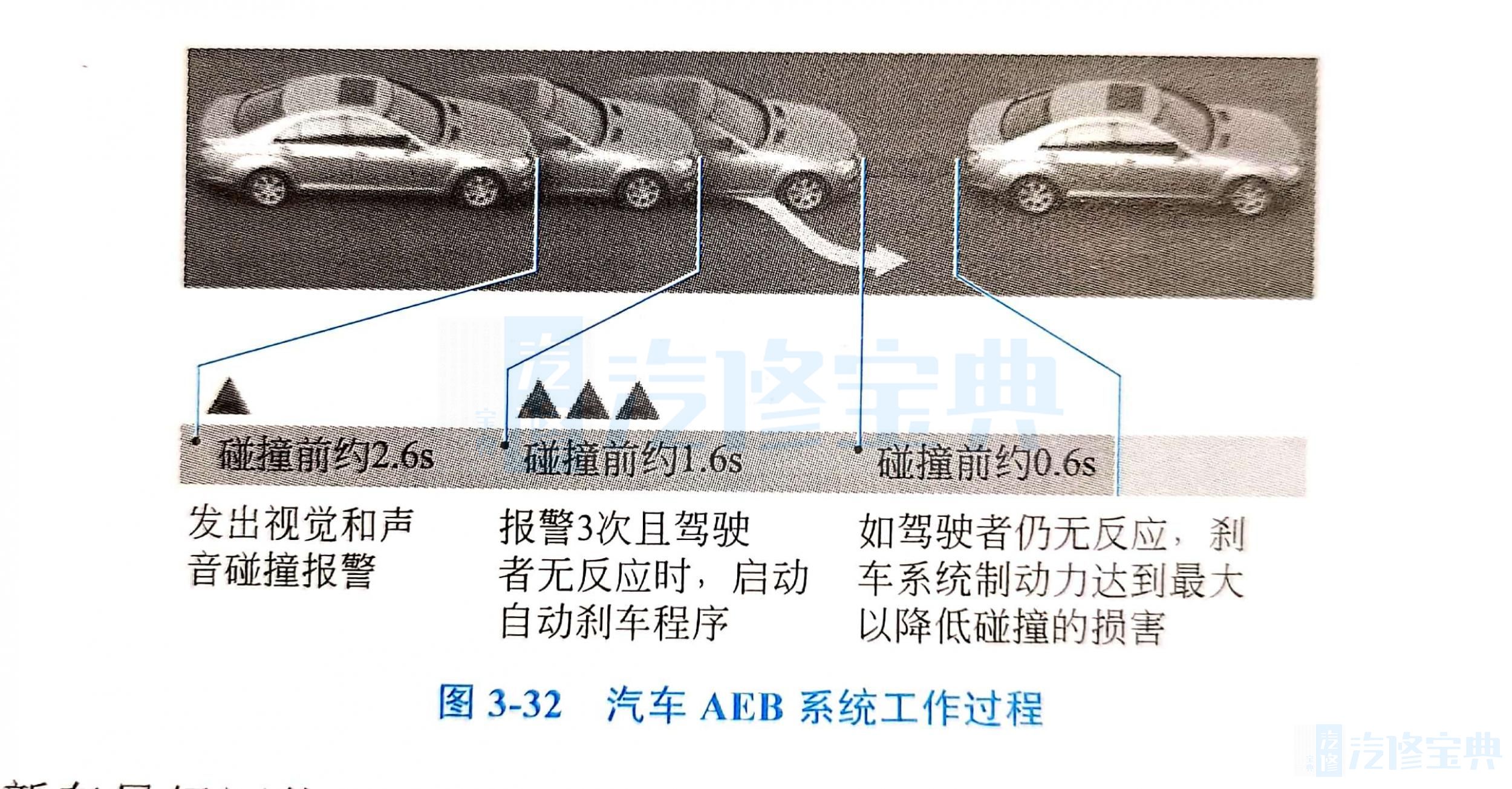
汽车AEB系统采用测距传感器测出与前车或者障碍物的距离,然后利用子控制单元将测出的距离与报警距离、安全距离等进行比较,小于报警距离时就进行报警提示,而小于安全距离时即使在驾驶员没来得及踩制动踏板的情况下AEB系统也会启动,使汽车自动制动,从而为安全出行保驾护航图3-32所示为某汽车AEB系统工作过程示意图。
欧洲新车星级评价(E-NCAP)以多年来统计的事故数据作为依据,对汽车AEB系统使用环境提出以下3种应用需求。
(1)城市专用AEB系统一般的城市交通事故大多发生在路口等待、交通拥堵等情况下,因为驾驶员注意力分散,忽视了自身的车速和与前车的距离,造成碰撞事故。城市内驾驶特点是速度慢,易发生不严重的碰撞。城市专用AEB系统可以监测前方路况与车辆移动情况,如果探测到潜在的风险,它将采取预制动措施,提醒驾驶员风险的存在:如果在反应时间内未接到驾驶员的指令,该系统则会自动制动来避免事故。而在任何时间点内,如果驾驶员采取了紧急制动或猛打转向盘等措施,该系统将停止。城市专用型AEB系统在车速不超过20km/h情况下工作,该速度下集中了80%的城市交通事故。
(2)高速公路专用AEB系统在高速公路上发生的事故与城市交通事故相比,其特点不同。高速公路上的驾驶员可能由于疲劳驾驶,当意识到危险时车速过快无法控制车辆。为了能保证这种行驶情况下的安全,AEB系统必须能用相应的控制策略来应对。系统在车辆高速行驶状态下工作,首先通过报警来提醒驾驶员潜在的危险。如果在反应时间内,驾驶员没有任何反应,第二次警示系统将启动(比如突然的制动或安全带收紧),此时制动器将调至预制动状态:如果驾驶员依然没有反应,那么该系统将会自动实施制动。
(3)行人保护专用AEB系统除探测道路上的车辆外,还有一类AEB系统是用来检测行人和其他公路上弱势群体的。通过车上一个前置摄像头传来图像可以辨别出行人的图形和特征,通过计算相对运动的路径,以确定是否有撞击的危险。如果有危险,系统可以发出警告,并在安全距离内,制动系统采用全制动使车辆停止行驶。实际情况下预测行人行为是比较困难的,系统控制的算法也非常复杂。该系统需要在危险发生前更迅速地做出正确判断,更有效地做出响应防止危险事态发生,同时也需要避免系统在特定情况下发生误触发。