汽车自适应前照明系统主要由传感器单元、CAN总线传输单元、控制单元和执行单元等组成,如图3-51所示。传感器单元采集车辆当前信息(如车速、车辆姿态、转向角度等)和外界环境(如弯道、坡度和天气等)的变化信息,通过CAN总线传输单元输送给控制单元,控制单元需要对车辆行驶状态做出综合判断,输出脉冲变量给执行单元,控制两个电机调节前照灯的照射距离和角度,整个过程无须驾驶员人工介入从而自动调节。 当转动转向盘时,传感器自动检测转向角度和车速的信号,控制单元需要对
周围环境进行判断,随着这种环境的改变不断的修整参数、精确分析并发送精确的前照灯操作控制指令给执行单元—车头大灯组内水平和垂直安装的转向电机令其随着车辆动态行驶进行实时调整,让照明光束始终与道路保持一致,这样驾驶员能够清楚地看到即将出现的弯道上的路况以便及时采取预防或者紧急避险措施。
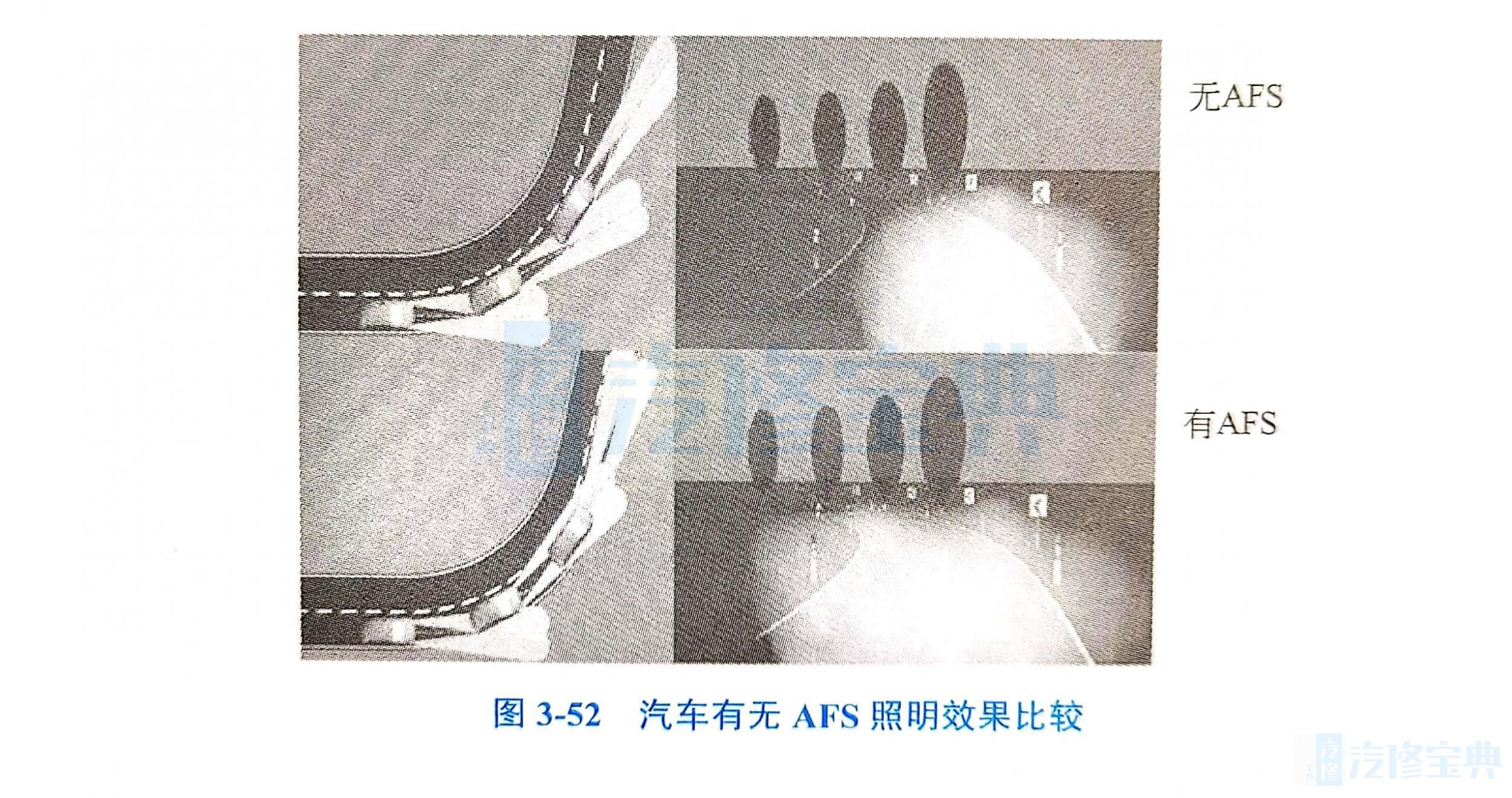
图3-52所示为有无AFS照明效果图。可以看出,AFS的转向灯能够根据转向盘的角度转动,把有效的光束投射到驾驶员需要看清的前方路面上。