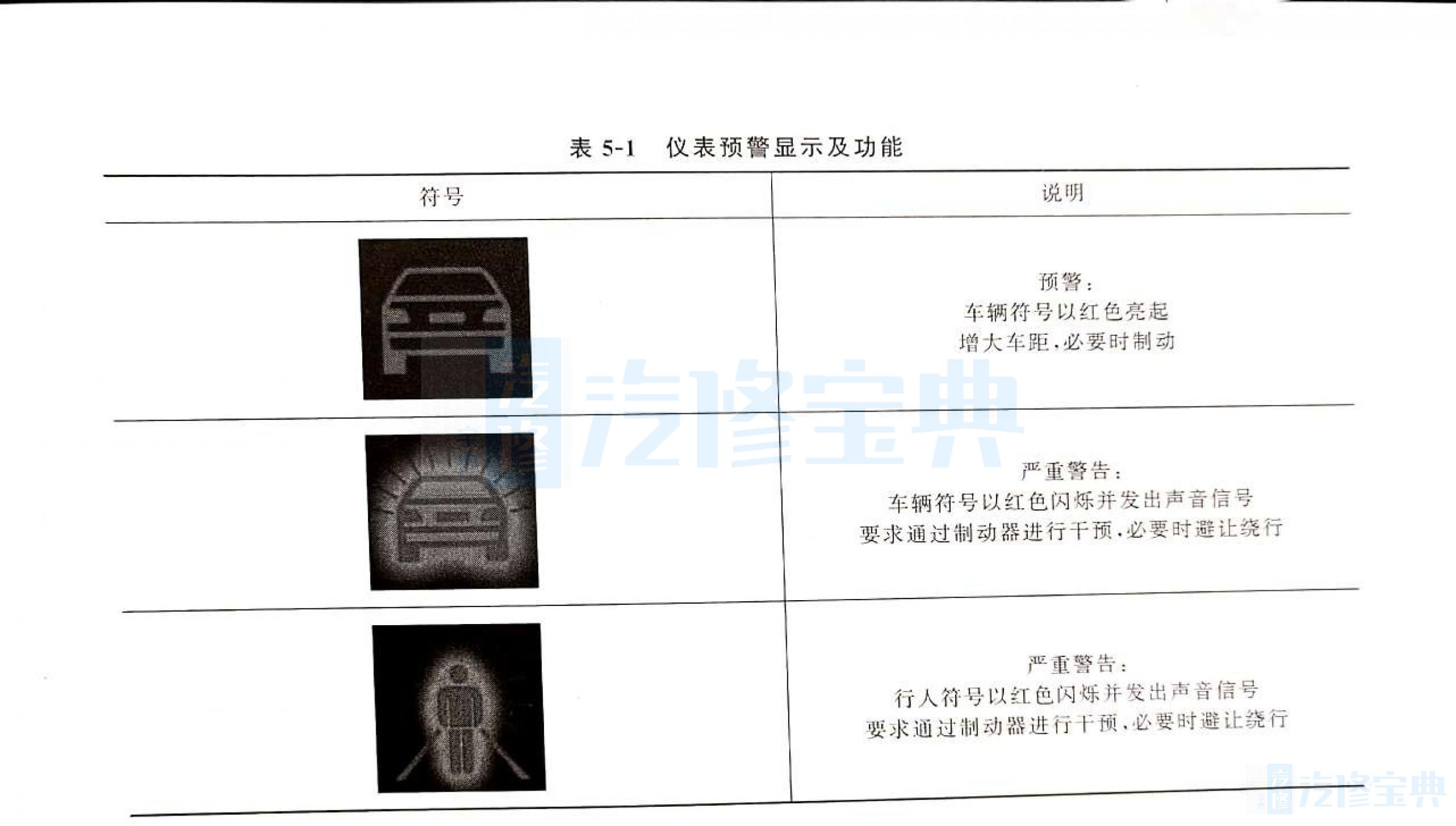
碰撞警告的工作原理基于识别和警告算法。通过图像处理识别出摄像机探测范围内的行人和车辆,将要发生碰撞时会在组合仪表KOMB以及选装配置平视显示屏内显示个警告符号,警告功能分为两级(表5-1)。根据所识别目标的当前移动预测其进一步移动并结合目标移动确定碰撞危险。如果警告算法将某种情况划分为危险等级,就会根据多级警告方案进行警告和制动。针对行人和车辆的警告及制动干预有所不同。
1.预警。
例如由于与前方车辆速度差较高以及与前方或静止车辆距离很近而存在碰撞危险时,就会发出预警。发出预警时,在组合仪表 KOMBI和平视显示屏内亮起红色车辆符号。预警只针对车辆、不针对行人而发出,可在中央信息显示屏CID“智能型安全系统”菜单内设定预警时刻碰撞警告取决于自身车速。针对碰撞警告设计的车距明显小于法规要求的最小车距,因此遵守法规要求的最小车距仍是驾驶员的责任所在。
2.严重警告。
车辆以相对较高的速度差接近前方车辆或行人,即将遇到碰撞危险时,系统会尽可能晚地且仅在即将发生碰撞危险时才发出严重警告,严重警告触发时刻的设计方案为,只有通过马上进行最大制动或通过避让绕行才能避免发生碰撞因此无法通过驾驶员有意触发或控制严重警告功能。严重警告针对车辆和行人而发出例如车辆非常缓慢地接近前方车辆或行人时,即使在车距非常近的情况下也不会发出严重警告。这种有意造成的行驶情况只会触发预警,系统会避免触发意义不大但会造成干扰的严重警告。严重警告无法单独停用,严重警告触发时刻也无法设置。如果不想触发严重警告,必须停用“碰撞警告”前端保护功能。
发出严重警告时,在组合仪表 KOMBI和平视显示屏内闪烁红色车辆符号和行人符号此外还发出一个声音警告信号。在10~60km/h车速范围内发出针对行人的严重警告,在约5km/h以上车速发出针对车辆的严重警告发出严重警告时也会使制动系统预先做好准备,以便更迅速、更有效地进行减速。通过这些措施可在发出警告的同时为驾驶员提供有针对性的支持,从而能够有效做出反应注意:严重警告不能免除驾驶蘋裉据交通情况调节车速和驾驶方式的责任。
3.制动干预。
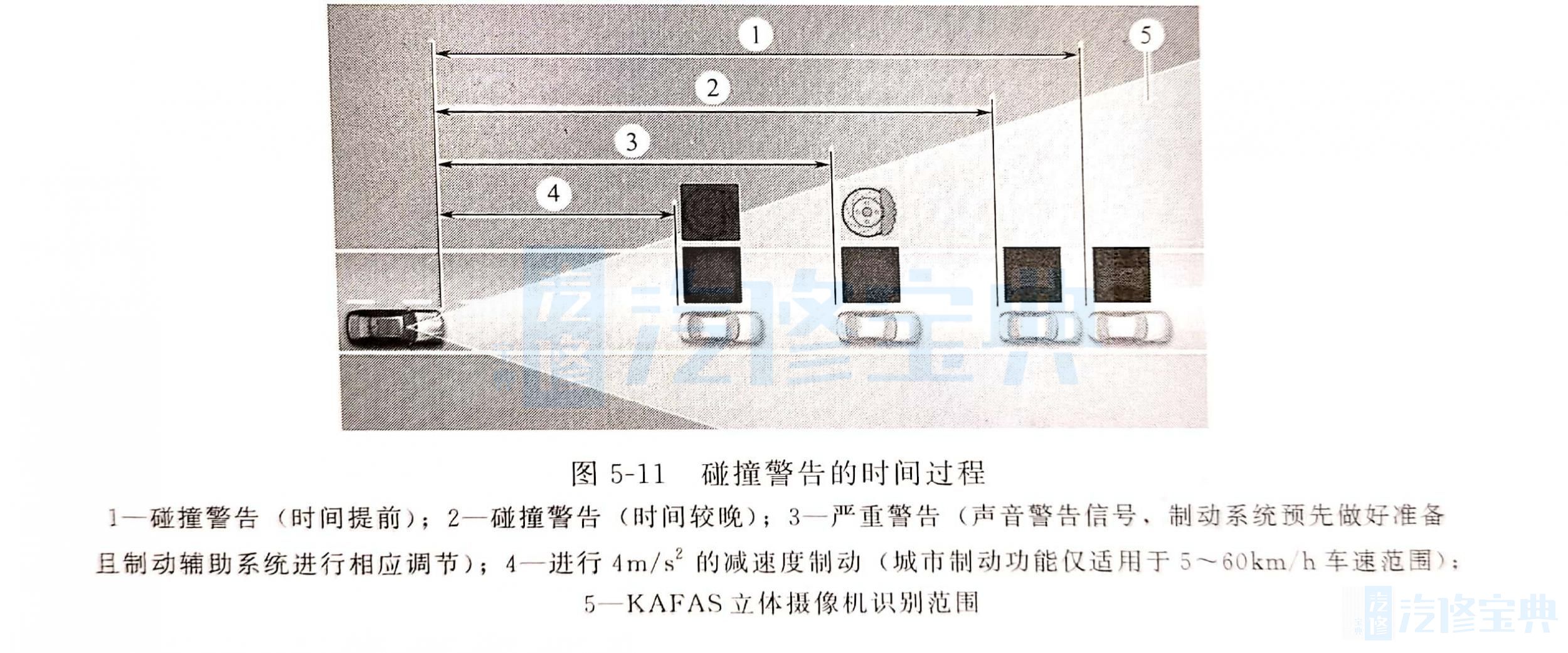
如果驾驶员无法通过自身反应避免事故,作为最后一步就会自动进行制动干预,通过约4m/s2的减速度进行制动,在不超过约18km/h的速度差条件下可避免发生事故,如果速度差较高,就会以少量形式降低碰撞速度。与驾驶员能够支持系统作用一样,驾驶员也可随时通过转向移动(避让绕行)、加速或紧急制动干预对自动紧急制动进行控制,从而终止该功能在10~60km/h车速范围内进行针对行人的制动干预,在5~60km/h车速范围内进行针对车辆的制动干预。执行制动干预需要接通动态稳定控制系统DSC。图5-11展示了碰撞警告的时间过程。识别出驾驶员进行避让绕行时,不会进行制动干预。