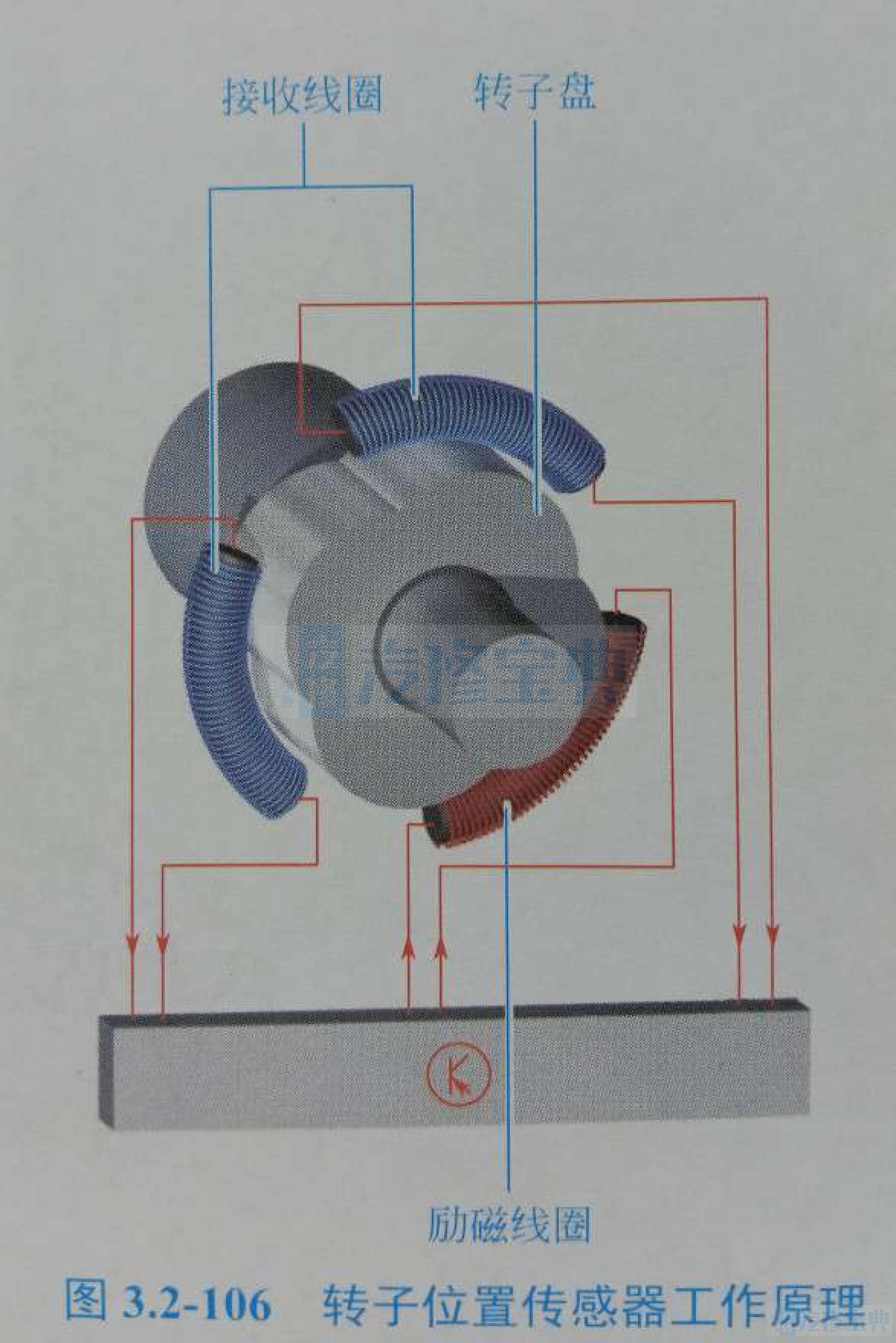
a.结构。转子上有一个盘,它是用透磁通的金属制成的。这个转子盘的形状特殊,像凸轮盘。该盘被一个固定在壳体上的电磁线圈环所包围着,该电磁线圈环起着定子作用该线圈环由三个单线圈构成,其中一个线圈起着励磁线圈作用,另两个作为接收线圈使用(图3.2-105)。
b.工作原理。励磁线圈通上正弦曲线的励磁电压,其周围产生的交变磁场作用到转子盘上,转子盘将励磁线圈产生的交变磁场的磁通引向接收线圈。于是在接收线圈内就感应出一个交变电压,该电压与转子盘的位置成一定比例,与励磁电压是有相位差的(图3.2-106)。
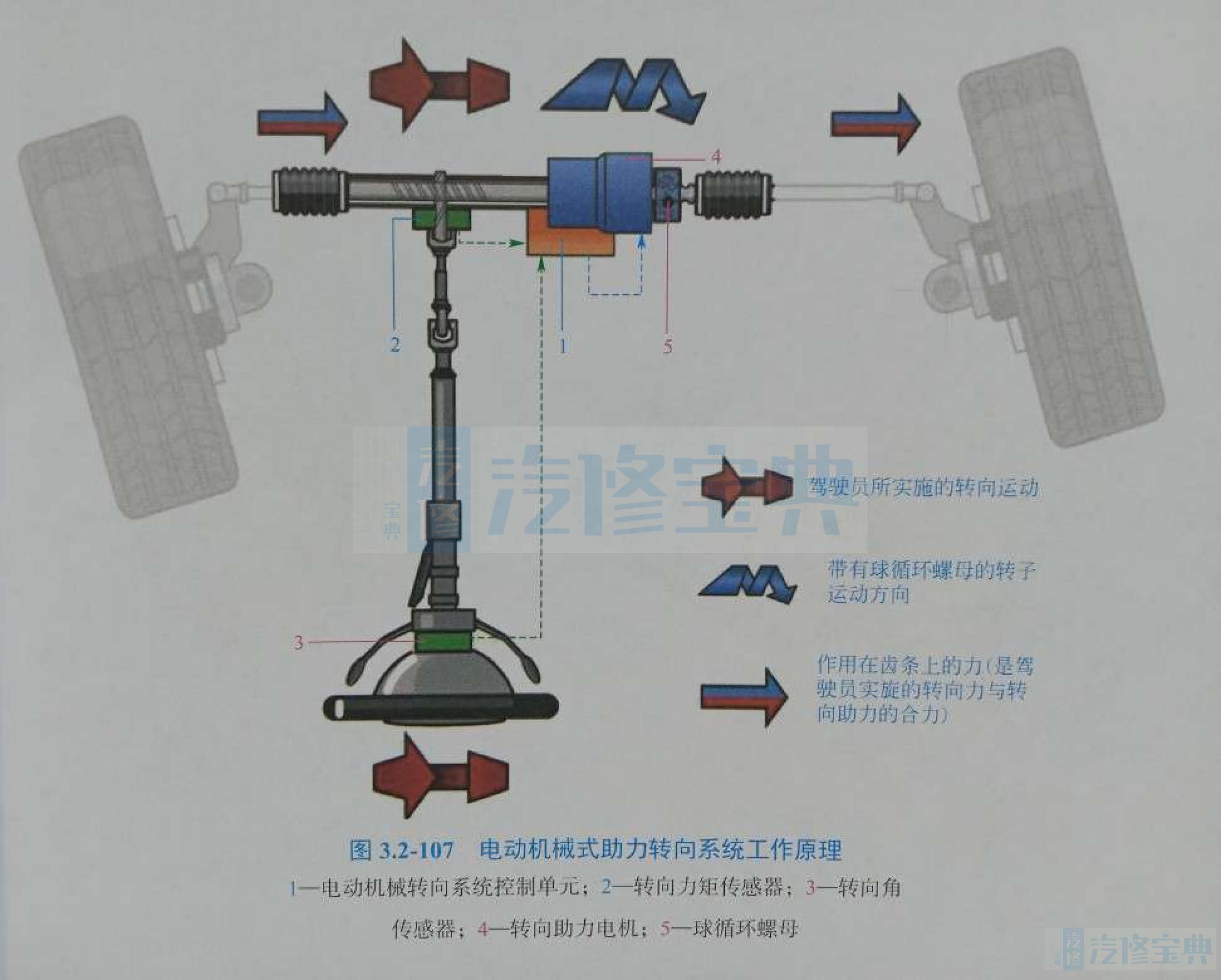
(3)电动机械式助力转向系统工作原理。见图3.2-107。
①打开驾驶员车门。打开驾驶员车门后,数据总线被唤醒,控制单元间开始通信,进行例行的初始化,系统开始自检。
②接通点火开关(15号线接通)。组合仪表内控制单元J285短时激活指示灯进行检查如果确认系统无故障,指示灯在几秒钟后熄灭。
③启动发动机(15号线接通)。如果发动机的转速超过500r/min,那么转向助力系统就处于激活状态。如果扭杆未被转向盘上的作用力扭动(由转向力矩传感器来感知),那么转向角传感器的信号就会与转子位置传感器的信号进行同步。这两个测量值之间的相互依赖关系作为特性曲线存储在控制单元中。在随后的车辆行驶中,通过分析转子位置传感器的信号来感知转向运动。该控制单元会考虑到驾驶模式选择系统中所选择的相应设置情况,以便确定使用哪条助力转向特性曲线去进行调节。
④车辆在行驶中。在车辆行驶过程中,转向助力的强度主要是根据转向力矩、转向角和车速来确定的。电动机的激活电流由控制单元计算出来,定子绕组由末级功放通上相应的电流。电动机通过滚珠丝杠作用到齿条上的力,会增大驾驶员施加在方向盘上的转向力。
⑤断开转向助力。车辆还在行驶中如果关闭了发动机,那么当车速低于某一时速时(如设计为7km/h)助力转向装置就自动关闭。