驱动电动机采用永磁无刷直流电动机,其控制器冷却方式为强制风冷,控制器的控制方式有2种:一种是模拟量控制;另一种是CAN总线通信控制。 1.功能。 (1)系统控制功能 系统控制功能是控制器的基本功能,主要控制项目有电动机的启动、停止、正反转等操作。系统采用转矩控制模式,油门输入信号与电动机输出转矩的大小相对应。 (2)预充电完成控制功能 在永磁无刷直流牵引电动机控制器中的直流母线并联一个容量很大的电容。在供电时,主接触器闭合瞬间有很大的电容充电电流,在主接触器触点之间产生电弧,会烧蚀主接触器触点,影响主接触器的使用寿命,严重的还会使主接触器触点烧结在一起,使主接触器失去控制功能。另外,主接触器触点闭合刹那间还会产生电压较高的浪涌电压,可能超过控制器内部功率模块的耐压,将会烧毁控制器内部功率模块。为了防止以上情况的发生,需要在控制器供电时对控制器进行预充电。在给控制器供电时,在其母线上串联一个电阻,当控制器两端电压充到一定数值时,闭合主接触器,此时将预充电串联的电阻短路,完成供电过程。这个功能就是在供电时检测控制器母线端电压,当达到母线电压的70%时,接触器触点闭合信号被输出,完成预充电功能。
(3)CAN总线通信及控制功能 江准同悦纯电动轿车X1022配有CAN通信接口,将牵引电动机的运行状态、报警信息等内容传送到仪表进行显示,告知驾驶人;或者传送到整车控制器(VCU),使VCU对当前车辆的运行状态进行监测和统一调度。另外也可以通过CAN总线控制牵引电动机的运行,包括牵引电动机的启停、换向、电动机输出转矩的控制等。尤其在驾驶控制台距离牵引电动机控制器较远的情况下,CAN总线控制在抗干扰和控制信号衰减方面,要优于模拟量传输控制信号。
(4)系统保护功能 在出现故障时,为了使电动机及控制器能够保障系统安全可靠运行以及保护部件不会损坏,特设置7个保护功能。
①位置传感器信号错误保护功能永磁无刷直流电动机(BLDC)位置传感器的信号十分重要,电动机的换相控制都是依据位置传感器信号而进行的。如果位置信号出现错误,会导致牵引电动机工作不正常,严重的会使牵引电动机控制器损坏,这是一个致命性的故障。
因此,检测到位置信号出错时立即锁死牵引电动机控制器的输出,系统便停止运行。
②过流保护流过牵引电动机的电流超过牵引电动机控制器最大限制电流,或者发生短路时产生较大电流,会有故障信号输出,同时锁死牵引电动机控制器输出。
③牵引电动机控制器过温保护当检测到牵引电动机控制器散热器的温度超过353K时,整车控制器(vCU)开始执行限功率功能。如果牵引电动机控制器继续升温,达到363K时,VCU将锁死牵引电动机控制器输出。牵引电动机控制器过温保护是在工作温度353~363K之间进行线性降功率调节。
④欠压保护输入给牵引电动机控制直流母线的电压低于260V时,整车控制器将提供欠压报警信号,此时牵引电动机控制器并不锁死输出,只是提醒电池处于欠压状态。当牵引电动机在运行过程中被检测到母线电压低于220V时,将输出极低的电压报警信号,并锁死牵引电动机控制器的输出。因为母线电压低到一定程度,牵引电动机控制器内的控制部分的电压输出将出现不稳定的现象,有可能使功率器件错误工作,造成牵引电动机控制器的损坏。
⑤单体电池过温保护 单体电池温度超过使用设定值时,牵引电动机控制器会自行降低功率运行,单体电池温度超过极限值时,电池会自动停止输出,以免对电池造成损害。
⑥通信故障报警 在使用CAN总线方式进行电动机控制的时候,如果牵引电动机控制器在3s内没有收到整车控制器VCU的指令,将被判断为通信故障,此时停止牵引电动机控制器的输出,即使通信又恢复正常,那么牵引电动机控制器仍然处于锁定状态,除非对牵引电动机控制器进行人工操作复位。
⑦误挂倒挡保护 车辆在正常行进中若错误挂入倒挡会带来十分严重的后果,为此设置了反方向挡位无效的程序。当检测到反方向输入信号时,会自动弃之不予采纳,仍然维持原有的运行模式,只有当车辆完全静止时,才能进入反方向运行。
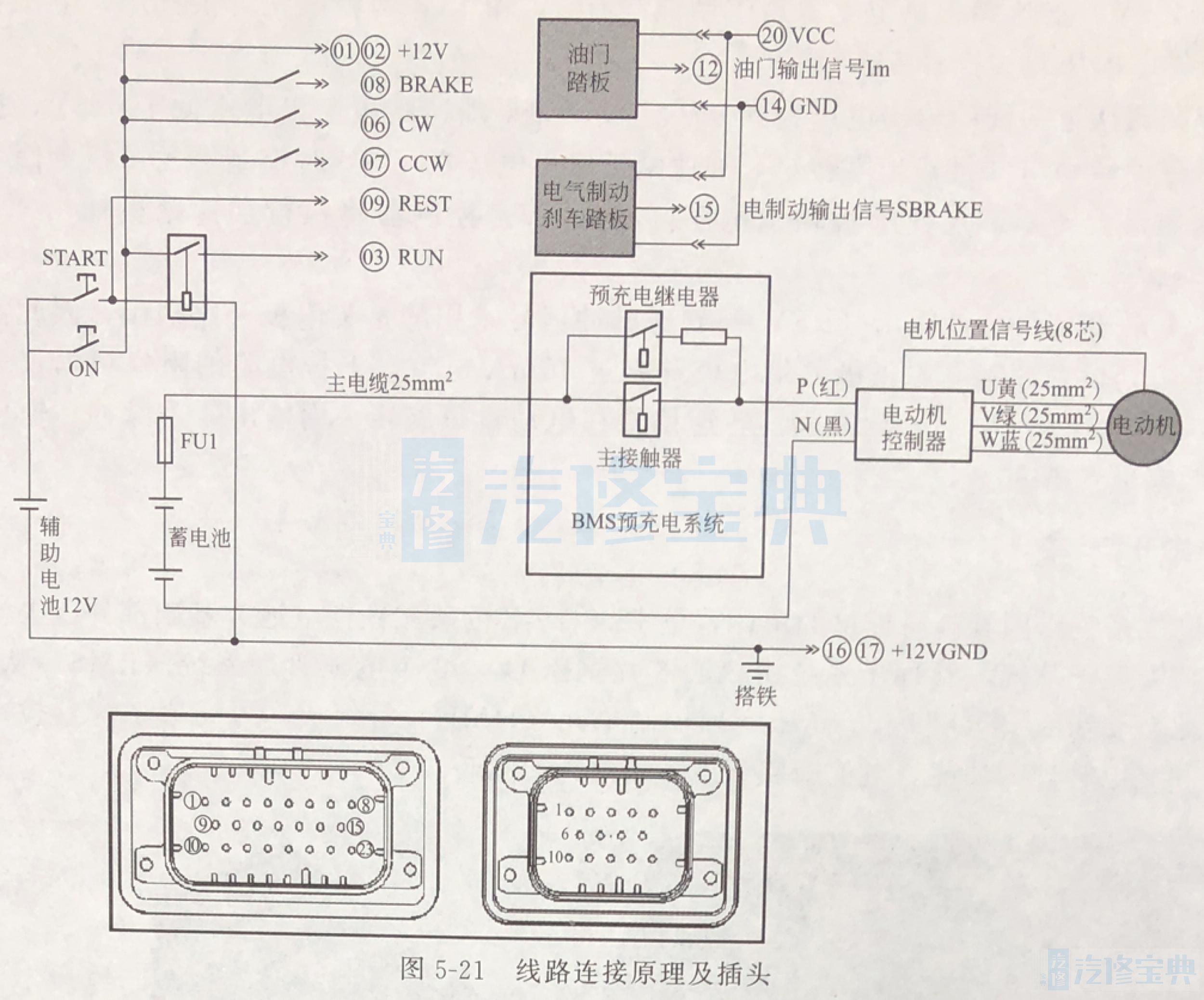
2.线路连接说明。
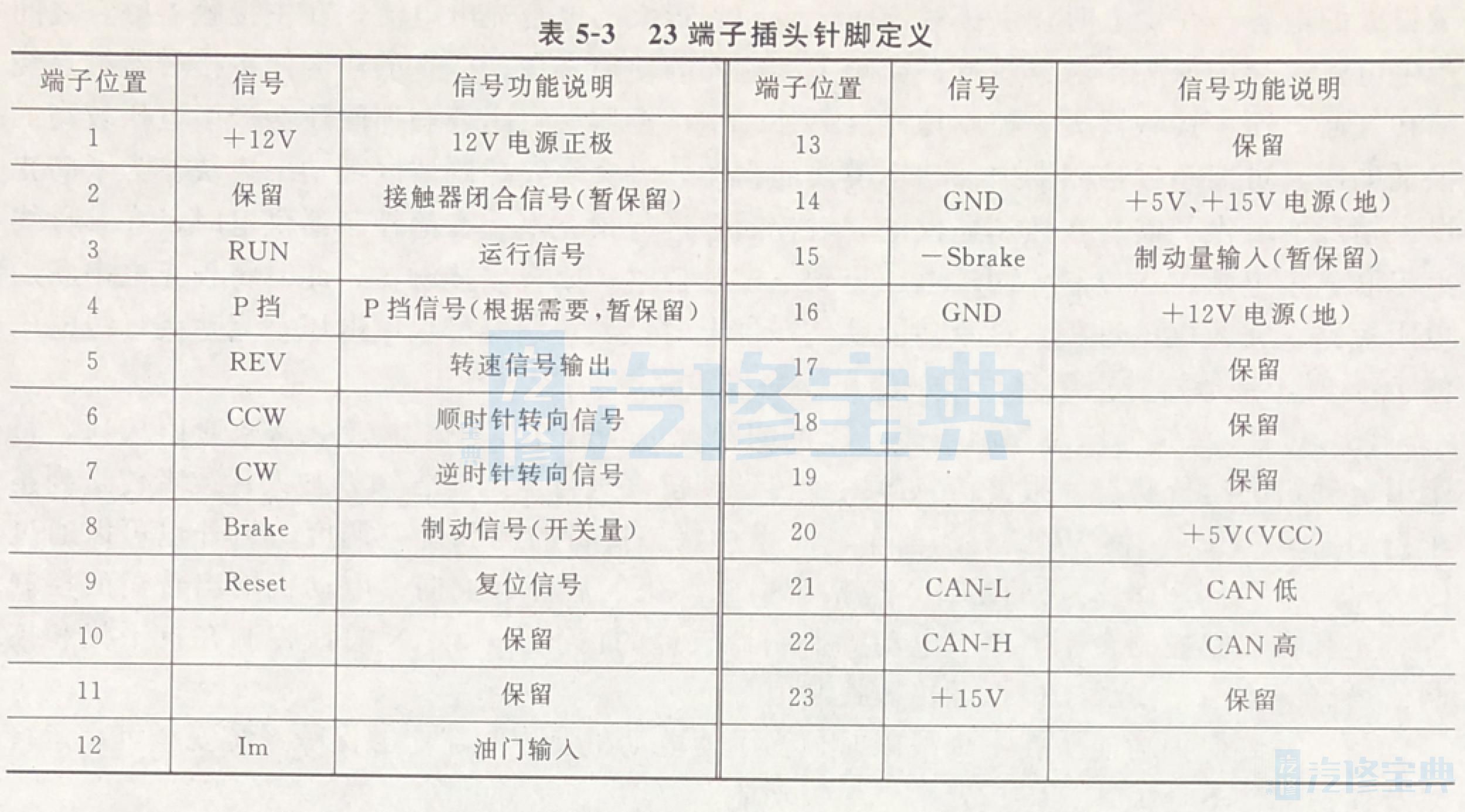
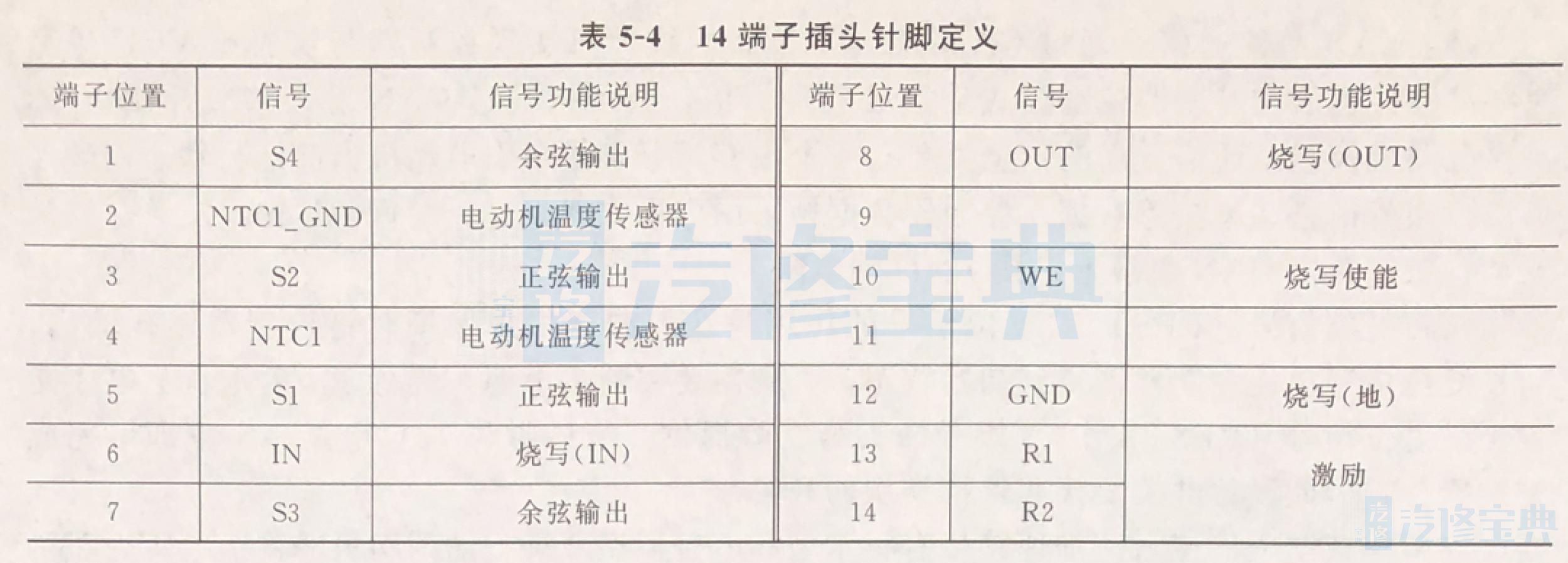
线路连接原理及插头如图5-21所示,其端子含义如表5-3和表5-4所示。
(1)预充电系统 预充电系统位于电池管理系统(BMS)内部,通过预充电继电器和限流电阻对电动机控制器内部电容进行预充电,待电容电压上升到设置值后再接通主接触器。此系统可有效防止蓄电池主回路上电瞬间的电流过冲,延长蓄电池及主接触器触点的使用寿命,提高系统的可靠性。
(2)电动机旋向信号的接入 CCW、CW为电动机旋向信号(23端子插头6、7脚),CCW表示牵引电动机逆时针旋转,CW表示牵引电动机顺时针旋转。这里需要说明的是电动机的旋转方向是从电动机的轴伸方向进行判断。旋转信号是开关量输入,当信号线与12V电源相接时,信号为高电平(有效);当信号线悬空时则为低电平(无效),牵引电动机旋转方向信号必须是相异的信号,同时过高或过低都视为空挡,此时牵引电动机将不运转。
(3)运行信号(RUN) 运行信号为开关信号,该信号是控制器的使能信号,若要使系统运行此信号,必须置于高电平,否则系统将不工作。运行信号也可以作为闭锁信号使用。
(4)CAN总线通信 通过CANH、CANL两线即可实现控制器与仪表或VCU等其他部件进行通信。控制器控制模式配置成数字通信,就可以通过CAN总线接收控制指令,实现电动机控制。通信发送的信息主要有4个内容,分别是牵引电动机当前运行状态、转速信息、报警信息和电流等数据。控制器数据帧采用广播方式发送,每间隔50ms发送一帧数据帧,控制器内CAN总线上已接120Ω端电阻。
(5)复位信号(REST) 复位信号的作用是在控制器出现保护时将控制器锁死输出通过复位信号可使控制器恢复到初始状态,否则需要关断主电源,等待30s后重新上电才能复位。复位信号(REST)由23端子插头第9脚提供。当该脚与12V电压碰一下即可完成复位操作,因此复位开关要接非保持类型的开关。
(6)加速踏板的接入 加速踏板有霍尔型和电位器型2种,油门踏板的输出电压为5V,不能高于5V。加速踏板供电电源霍尔型油门有5V和15V两种电压可供选用,电位器型油门踏板供电电压只能选择5V。
控制器认可的油门输出电压为0.8~4.5V,如果加速踏板输出电压低于0.8V,控制器发出指令使牵引电动机输出零转矩,加速踏板输出电压在4.5V时控制器发出指令使牵引电动机输岀最大转矩,加速踏板输出电压高于4.5V,控制器将执行加速踏板输出4.5V的指令。
(7)转速信号脉冲输出(REV) 转速脉冲信号采用的是集电极开路输出,因此需要接上拉电阻到仪表控制电源正极,集电极开路过10mA电流,上拉电阻的阻值根据仪表供电电压匹配,一般在1~10kΩ之间。转速信号在电动机每旋转一周输出4个脉冲,输出脉冲的高低电平各占50%。