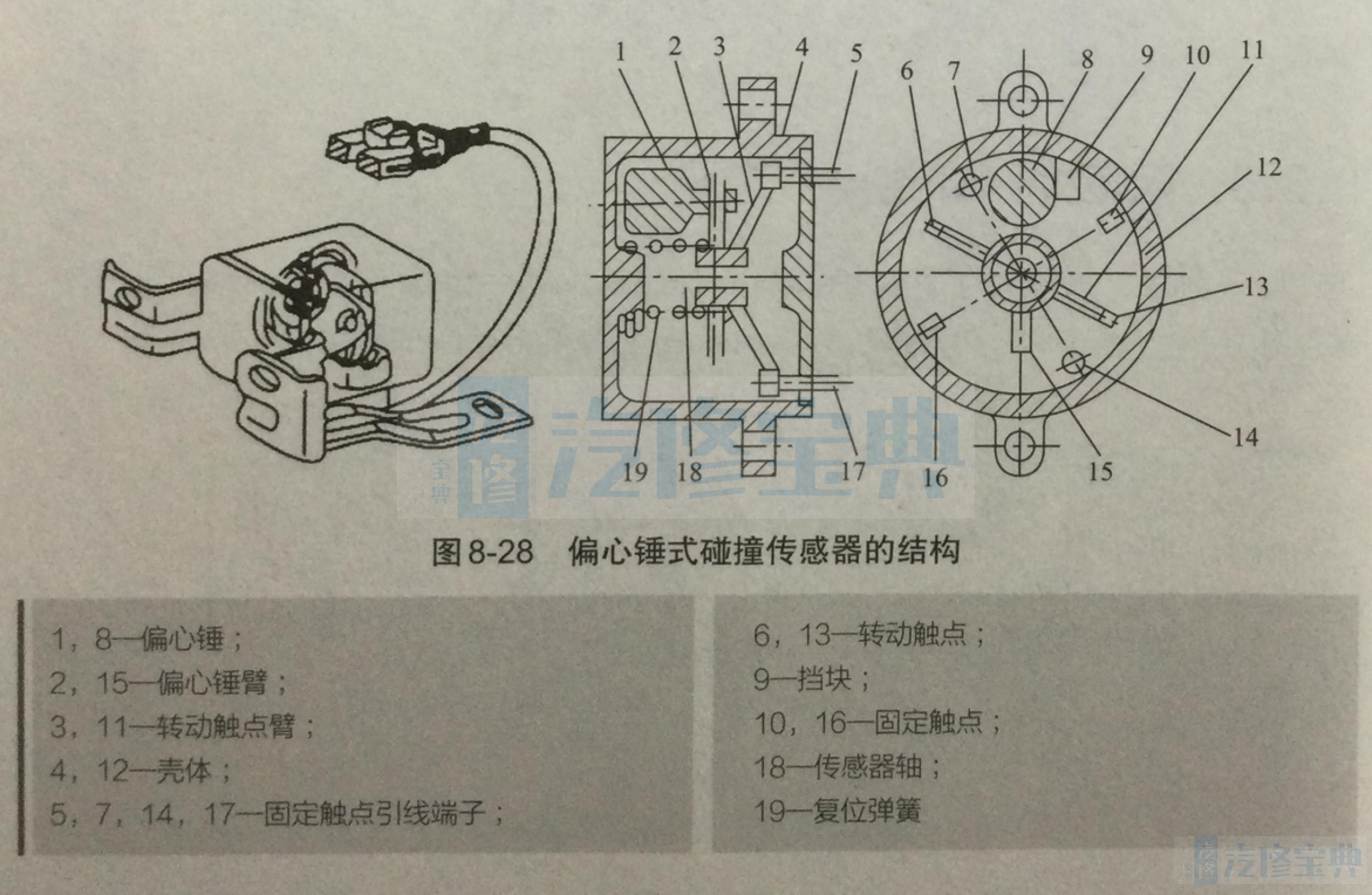
该碰撞传感器又叫偏心转子式碰撞传感器。传感器的结构如图8-28所示,主要由偏心锤、偏心锤臂、转动触点臂及转动触点、固定触点、复位弹簧、挡块和壳体等组成。
当传感器处在静止状态时,在复位弹簧弹力作用下,偏心锤与挡块保持接触,转子处于静止状态,转动触点与固定触点处于断开状态,如图8-29(a)所示当汽车遭受碰撞时,偏心锤的惯性力矩大于复位弹簣的弹力力矩,惯性力矩就会克服弹簧力矩使转子总成转动,从而带动转动触点臂转动,使转动触点与固定触点接触,接通SRS气囊的搭铁回路,如图8-29(b)所示。