后桥横自力矩分配(QMVH)有针对性地在后桥的两个车轮之间分配驱动力矩同时,将传统结构类型的后驱动桥增加两个叠加传动装置。该行星齿轮变速器可以在需要时通过盘式制动器拉入力流。 与要求的发动机驱动力矩无关,可以随时在左、右后轮之间主动调整一个最大至1800N·m的驱动力矩差值。这个差值作为偏航力矩作用于整车。主要优点有优化驾驶方向稳定性以及减小转向力,改善牵引力,提高行驶安全性。 后驱动桥上的附加执行器由QMVH控制单元控制。在QMVH控制单元中安装有两个处理器。其中一个处理器控制左侧伺服电动机;另一个处理器控制右侧伺服电动机。此外,每个处理器还监控另一个处理器的输出信号。 QMVH控制单元中安装的大功率半导体起末级作用。因为伺服电动机是交流电动机(异步电动机),借助这些末级产生相电压。如果相电压断开(例如在识别到故障时),则伺服电动机不再受控。但伺服电动机的轴可自由旋转。 下列执行器和传感器直接与QMVH控制单元连接:左侧和右侧伺服电动机;伺服电动机中的温度传感器;转子位置传感器;齿轮油温度传感器。 QMVH控制单元由右后配电器通过总线端K1.30和总线端K1.30B供电。QMVH控制单元连接在 FlexRay上标准转矩区域1:0~250N·m±25N·m。
标准转矩区域2:250~1800N·m±10%。
温度范围:-40~85℃。
与QMVH控制单元的通信失灵时,进行标准检测(整体测试模块)。存在某个控制单元内部故障时,可能出现以下情况:QMVH控制单元内的故障记录;组合仪表上出现检查控制信息。
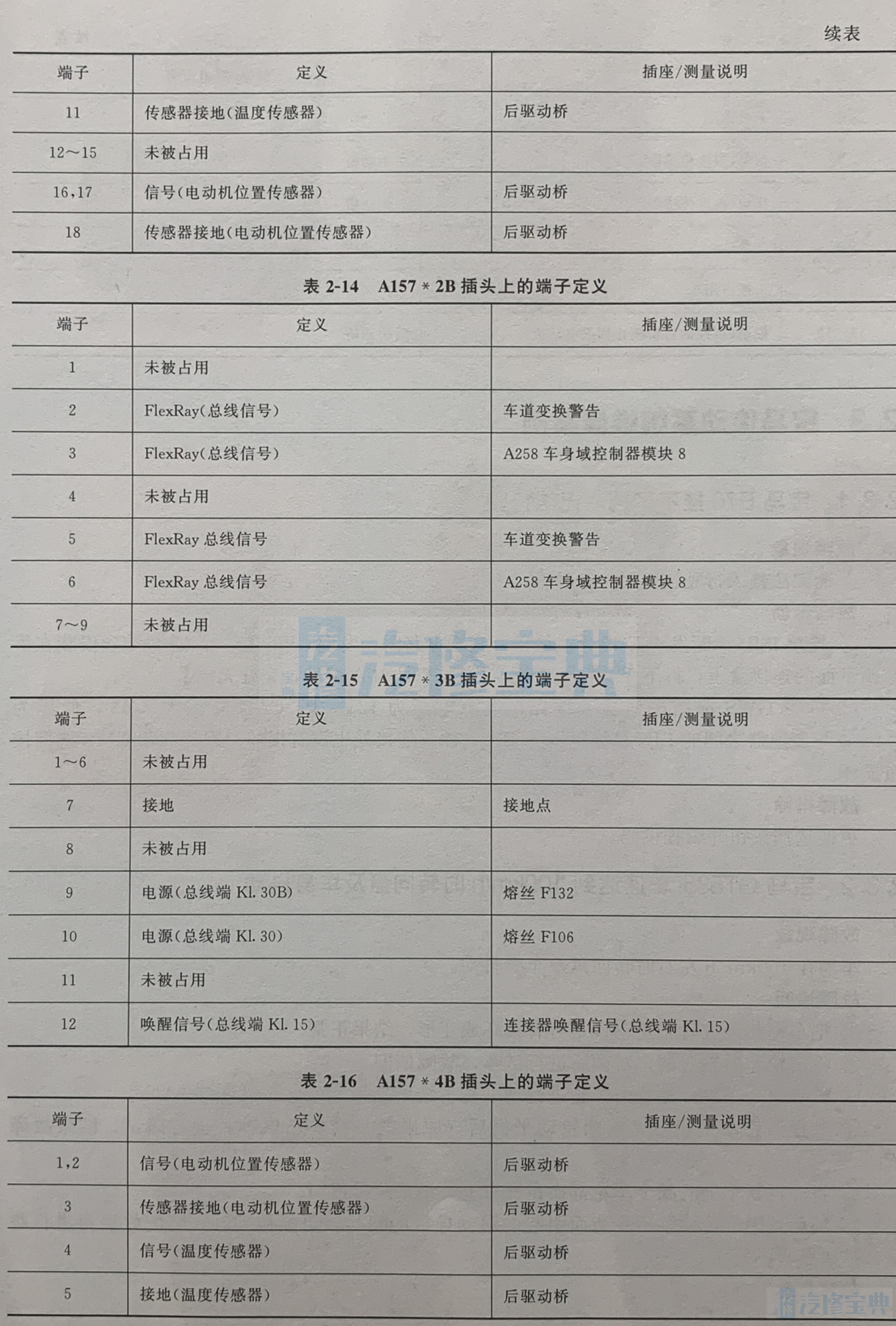
后桥横向力矩分配控制单元安装位置与端子分布如图245所示,端子定义见表2-13~表2-16。