在泊入过程中,自动泊车辅助系统(PLA3.0系统)将接管转向系统的功能,驾驶员仍需负责加速踏板、制动踏板和离合器的操作,系统现在还可以实现向前泊入橫向车位。自动识别合适的泊车方案。前后各四个泊车辅助系统传感器的有效范围为2m;前后各两个自动泊车辅助系统传感器的有效范围为4m。通过仪表板按键激活自动泊车系统。 受限条件如下。
①在某些情况下,超声波传感器可能识别不到诸如挂车牵引杆、细杆、篱笆、隔离柱、树木和已打开的或正在打开的行李厢盖等,因此可能导致汽车损坏。
②在汽车上额外装上加装件,例如自行车架,可能影响自动泊车系统功能并造成损坏。
③自动泊车系统以已停驻的汽车路沿或其他情况为导向。应确保轮胎和轮辋在泊车时不会受损。必要时要及时取消泊车过程,以免损坏汽车。
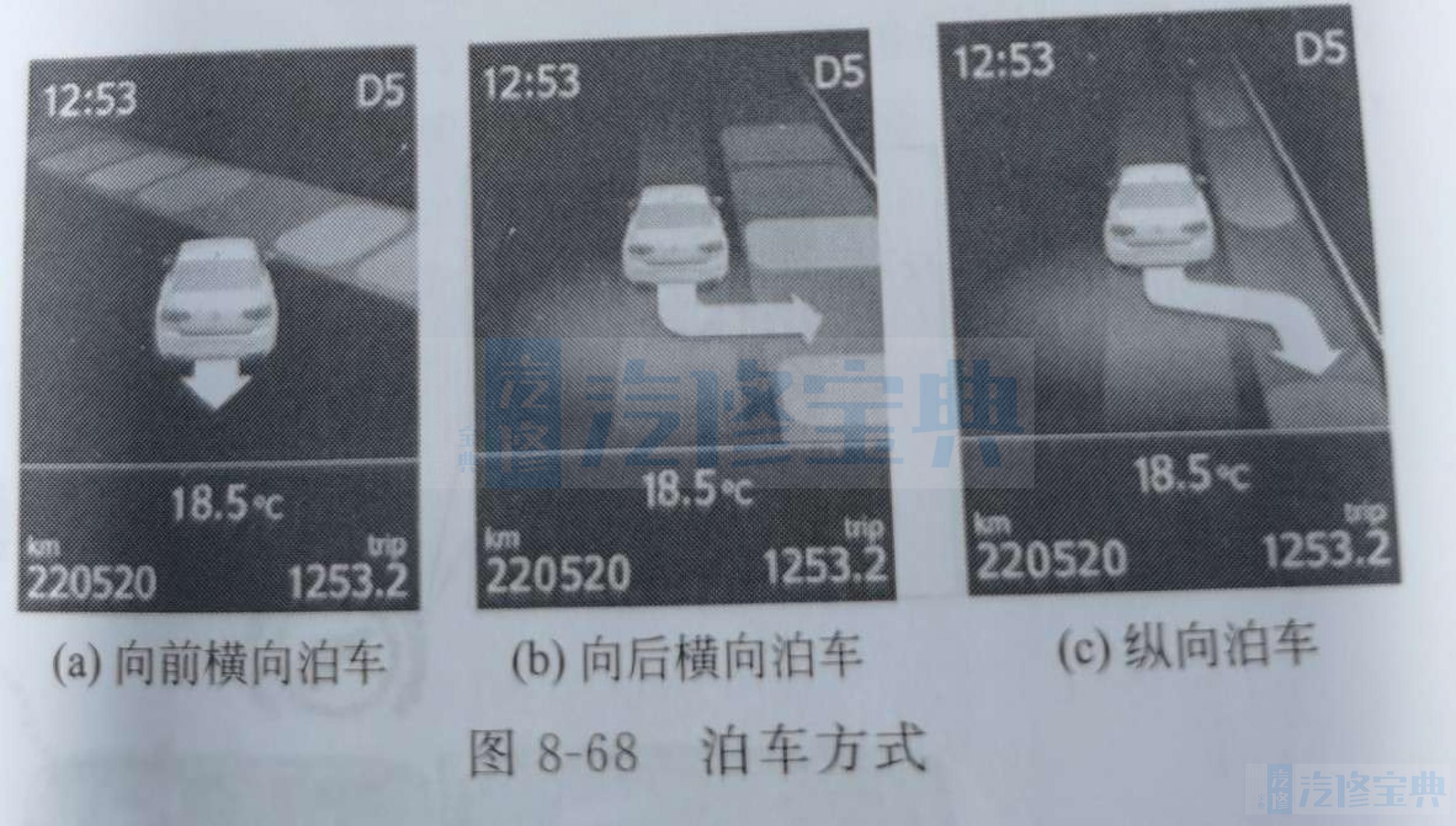
系统共有三种泊车方式,如图所示。
在提供转向支持之前,必须对合适的停车位进行测量并了解与这个停车位的相对车辆位置。经优化的超声波传感器可以更精确地识别并选择停车位。
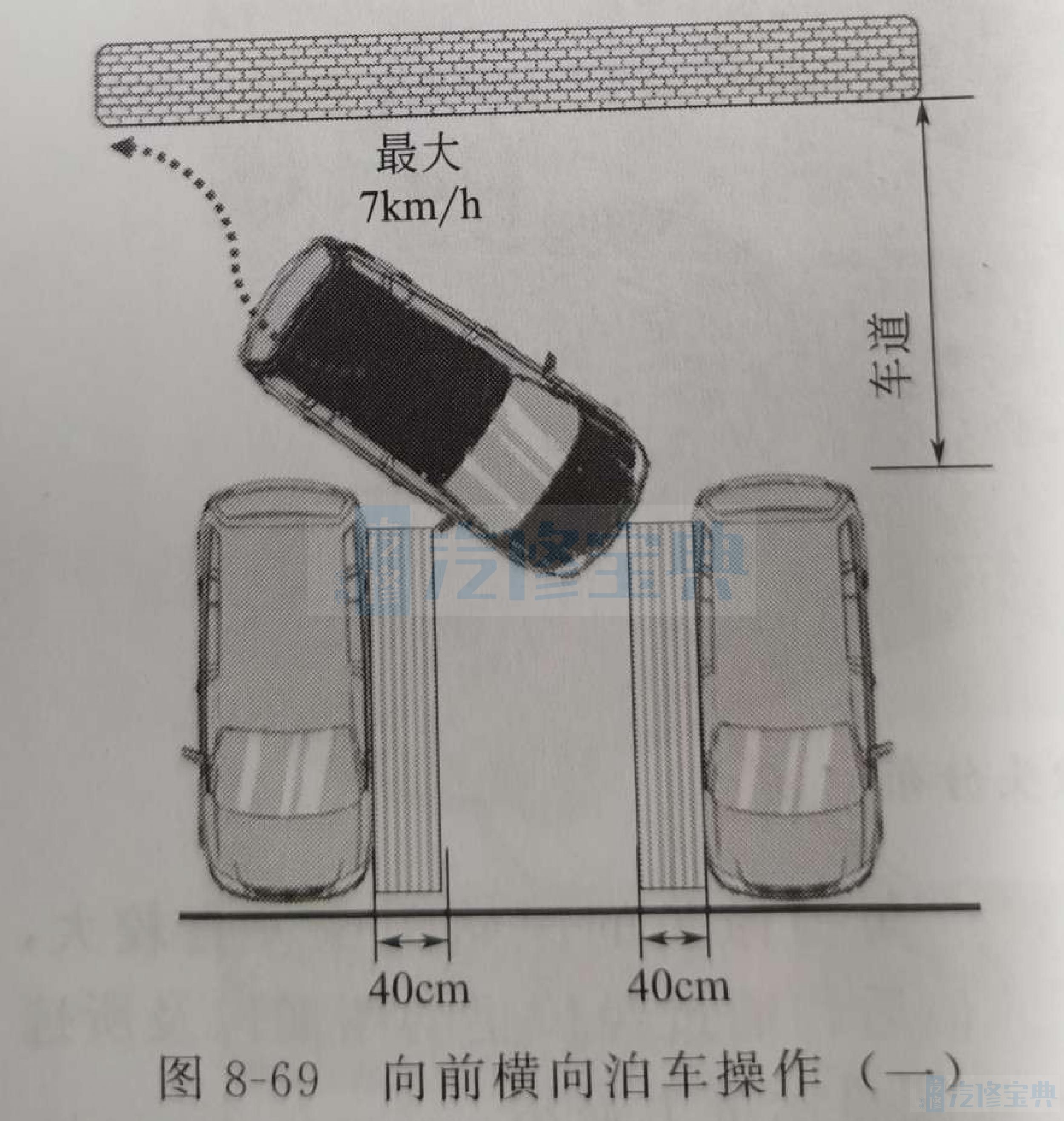
向前进行横向泊车,事先不调整车位,通过车头部分进入停车位(卡住)的方式识别停车位:最小停车宽度为自己车辆宽度加80cm,车道宽度最小为车辆宽度加1m,速度最大为7km/h,前进停车最多可用10步。此种停车方式如图所示。
向前进行横向泊车,事先调整车位,通过驶过的方式识别停车位:最小停车宽度为自己车辆宽度加80cm,调整车位时的速度最大为20km/h,进行泊车时的速度最大为7km/h此种停车方式如图所示。
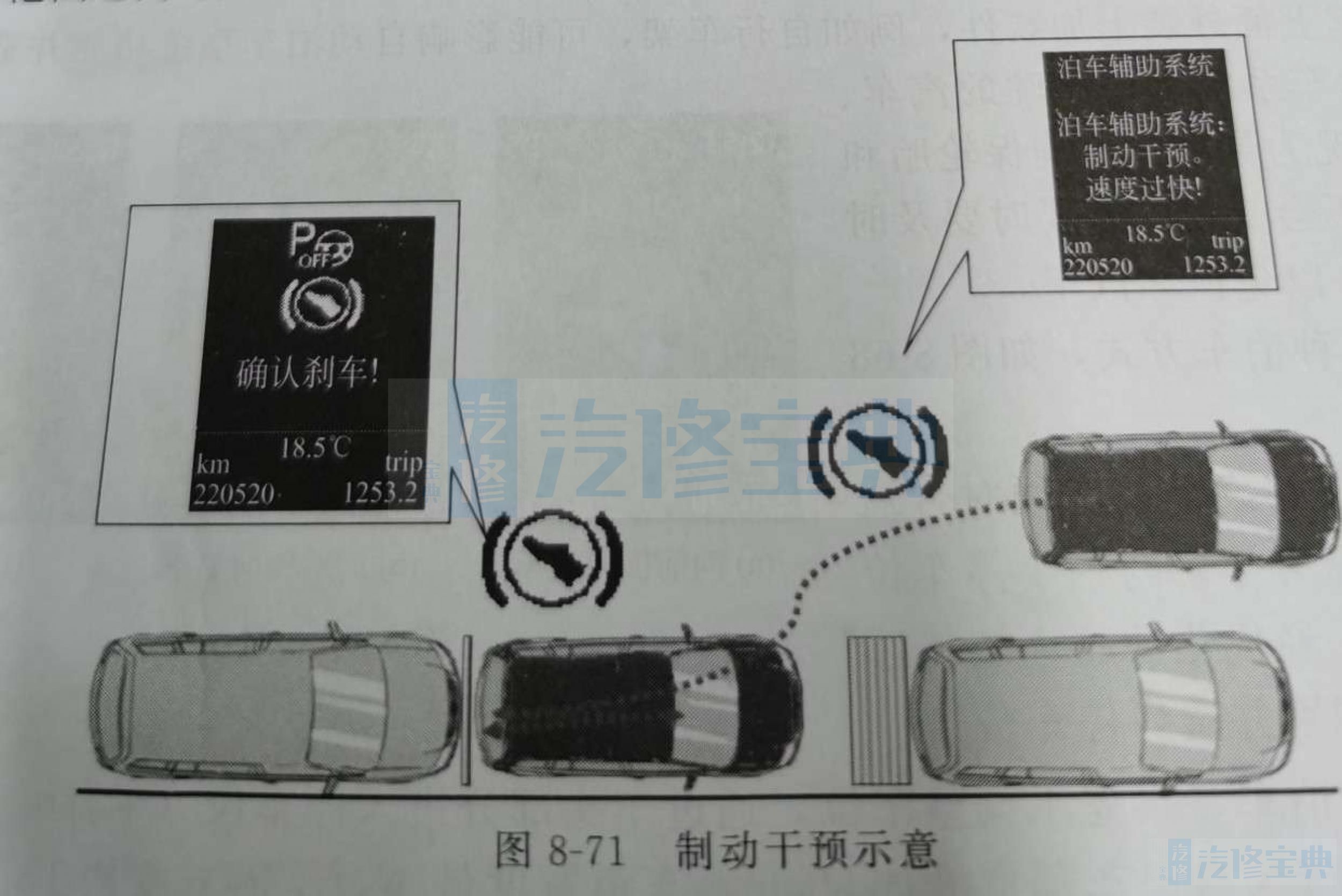
当在激活转向干预的情况下,在超过允许的泊车速度7km/h时发出制动晃动警告(如果第二次超过限制则会中断泊车)。如果识别到与障碍物的碰撞危险,系统进行紧急制动直至车辆静止(在进行制动干预之后结束泊车辅助系统),功能示意如图所示。
全景影像系统( Area view)是一种基于摄像头的环境探测系统,驾驶员通过它可以观察车辆四周的情况。它为驾驶员提供多种视图和设置模式,以便驾驶员根据交通状况和信息需求进行有针对性的选择。
开启方式:通过仪表板中部按键;挂入倒挡通过四个摄像头实现对车辆全景的监控,如图所示。
通过每个摄像头的190°开启角度,全景影像系统可以探测车辆周围的整个区域,还可以观察“死角”,并在MIB系统操作和显示单元的显示屏上显示这些内容。因为摄像头的视野范围是相交的,因此在相邻摄像头的视野范围之间可产生准确且真实的视觉过渡。当车速为0~15km/h时,全景影像系统开始运行。广角摄像头的原始图像失真较大,因此全景摄像头系统控制单元对接收到的图像进行校正。最后,通过经校正的图像以及所选视图,为距离显示和车道预测加载辅助线,然后在MIB系统显示屏上显示。
根据所选视图,显示静态和动态辅助线,可以帮助驾驶员更好地评估车距并描绘与转向角度有关的车道。