FlexRay是一种用于汽车的高速可确定性的、具备故障容错的总线系统。汽车中的控制器件、传感器和执行器之间的数据交换主要是通过CAN网络进行的。然而新的线控技术( X-by-wire)系统设计思想的出现,导致车辆系统对信息传送速度尤其是故障容错与时间确定性的需求不断增加。 Flex Ray通过在确定的时间槽中传送信息,以及在两个通道上的故障容错和冗余信息的传送,可以满足这些新增加的要求Flex ray总线网络具有以下特点。 ①数据传输速率高。 FlexRay网络最大传输速率可达到10 Mbit/s,双通道总数据传输速率可达到20 Mbius,因此,应用在车载网络上, FlexRay的网络带宽可以是CAN网络的20倍。 2可靠性好。 FlexRay能够提供很多CAN网络所不具有的可靠性特点,尤其是 FlexRay具备的冗余通信能力。具有冗余数据传输能力的总线系统使用两个相互独立的信道,每个信道都由一组双线导线组成。一个信道失灵时,该信道应传输的信息可在另一条没有发生故障的信道上传输。此外,总线监护器的存在进步提高了通信的可靠性。 ③确定性。 FlexRay是一种时间触发式总线系统,它也可以通过事件触发方式进行部分数据传输。在时间控制区域内,时隙分配给确定的信息。一个时隙是指一个规定的时间段,该时间段对特定信息开放。对时间要求不高的其他信息则在事件控制区域内传输。确定性数据传输用于确保时间触发区域内的每条信息都能实现实时传输,即每条信息都能在规定时间内进行传输。 ④灵活性。灵活性是 FlexRay总线的突出特点,反映在以下方面:支持多种方式的网络拓扑结构,如点对点连接、串级连接、主动星形连接、混合型连接等信息长度可配置,可根据实际控制应用需求,为其设定相应的数据载荷长度:双通道拓扑既可用于增加带宽,也可用于传输冗余的信息:周期内静态、动态信息传输部分的时间都可随具体应用而改变。 为了满足不同的通信需求, FlexRay在每个通信周期内都提供静态和动态通信段。静态通信段可以提供有界延迟,而动态通信段则有助于满足在系统运行时间」内出现的不同带宽需求。 FlexRay帧的固定长度静态段用固定时间触发的方法来传输信息,而动态段则使用灵活时间触发的方法来传输信息。 FlexRay网络具有速度快、效率高、容错性强等特点,可用于汽车动力和底盘系统的控制数据传输。 ①替代CAN总线。在数据传输速率要求超过CAN的应用会采用两条或多条CAN总线来实现, FlexRay将是替代这种多总线解决方案的理想技术。 ②用作“数据主干网”。 FlexRay具有很高的数据传输速率,且支持多种拓扑结构,非常适合于车辆主干网络,用于连接多个独立网络。 ③用于分布式测控系统。分布式测控系统用户要求确切知道消息到达时间,
且消息周期偏差非常小,这使得 FlexRay成为首选技术,如用于动力系统、底盘系统的一体化控制中。
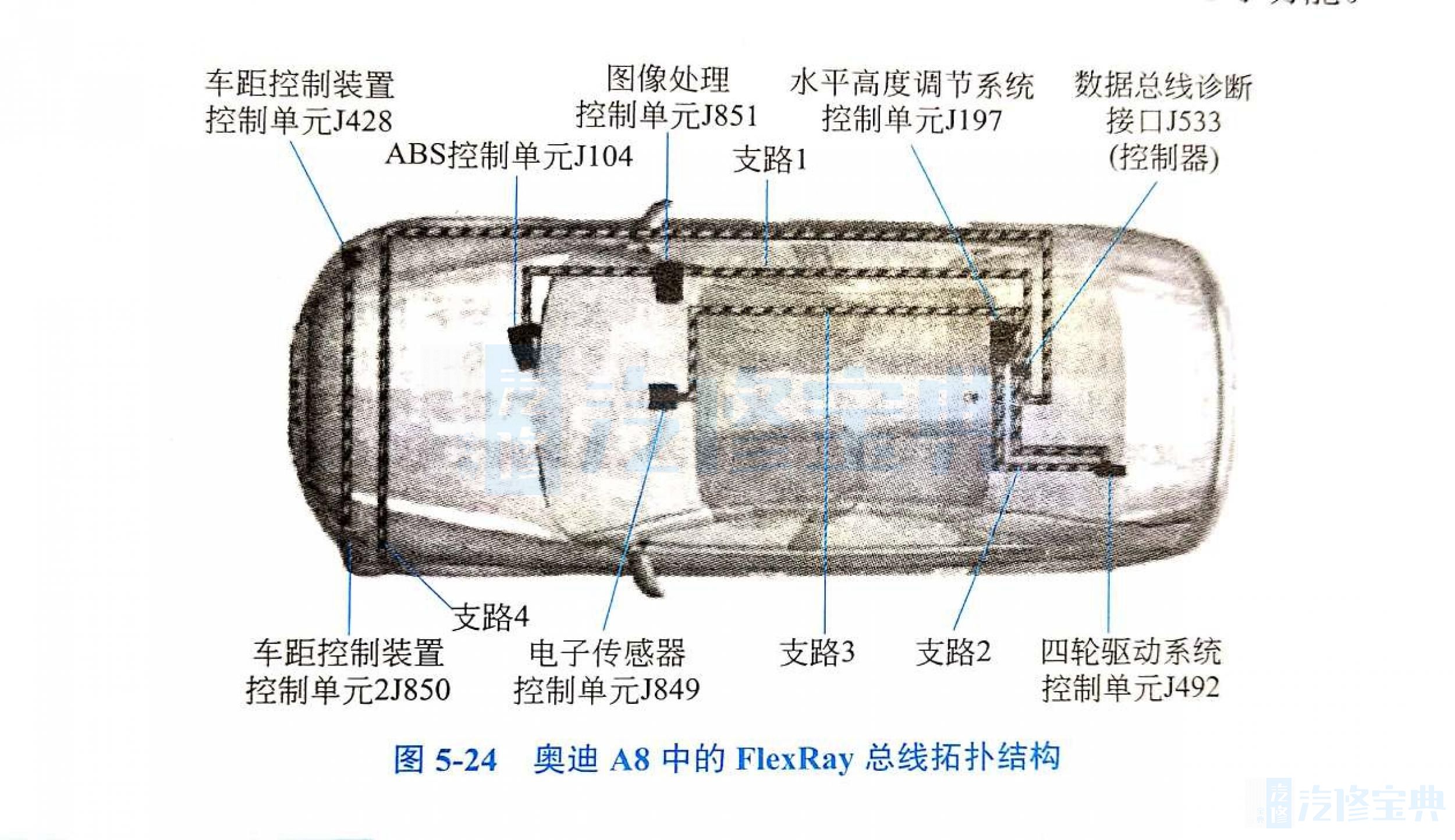
④用于高安全性要求的系统。 FlexRay本身不能确保系统安全,但它具备大量功能以支持面向安全的系统设计图5-24所示是奥迪A8中的 FlexRay总线拓扑结构。奥迪A8使用 FlexRay总线可以实现驾驶动态控制、车距控制、自适应巡航控制和图像处理等功能。