1.车轴传感器的作用。 车轴传感器可以很精确地检测车体的倾斜角度,照明距离自动调节(ALWR-Automatische Leucht weiten- regulierung)系统凭此信号可以自动校正汽车前照灯的照明距离在接入近光灯时,ALWR可以适应汽车的倾斜,以保证驾驶员有足够的视野,对迎面车辆没有盲区。静态的照明距离自动调节可以适应由于汽车负载引起的车身倾斜。动态的汽车照明距离自动调节可附加地适应由于制动、加速引起的汽车俯仰运动。
2.车轴传感器的结构和工作原理。
安装在车体前、后的车轴传感器(转角传感器)可检测汽车的倾斜,通过与车轴或车轮悬挂装置相连接的传动杆上的转动杆可以检测汽车的跳动。这样,前、后轴传感器间检测得的电压差可计算出汽车的俯仰情况。
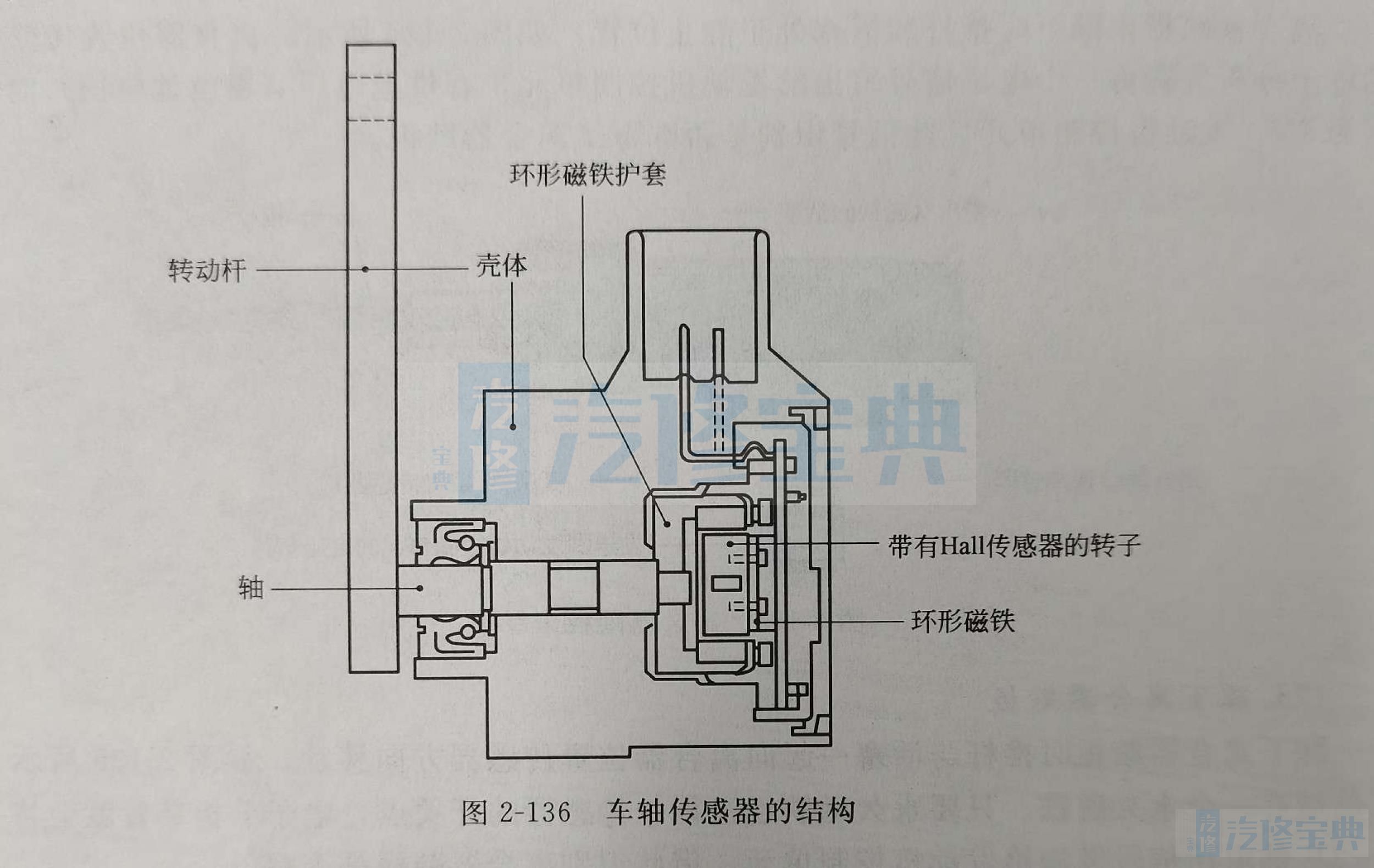
车轴传感器是利用Ha应原理制成。Hal传感器集成在转子上,转子处于均匀的磁场中。磁场在Hall传感器中产生Hal电压,如图2-136所示,该电压与磁通密度成正比当环形磁铁随轴转动时,通过Hall传感器的磁通密度发生变化。
汽车在受载和/或加速、制动引起的跳动传到轴传感器的转动杆上,并将它转换成与转角成比例的电信号。
ECU接收来自车轴传感器的电信号,并得到前、后轴间的电压差。在考虑了汽车行驶速度后可计算出伺服电机位置的设定值。当车辆等速行驶时动态照明距离自动调节保持在大阻尼状态,伺服电机的位置,即照明距离调节位置只是慢慢地与汽车俯仰状况相协调,以免遇到路面不平或凹坑冲击时不断校正照明距离。当车辆加速或制动时,照明距离自动调节马上进入动态工作方式,伺服电机位置在几毫秒内就与汽车俯仰相协调,然后又自动地回到大阻尼的慢速调节状态。