新能源汽车制动系统与传统燃油汽车制动系统的区别不大,主要不同的地方是在传统汽车液压制动系统基础上增加了电动真空助力系统,以及采用制动能量回收模式。以宝马i3电动汽车为例,其制动系统组成部件如图6-1所示。
宝马i3通过制动助力器(4)可为制动踏板(3)踏板力提供支持。制动助力器(4)所需真空由一个电动真空泵(6)根据需要提供。为了确保随时能够提供充足制动助力,在制动助力器(4)上装有一个制动真空压力传感器(5),用于监控所提供的真空,见图6-2。
制动真空压力传感器(5)采用差压传感器设计,相对于当前大气压力测量制动助力器(4)内的当前真空压力。传感器依据应变仪原理工作。在制动真空压力传感器(5)上带有三个电气接口,即5V供电、接地连接和信号导线。应变仪根据制动助力器(4)内的当前真空压力以不同程度变形。它根据变形情况改变电阻。就是说,真空压力增大时电阻和信号电压减小。
电动机电子装置(EME)(1)分析信号从而根据需要控制电动真空泵(6)根据需要进行控制可节省能量,从而有助于提高车辆可达里程。出现故障时与动态稳定控制系统(DSC)(7)进行通信。此时电动机电子装置(EME)(1)与动态稳定控制系统(DSC)(7)之间通过车身域控制器(BDC)(2)进行通信。
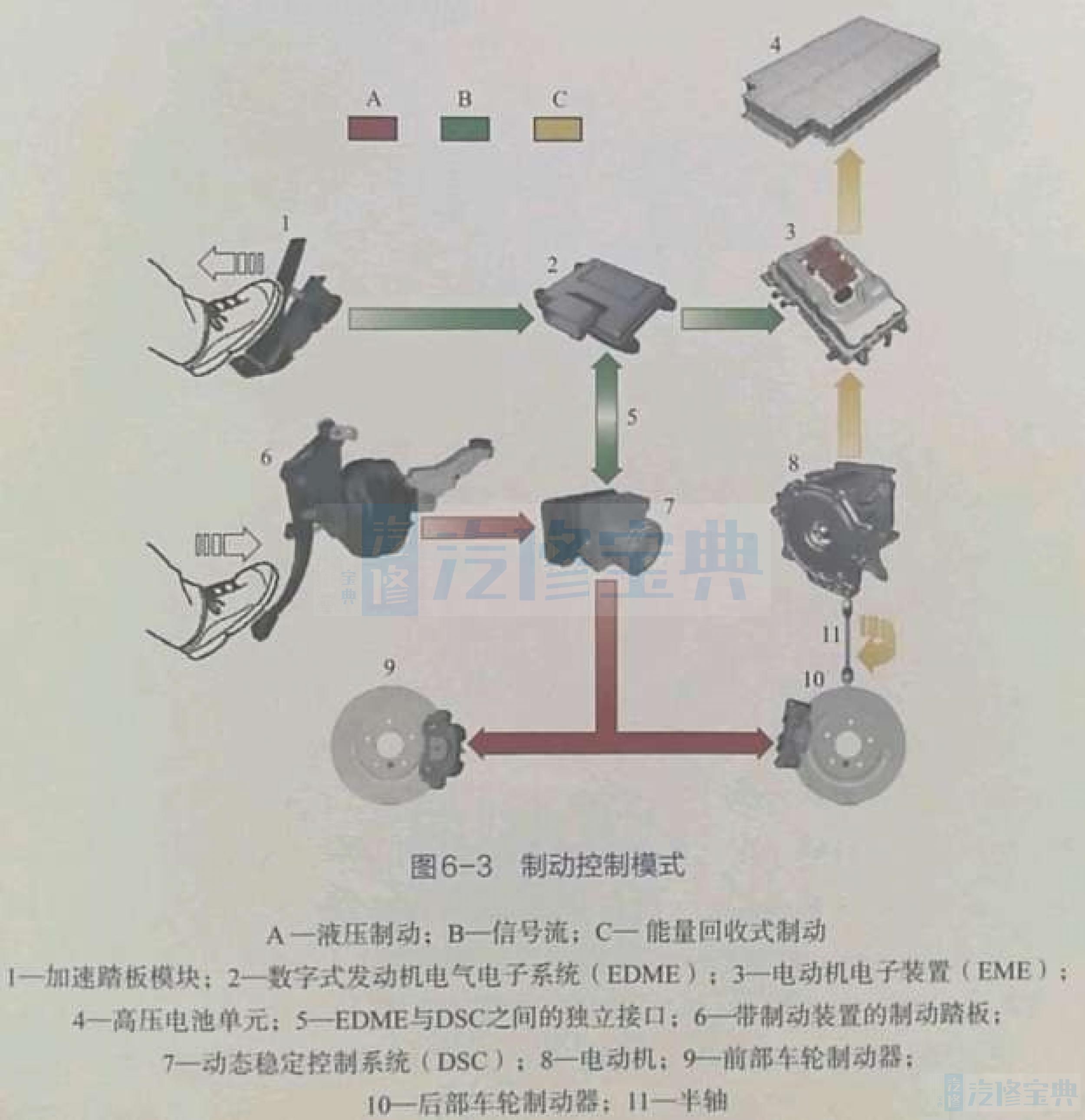
与一般的混合动力车辆不同,宝马i3不使用制动踏板行程传感器,而是采用了特殊加速踏板操作方式。在松开加速踏板模块(1)时由电动机电子装置(EME)(3)以发电机方式控制电动机(8)。这意味着此时车辆后桥车轮通过半轴(11)驱动电动机(8),电动机此时作为发电机运行。此时产生的电动机(8)扭矩以可感知的减速方式作用于后桥车轮。
在此过程中不必操作制动踏板(6)所产生的能量通过电动机电子装置(EME)(3)存储在高压电池单元(4)内。这样就可以通过加速踏板模块(1)控制能量回收式制动(C)通过制动踏板只能进行液压制动(A)。制动模式如图6-3所示。
由数字式发动机电气电子系统(EDME)控制单元(2)要求和调节能量回收式制动(C)如果行驶期间完全松开加速踏板模块(1),数字式发动机电气电子系统(EDME)(2)就会根据行驶状态确定最大能量回收利用。进行最大能量回收利用时以1.6m/s2进行车辆减速。通过 PTCAN2将要求发送至电动机电子装置(EME)(3)。电动机电子装置EME(3)根据数字式发动机电气电子系统(EDME)(2)要求控制电动机(8)。数字式发动机电气电子系统(EDME)(2)带有一个连接 FlexRay数据总线的独立接口(5)。动态稳定控制系统(DSC)(7)位于该总线系统内。动态稳定控制系统(DSC)(7)的任务是识别出不稳定的车辆状态并采取相应措施使车辆准确保持行驶轨迹。在能量回收利用期间识别出不稳定的行驶情况时,动态稳定控制系统(DSC)(7)会通过独立接口(5)发送有关即将出现危险行驶状态的信息。数字式发动机电气电子系统(EDME)(2)确定与危险行驶状态相符的最大能量回收利用并向电动机电子装置(EME)(3)发送要求。电动机电子装置(EME)(3)根据变化的要求减少能量回收利用,从而降低减速度。这种调节方式称为发动机制拖力矩控制(MSR)。
在宝马i3汽车上操作制动踏板时,可像传统制动系统一样在双回路制动系统的液压系统内产生压力。在此通过电动机进行能量回收利用或通过操作车轮制动器实现车辆整个制动过程。