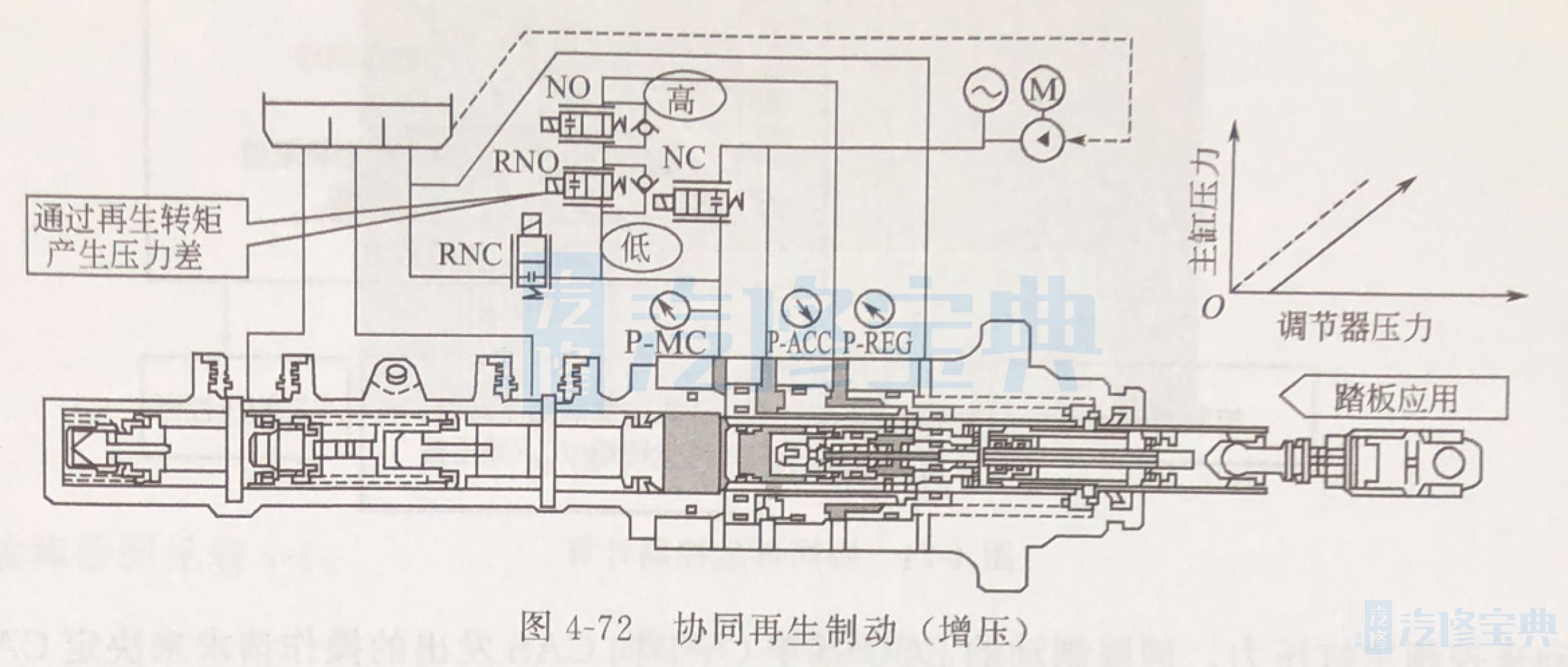
(1)协同再生制动(增压) 带IMA的协同控制是指RNO电磁阀调节压力差,使其等同于再生转矩,根据调节压力差延迟主缸压力增加,如图4-72所示。
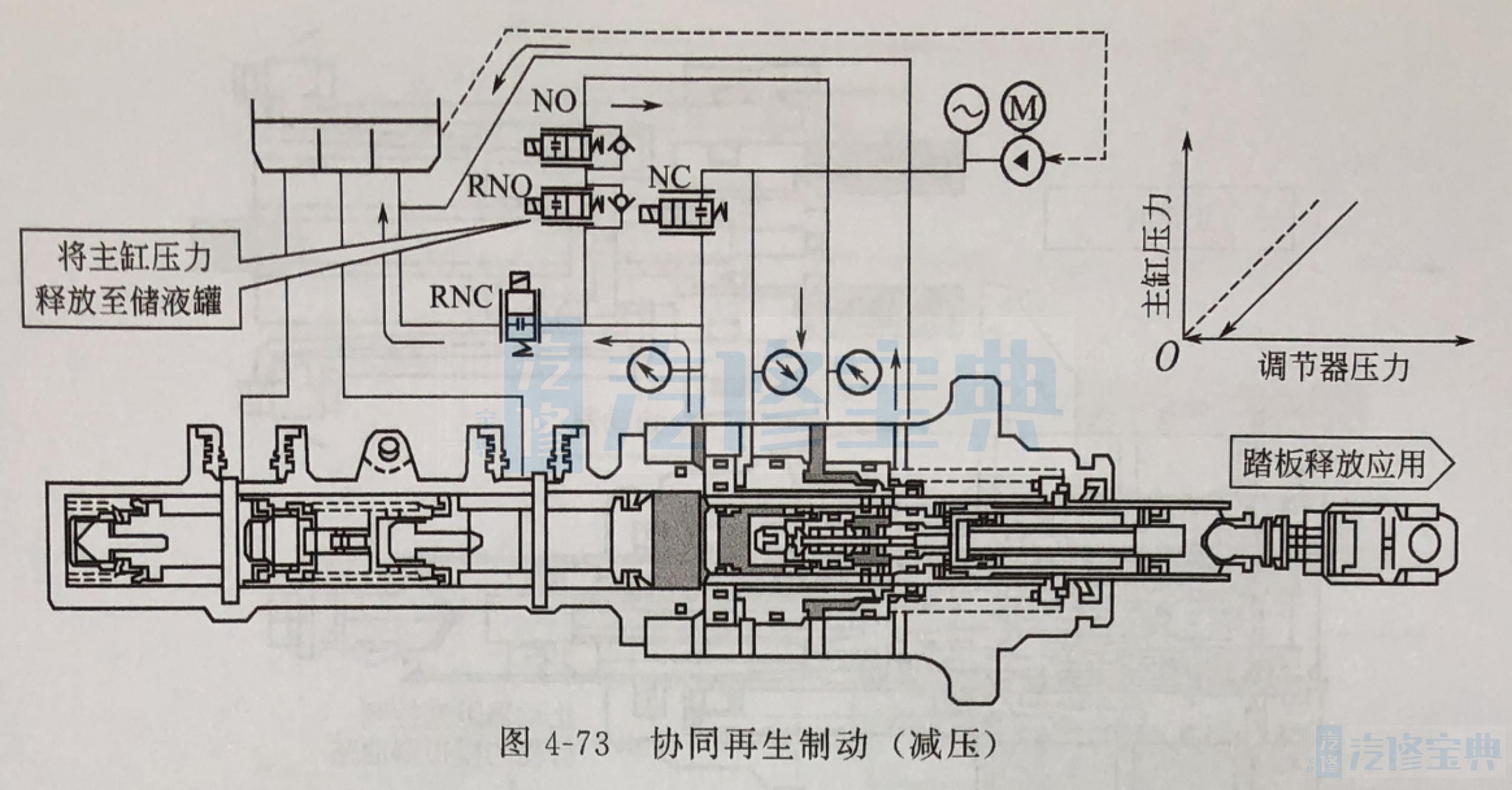
(2)协同再生制动(减压) 带IMA的协同控制是指RNO电磁阀将主缸压力释放至储液罐,根据调节压力加速主缸压力下降,如图4-73所示。
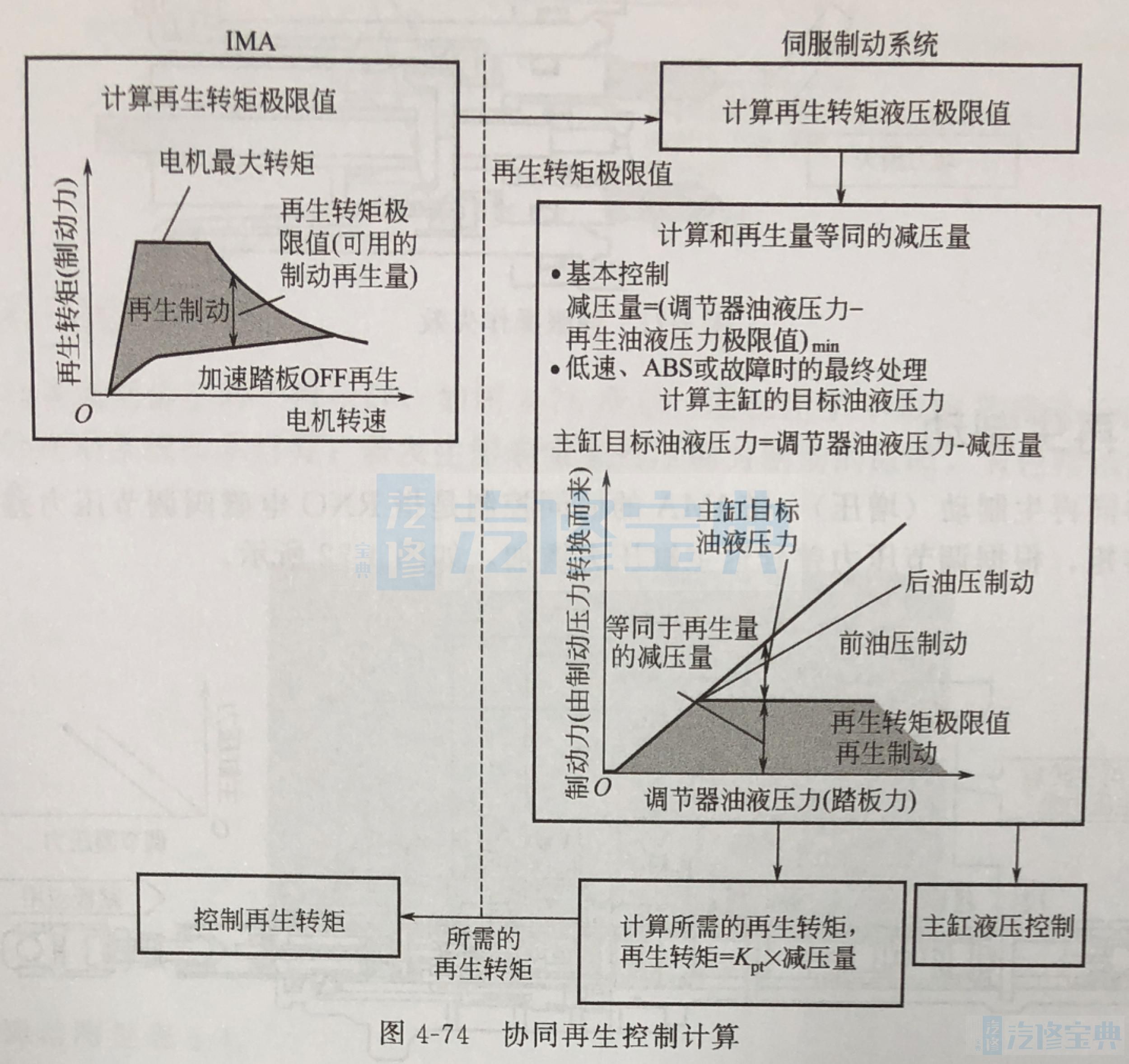
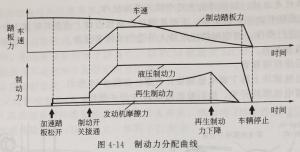
IMA根据电机转速与再生制动转矩(制动力)计算出电机的最大转矩,用于加速踏板松开时的再生制动,并将再生转矩极限值发送至伺服制动系统的ECU,计算出等同于再生量的主缸减压量及目标油液压力。伺服制动系统的ECU控制主缸的油液压力,计算需要的再生转矩并发送到IMA端,如图4-74所示。
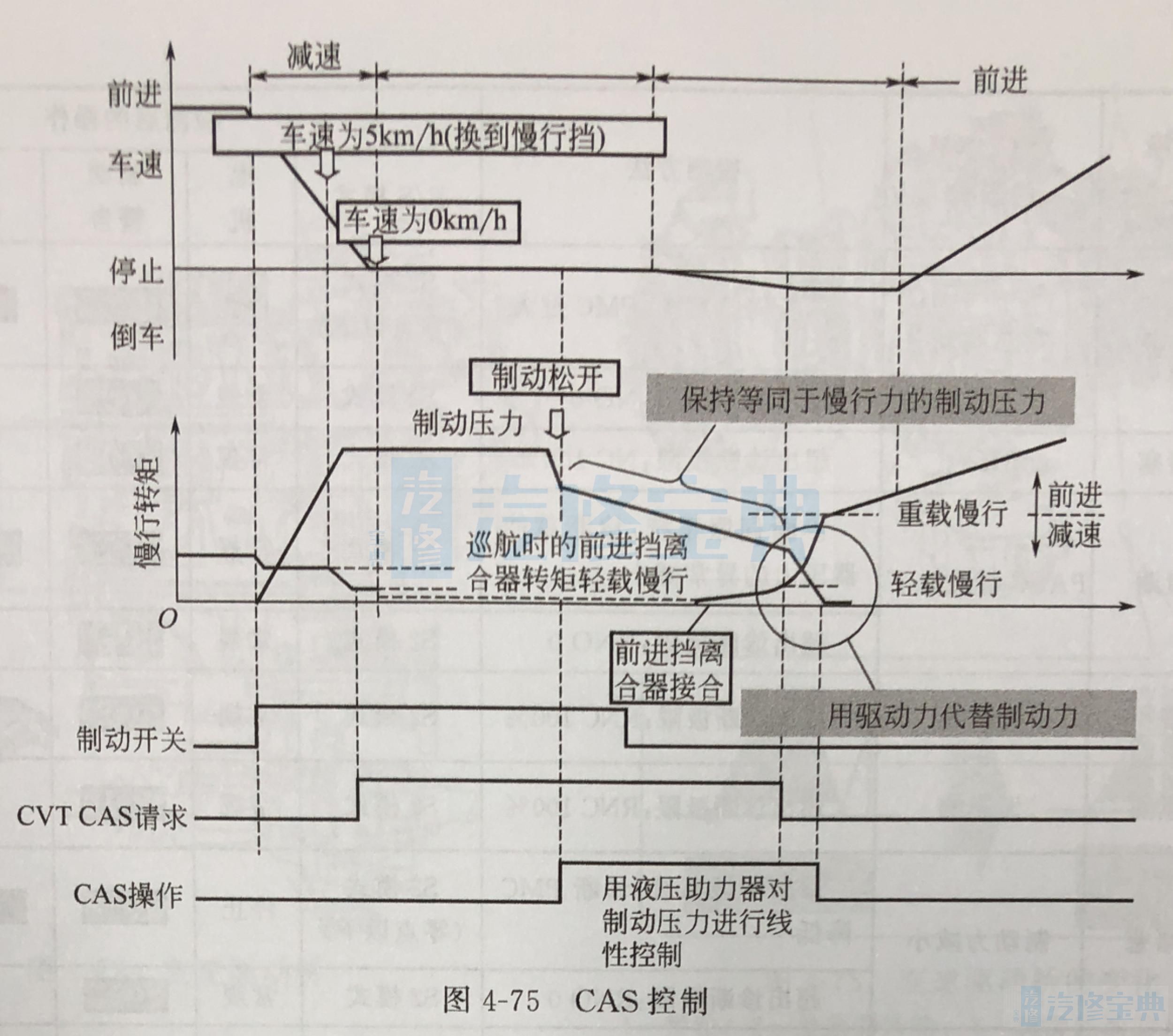
(3)CAS控制 慢行辅助系统(CAS)控制是指伺服制动的ECU通过NO电磁阀的线性驱动来控制主缸压力。伺服制动的ECU基于CVT向CAS发出的操作请求来决定CAS的工作类型,并且保持或释放制动压力。
车辆上坡施加制动时,制动开关打开。在车辆减速直至停止前,CVT向CAS发出请求,使车辆轻载慢行。
当松开制动踏板重新启动时,制动液压力开始降低,但保持了等同于慢行的制动压力。
当踩下加速踏板产生驱动力时,它改变了制动力,使车辆前行。
CAS控制如图4-75所示。