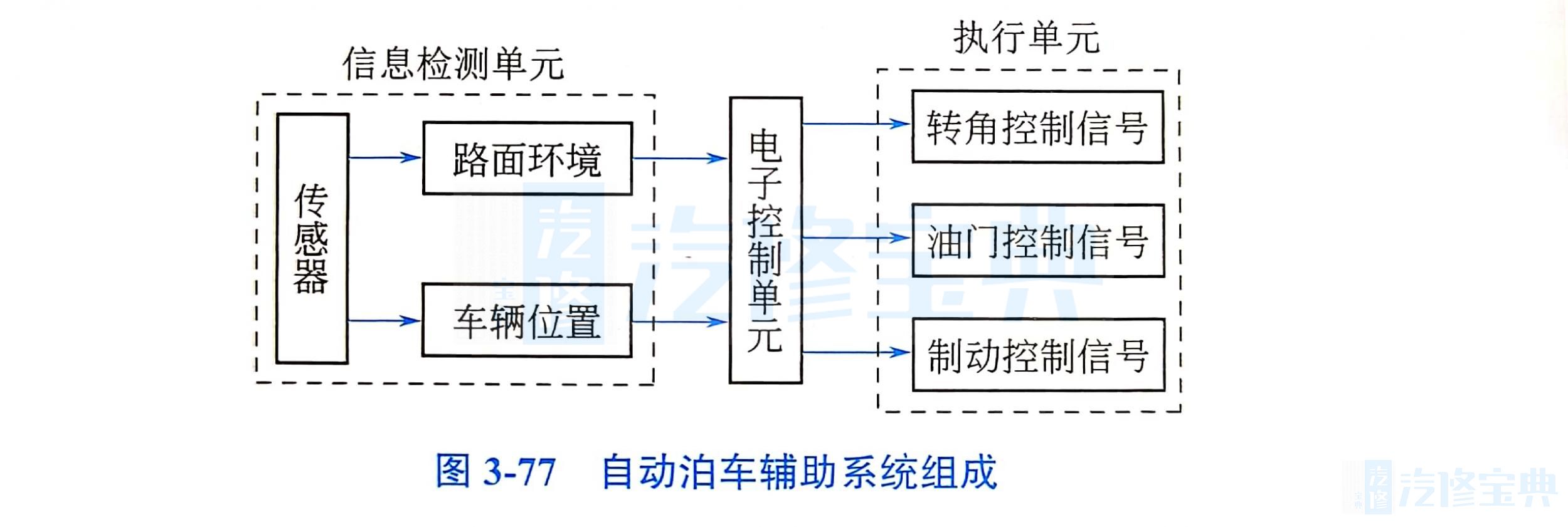
自动泊车辅助系统主要由信息检测单元、电子控制单元和执行单元等组成如图3-77所示。
信息检测单元是自动泊车系统的“耳目”,利用摄像头或雷达传感器等对路面环境和车辆位置等进行检测,可采集图像数据及周围物体距车身的距离数据,并
通过数据线传输给电子控制单元;电子控制单元是自动泊车辅助系统的核心,将信息检测单元上传的数据进行分析处理后,得出汽车的当前位置、目标位置以及周围的环境参数,依据这些参数做出自动泊车策略,并将其转换成电信号:执行单元接收电子控制单元的指令,精确控制转向盘的转动、油门和刹车的运动,以使汽车能准确跟踪路径,并随时准备接收中断以紧急停车。自动泊车的过程通常为汽车进入停车区域后缓慢行驶,人工开启自动泊车辅助系统,或者根据车速自动启动自动泊车辅助系统,通过车载传感器扫描汽车周围环境,通过对环境区域的分析和建模,搜索有效泊车位,当确定目标车位后,系统提示驾驶员停车并自动启动自动泊车程序,根据所获取的车位大小、位置信息,由程序计算泊车路径然后自动操纵汽车泊车入位。
从机理上分析,自动泊车辅助系统的运行过程主要分为以下三个部分。
(1)车位检测通过车载传感器获取环境信息,传感器主要采用测距传感器(如雷达)和视觉传感器(如摄像头),然后识别出目标车位。
(2)路径规划根据所获取的环境信息,电子控制单元对汽车和环境建模,计算出一条能使汽车安全泊入车位的路径。
(3)路径跟踪控制汽车跟踪预先规划的泊车路径,使汽车避障泊车入位。