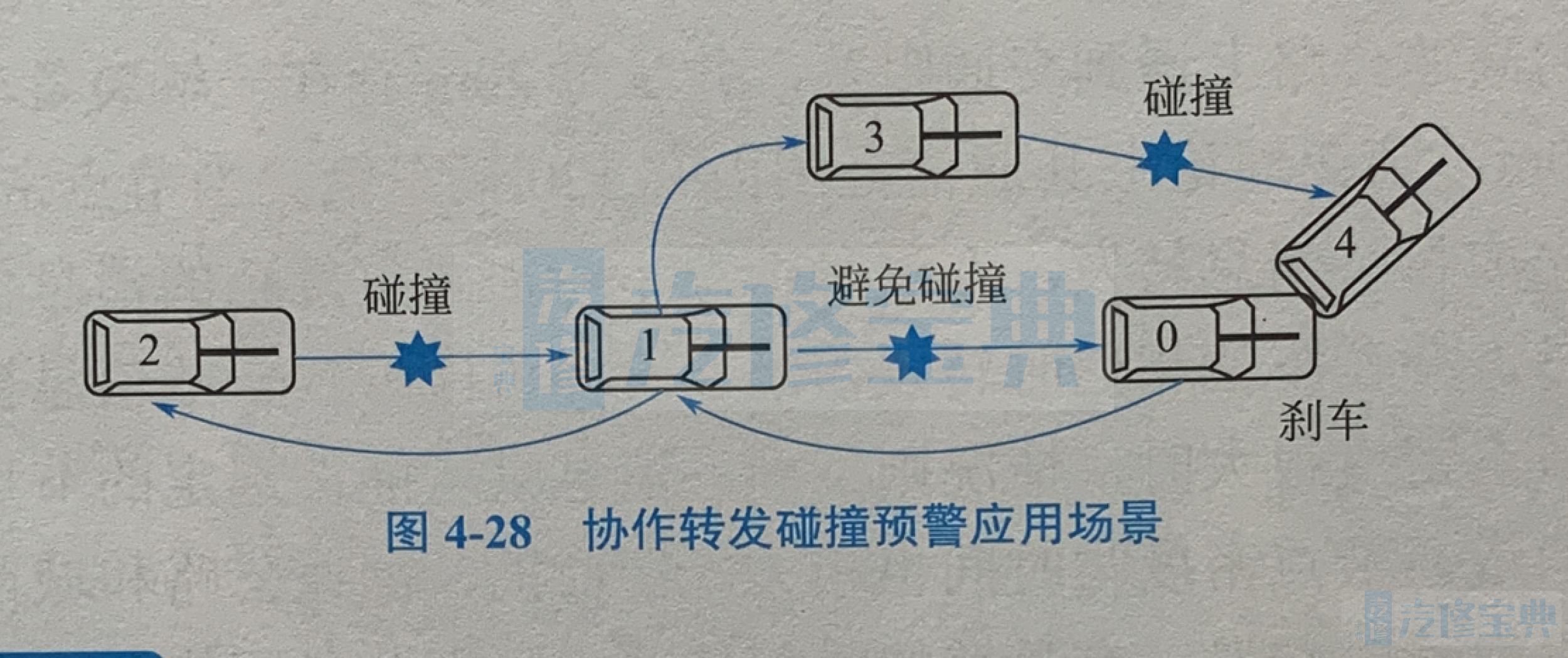
1.碰撞预警如图4-28所示,车辆0与车辆4相撞,车辆0因此发送一个协作转发碰撞预警信息。车辆1能够通过直接连接接收到碰撞预警信息,从而车辆1可以及时地刹车避免碰撞。但是,如果没有间接连接,即不能多跳转发信息,若车辆2、车辆3与它们前面车辆的距离小于安全距离时,则车辆2和车辆3的碰撞是不可避免的。如果有间接连接,车辆2和3也能收到碰撞预警信息,则可以避免碰撞。
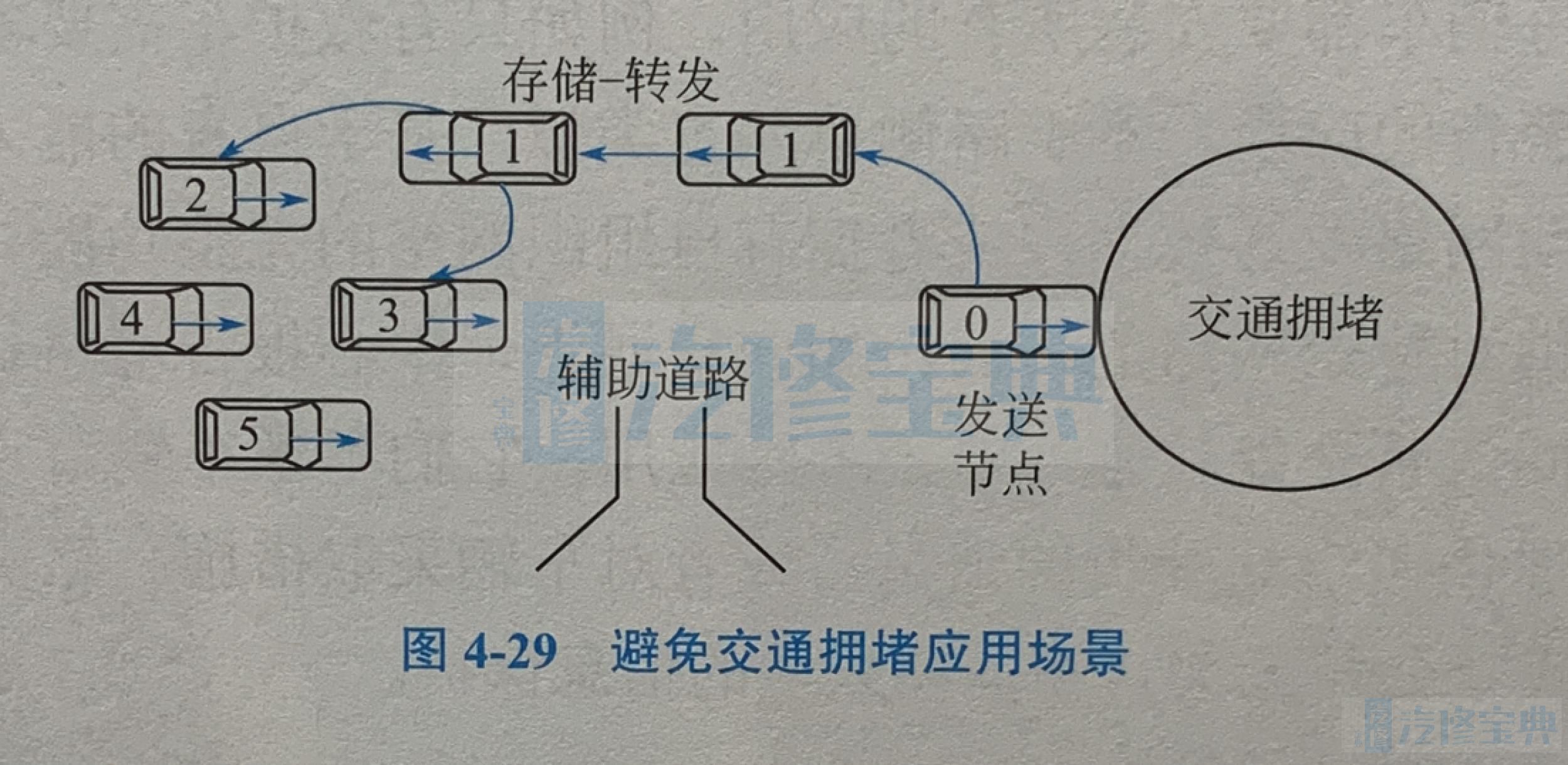
2.避免交通拥堵如图4-29所示,车辆1收到了车辆0发送节点发送出的前方交通拥堵消息,然后车辆1存储该消息,直到车辆2~车辆5能够与车辆1通信时,车辆1将消息转发给车辆2~车辆5,这样,车辆2~车辆5也同样知道了前方拥堵的情况,这些车辆可以选择辅助道路行驶,从而避免交通堵塞,节省了时间。
3.紧急制动警告如图4-30所示,当前方车辆紧急制动时,紧急制动警告(EBW)将会提醒驾驶员。当制动车辆被其他车辆遮挡而不能被本车辆觉察时,EBW将会非常有用。
通过系统开启车辆的后制动灯,EBW利用车载自组织网络系统的非视距特点来防止追尾事故。
4.并线警告如图4-31所示,当车辆换道可能存在危险时,并线警告(LCW)将提醒有意换道的驾驶员。LCW使用V2V通信和周边车辆的路径预测,利用链路的通信范围来预测驾驶员完成换道可能产生的碰撞。路径预测用于确定3~5s内,驾驶员要到达的车道区域是否被占用。如果该车道已被占用,则LCW将会提醒驾驶员潜在的危险。
5.交叉路口违规警如图4-32所示,当驾驶员即将闯红灯时,交叉路口违规警告(IVW)系统对其发出警告。ⅣW系统使用V2I通信方式,主车辆进行预测,其通信链路的主要优势是获取动态信息,如红绿灯阶段和红绿灯时间。部署了交通信号灯控制器的
路侧单元会广播交通信号灯信息,包括位置、红绿灯阶段、红绿灯时间、交叉路口几何形状等。靠近交叉路口的车辆将车辆的预期路径与交通信号灯信息进行比较,以确定是否会发生交通信号违规。如果车辆将要发生违规行为,则ⅣW系统将提醒驾驶员,同时车辆也会发送消息至红绿灯和周围车辆,以表明警告已经发出。
随着车载自组织网络技术的发展,其应用范围越来越广泛,主要涉及安全驾驶、公共服务、商用、娱乐等。