根据镜头和布置方式的不同,视觉传感器主要有四种:单目摄像头、双目摄像头、三目摄像头和环视摄像头。
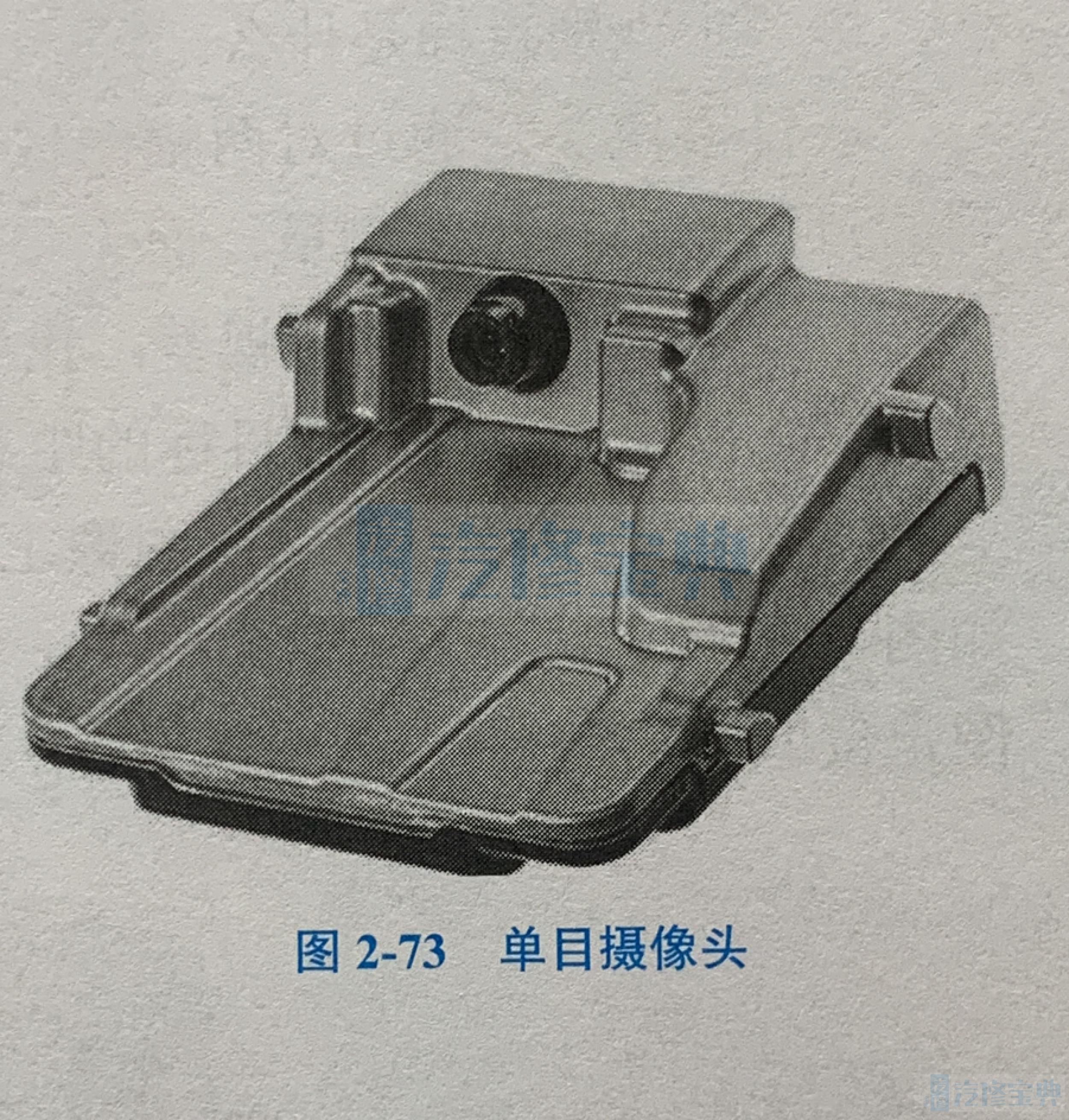
1.单目摄像头单目摄像头如图2-73所示,一般安装在前挡风玻璃上部,用于探测车辆前方环境识别道路、车辆、行人等。先通过图像匹配进行目标识别(各种车型、行人、物体等),再通过目标在图像中的大小去估算目标距离。
单目摄像头的算法思路是先识别后测距,首先通过图像匹配进行识别,然后根据图像大小和高度进一步估算本车到障碍物的移动时间。在识别和估算阶段,都需要和建立的图2-73单目摄像头样本库进行比较。想要识别各种车,就要建立车型数据库。
单目摄像头的优点是成本低廉,能够识别具体障碍物的种类,算法成熟度高,识别准确。
单目摄像头的缺点是它的视野完全取决于镜头,焦距短的镜头视野广,但缺失远处的信息;单目测距的精度较低;无法识别没有明显轮廓的障碍物;工作准确率与外部光线条件有关,并且受限于数据库,缺乏自学习功能。
视觉传感器的成像图是透视图,即越远的物体成像越小。近处的物体,需要用几百甚至上千个像素点描述;而处于远处的同一物体,可能只需要几个像素点即可描述出来。这种特性会导致越远的地方,一个像素点代表的距离越大,因此对单目摄像头来说,物体越远,测距的精度越低。
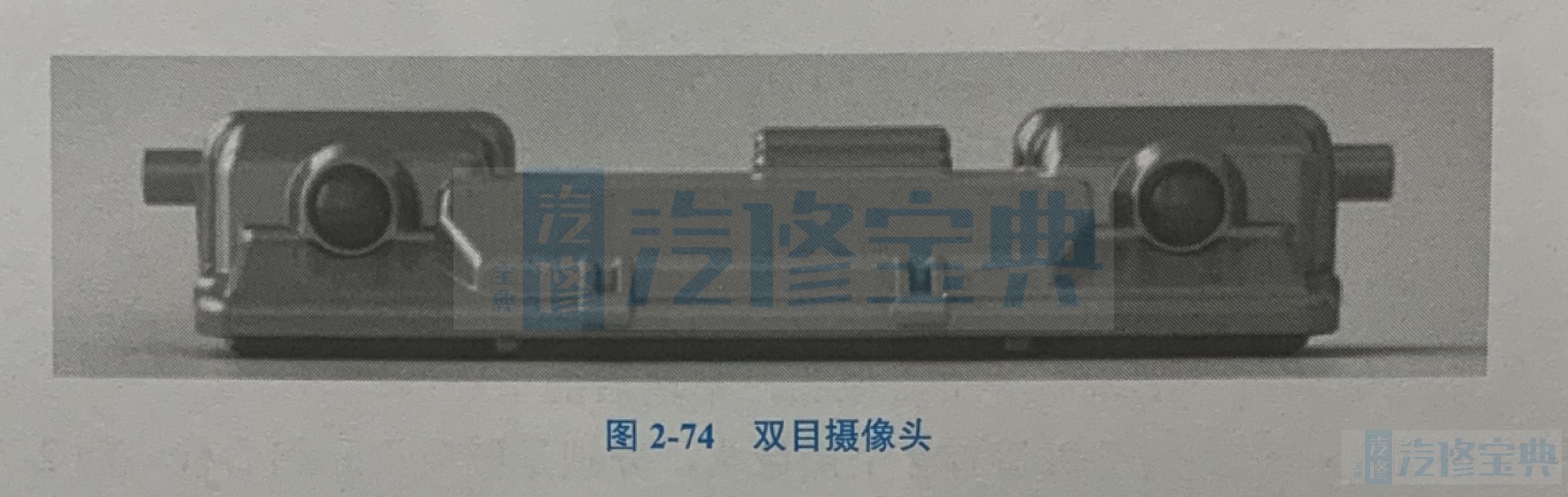
2.双目摄像图2-74所示是博世公司生产的双目摄像头,两个摄像头之间距离为12cm,像素数为1080×960,水平视场角为45°,垂直视场角为25°,最大探测距离为50m,不仅可以用于自动制动系统,也可以用于车道偏离预警系统和交通标志识别系统等。
双目摄像头的算法思路是先测距后识别。首先利用视差直接测量目标与本车
的距离,然后在识别阶段,双目仍然要利用单目一样的特征提取和深度学习等算法,进一步识别目标是什么。
双目摄像头是通过对两幅图像视差的计算,直接对前方目标(图像所能拍摄到的范围)进行距离测量,而无须判断前方出现的是什么类型的目标。依靠两个平行布置的摄像头产生的视差,找到同一个目标所有的点,依赖精确的三角测距,就能够算出摄像头与前方目标的距离,实现更高的识别精度和更远的探测范围。
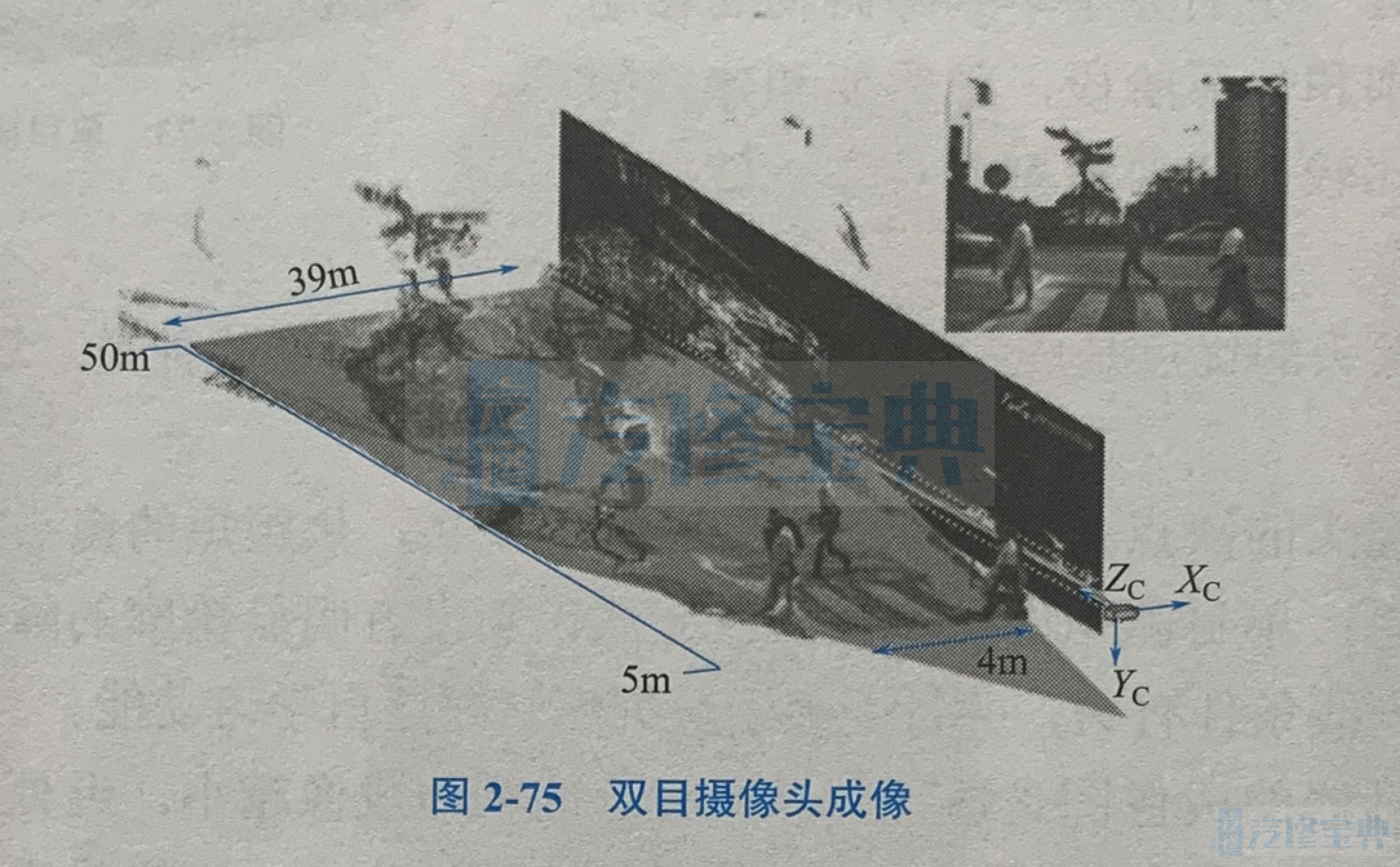
将双目测距原理应用在图像上每一个像素点时,即可得到图像的深度信息,如图2-75所示。深度信息的加入,不仅能便于障碍物的分类,更能提高高精度地图定位匹配的精度。
双目摄像头需要两个摄像头有较高的同步率和采样率,因此技术难点在于双目标定及双目定位。相比单目摄像头,双目摄像头没有识别率的限制,无须先识别,可直接进行测量;直接利用视差计算距离精度更高;无须维护样本数据库。
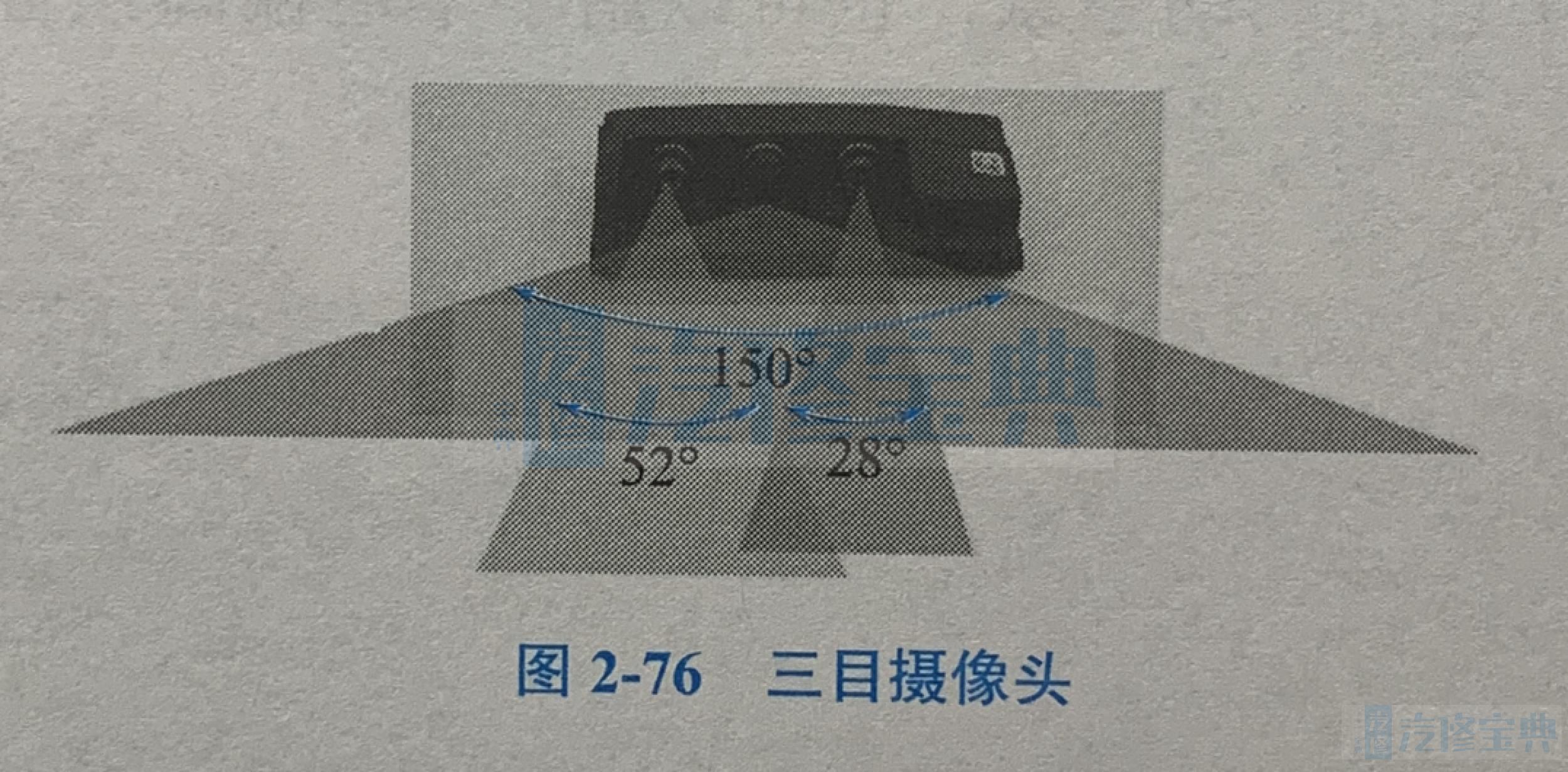
3.目摄像头三目摄像头如图2-76所示,它实质上是三个不同焦距单目摄像头的组合。三目摄像头感知范围更大,但需要同时标定三个摄像头,工作量大。
特斯拉电动汽车配备了8个摄像头,车辆后面1个倒车摄像头,车辆前面1个三目摄像头,车辆两侧每边有2个摄像头,分别是侧前视和侧后视。图2-77所示为特斯拉电动汽车安装在挡风玻璃下方的三目摄像头,增加深度学习功能,可
识别障碍物位置、可行空间、车辆形状、行人、交通标志、交通信号灯等,车辆周围的感知能力提升了6倍
三目摄像头的感知范围由远及近,分别为前视窄视野摄像头,最远感知250m;前视主视野摄像头,最远感知150m;前视宽视野摄像头,最远感知6m。
由于三目摄像头每个相机的视野不同,因此近处的测距交给宽视野摄像头,中距离的测距交给主视野摄像头,更远的测距交给窄视野摄像头。这样一来每个摄像头都能发挥其最大优势。
三目摄像头的缺点是需要同时标定三个摄像头,因而工作量更大一些。其次,软件部分需要关联三个摄像头的数据,对算法要求也很高。
4.环视摄像头环视摄像头一般至少包括4个鱼眼摄像头,而且安装位置是朝向地面的,能够实现360°环境感知。
环视摄像头的感知范围并不大,主要用于车身5~10m内的障碍物检测、自主泊车时的车位线识别等。鱼眼摄像头为了获取足够大的视野,代价是图像的畸变严重。
摄像头有红外摄像头和普通摄像头,红外摄像头既适合白天工作,也适合黑夜工作;普通摄像头只适合白天工作,不适合黑夜工作。目前车辆使用的主要是红外摄像头。