为了使汽车在不同的光线和路况下安全行驶,汽车AFS能够改变前照灯照射方向,使光线随着汽车前进方向和车身姿态的变化而转动,消除驾驶员在夜间或恶劣天气下行车的视野盲区。与传统的汽车照明模式比较,AFS能够根据道路和天气环境的变化适时地开启相应的照明模式,图7-33所示为不同工作模式下的照射光形。
汽车AFS照明模式主要有基础照明模式、弯道照明模式、城市道路照明模式高速公路照明模式、乡村道路照明模式和恶劣天气照明模式等。
1.基础照明模车辆在行驶过程中,当道路状况及环境气候均处于正常状况时,前照明系统的工作模式相当于传统的汽车照明系统,其照明模式为基础照明模式。在基础照
明模式下,前照明系统不做任何调整。
当环境光强传感器检测到外界光线变化时,系统就会执行相应的动作。例如天黑或者汽车进入隧道后,环境光强传感器检测到外界光线下降,系统自动开启前照灯并且根据感知的光线强度来补充光照强度以满足驾驶要求;当传感器检测到外界光线强度能够达到照明要求,例如白天或者汽车出隧道后,系统就自动关闭汽车前照灯。有时候,车辆停止后,驾驶员下车后仍然需要灯光照明来观察停车情况,所以,系统可以设置灯光延时功能。
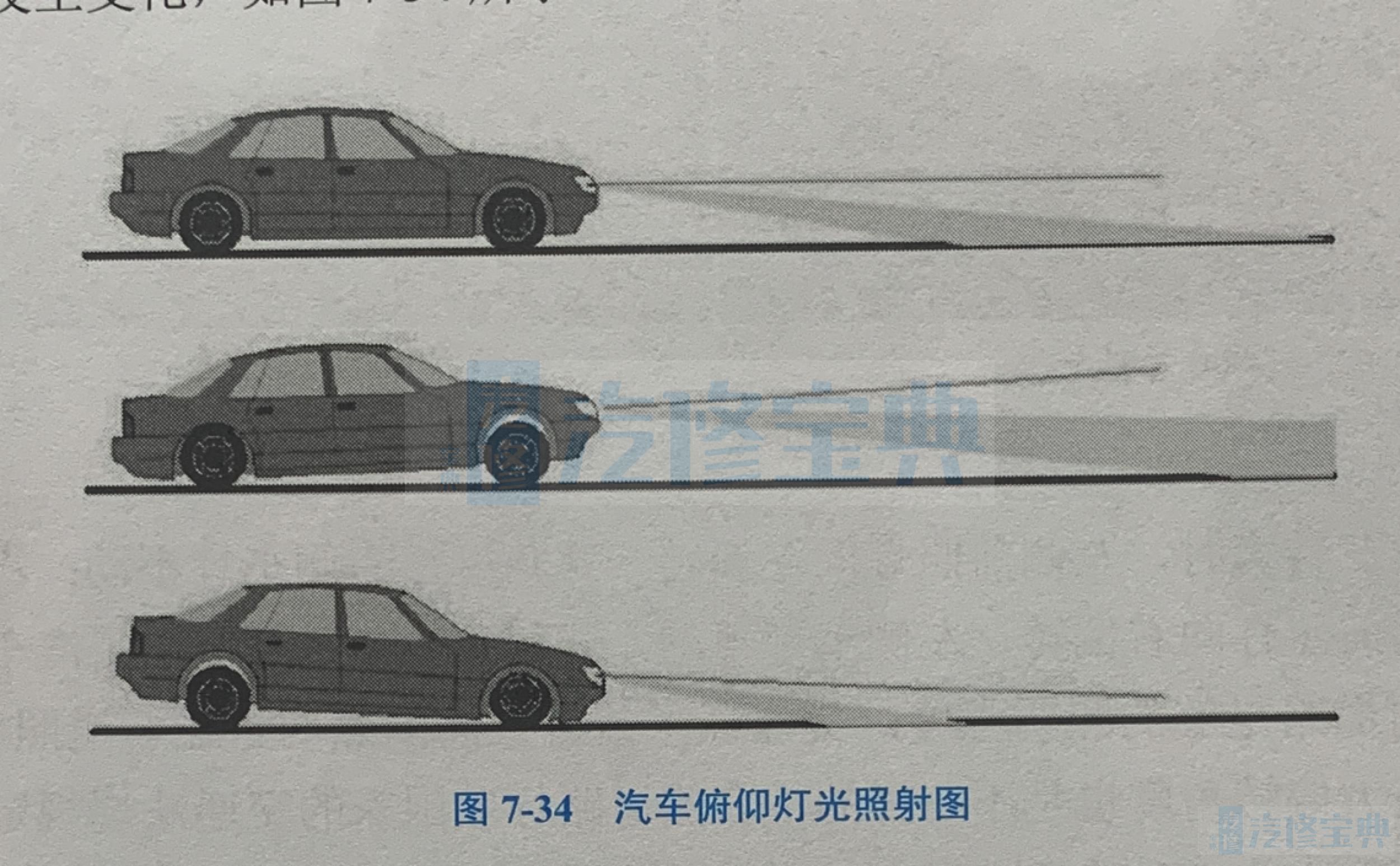
汽车经常会行驶在坡路上,有时即使是在平坦的道路上,由于汽车载重或者突然的加速或刹车,都会导致车身发生俯仰,车身的俯仰就一定会造成前照灯照射的角度发生变化,如图7-34所示。
汽车正常行驶过程中,前照灯光轴在水平位置。当车身发生后仰时,前照灯的照射光线就会抬高,光线抬高造成远处的照射光线发散,造成驾驶员视野模糊,不能清晰地辨认远处的行人和物体,一旦发生紧急情况,就没有足够的时间来保证行车安全。当车身发生前仰时,前照灯的照射光线降低,从而导致照明范围缩小,驾驶员不能及时地发现前方路况,严重影响了行车安全。在这种行车条件下车身高度传感器能够检测到汽车前后高度的变化,结合车速传感器采集到的车速信息,系统根据汽车前后高度的变化量以及轴距计算出车身俯仰角的差值,从而调整汽车前照灯纵向角度,使前照灯光轴恢复到水平位置以提供最佳的照明条件,确保驾驶员在该情况下有足够视野来判断前方的路况,保证行车安全。
2.弯道照明模式汽车在夜间转弯行驶时,传统汽车前照灯的照射光线与车身前进方向平行,所以在车身的两侧就会出现暗区,驾驶员无法及时地发现弯道上的路况,容易导致交通事故的发生。在这种情况下,AFS可以开启弯道照明模式。当汽车进入弯道时,转向盘转角传感器和车速传感器共同作用采集数据。例如当转向角大于12°
并且车速大于30km/h时,系统开始工作;当转向角小于9°或车速小于5km/h时,系统不工作或停止工作。在弯道模式下,控制单元根据传感器采集的数据计算出车灯需要偏转的角度,驱动步进电机转动以使大灯转动。
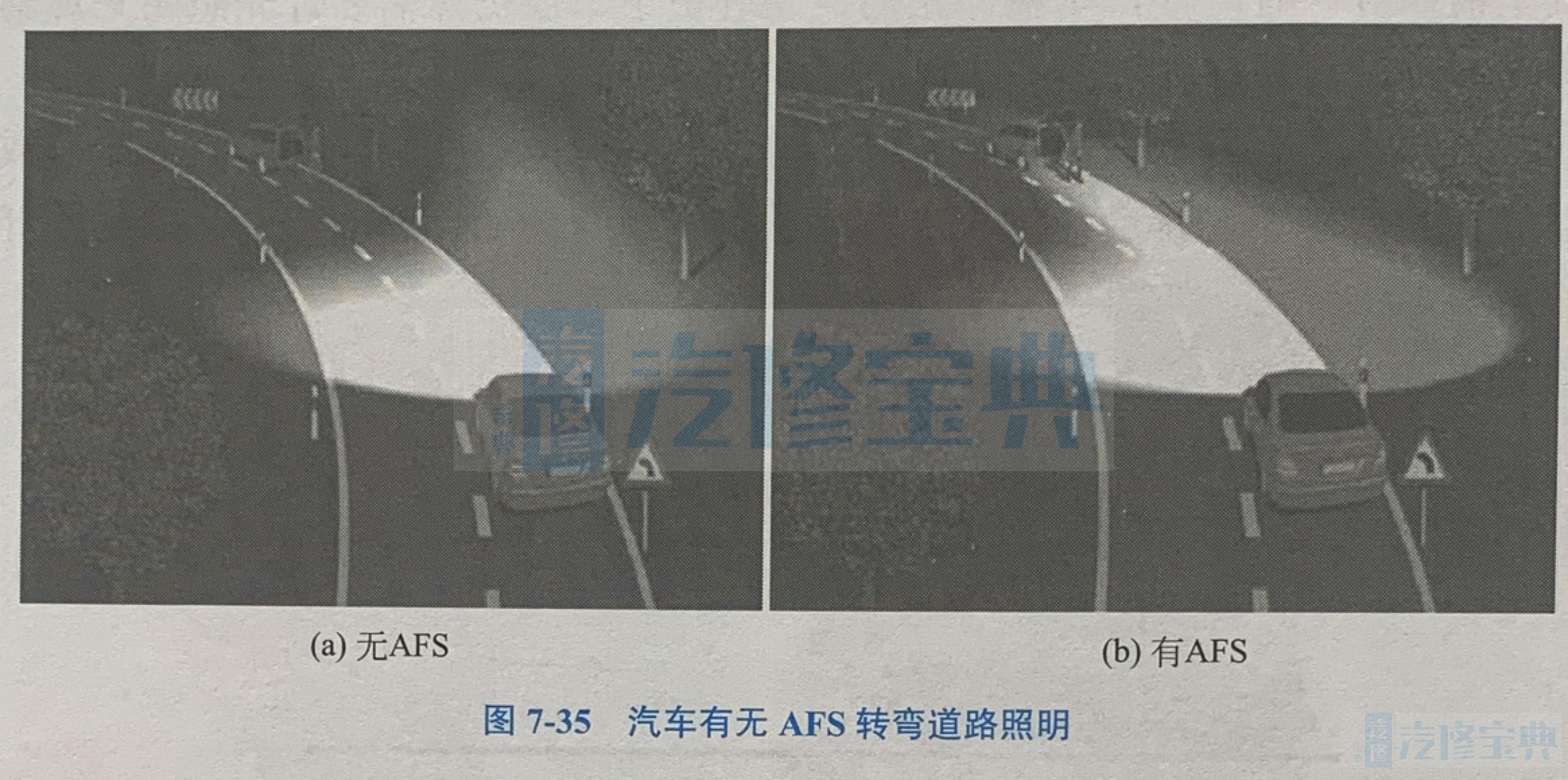
AFS能够使车辆在进入弯道时产生旋转的光型,给弯道以足够的照明,如图7-35所示。
汽车向左转弯时,左侧前照灯向左偏转一定角度,右侧车灯不动;汽车向右转弯时,右侧前照灯向右偏转,左侧车灯不动。这种照明模式既提供了汽车在弯道上行驶时侧面道路足够的照明强度,又保证了前进方向的照明。在弯道照明模式下,左右车灯最大偏转角度也是不一样的,右侧道路行驶国家的交通法规规定右侧近光灯变化角度最大为5°,左侧近光灯变化角度最大为15°。为保证弯道照明模式下的行车安全,车灯偏转角度依据的原则是尽可能地保证照明距离大于安全刹车距离。
3.城市道路照明模式城市道路行车的特点是车速较低,车流量和人流量都很大,外界照明条件好十字路口多,发生随机性事故的可能性较大。在这样的道路上行车要求视野清晰,防止眩光。
资料表明,对向行车时,驾驶员接收到的照射光强如果达到1000cd就会产生眩晕。当环境光强传感器检测到光强达到阈值、车速小于60km/h时,车辆进入城市照明模式,系统使左右近光灯的功率减小,降低灯光亮度,同时驱动控制车灯的电机转动,使前照灯略向下偏转,进一步降低射向车和行人的光照强度,防止眩光现象的发生。
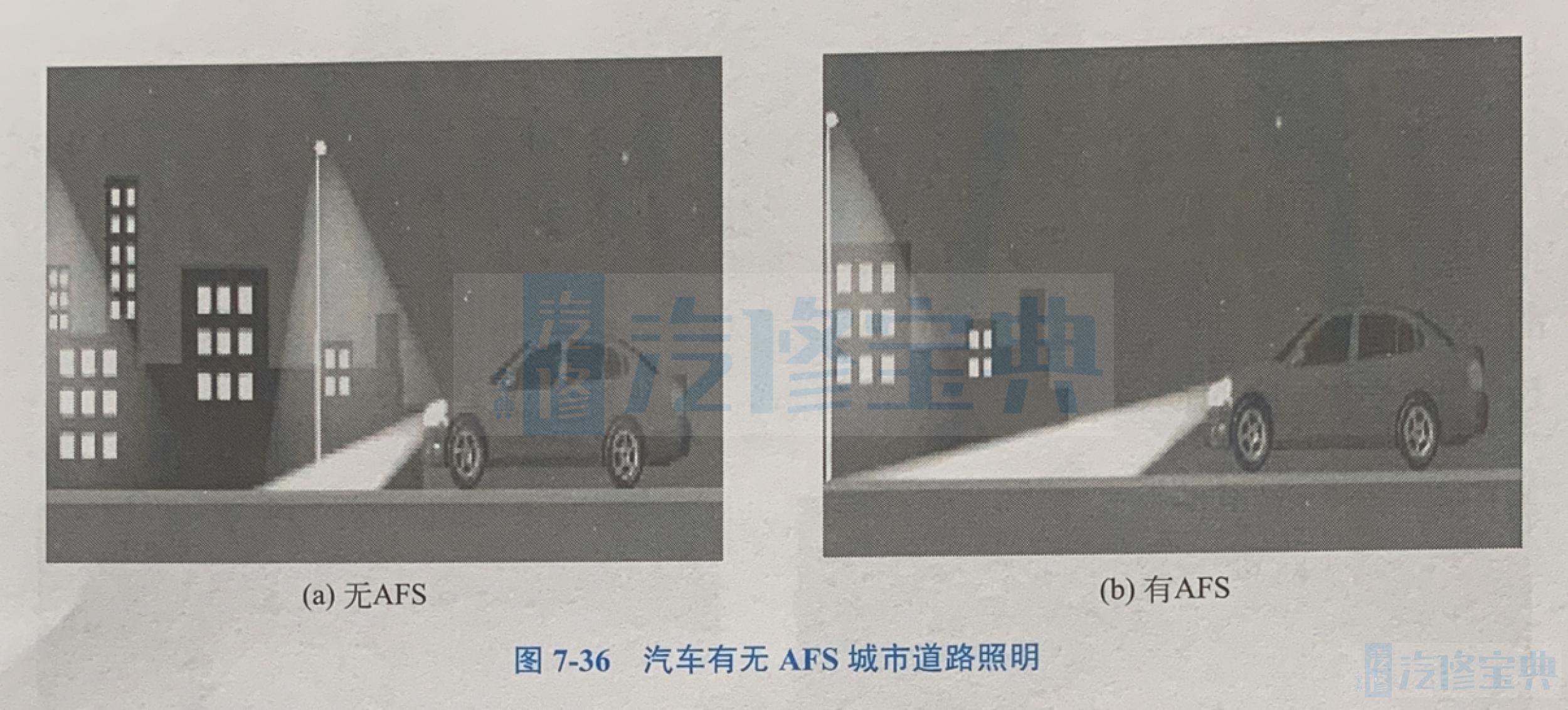
在市区车辆行驶速度较为缓慢的前提下,AFS使用比较宽阔的光型,以便在道路边缘和交叉路口都能获得较好的照明,有效地避免了与岔路中突然出现的行人、车辆可能发生的交通事故,如图7-36所示。
4.高速公路照明模式高速公路上行车特点是车速快,车流量相对较小,侧向干扰少。这样的行车特点要求前照灯光线照射距离足够远,以保证前方出现状况时驾驶员有足够的时间采取措施。在高速公路上行车,汽车灯光的照射距离应该与车速成正比的关系,汽车灯光的照射距离要大于驾驶员的反应距离和刹车距离的总和。
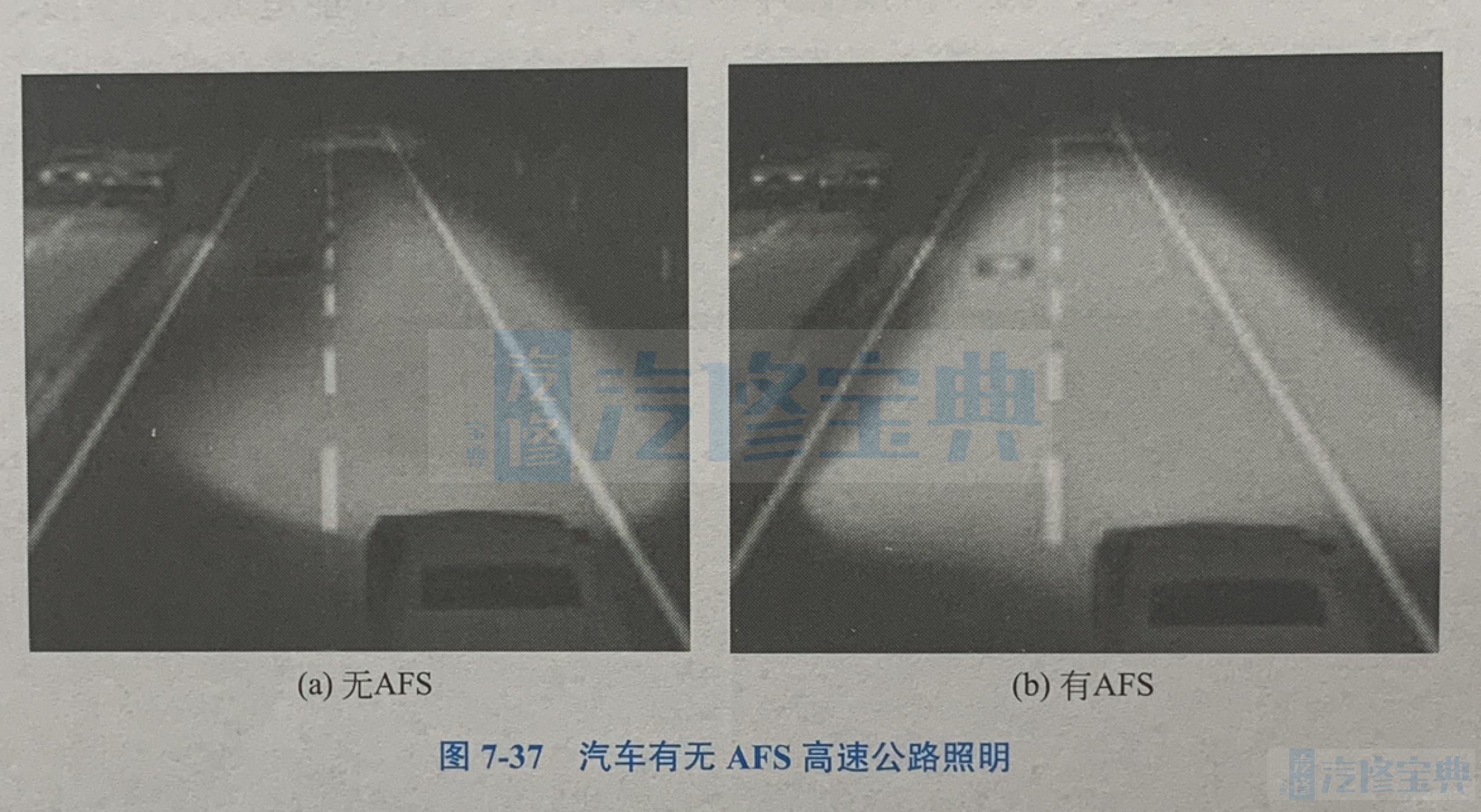
汽车行驶在高速公路时,当车速传感器检测到车速大于70km/h,并根据GPS判断其为高速行驶模式时,系统自动开启高速公路照明模式。汽车前照灯照射光线随着车速的增加在垂直方向上抬高,以使光线能够照射得更远,保证驾驶员能够在安全距离之外发现前方的车辆,如图7-37所示。
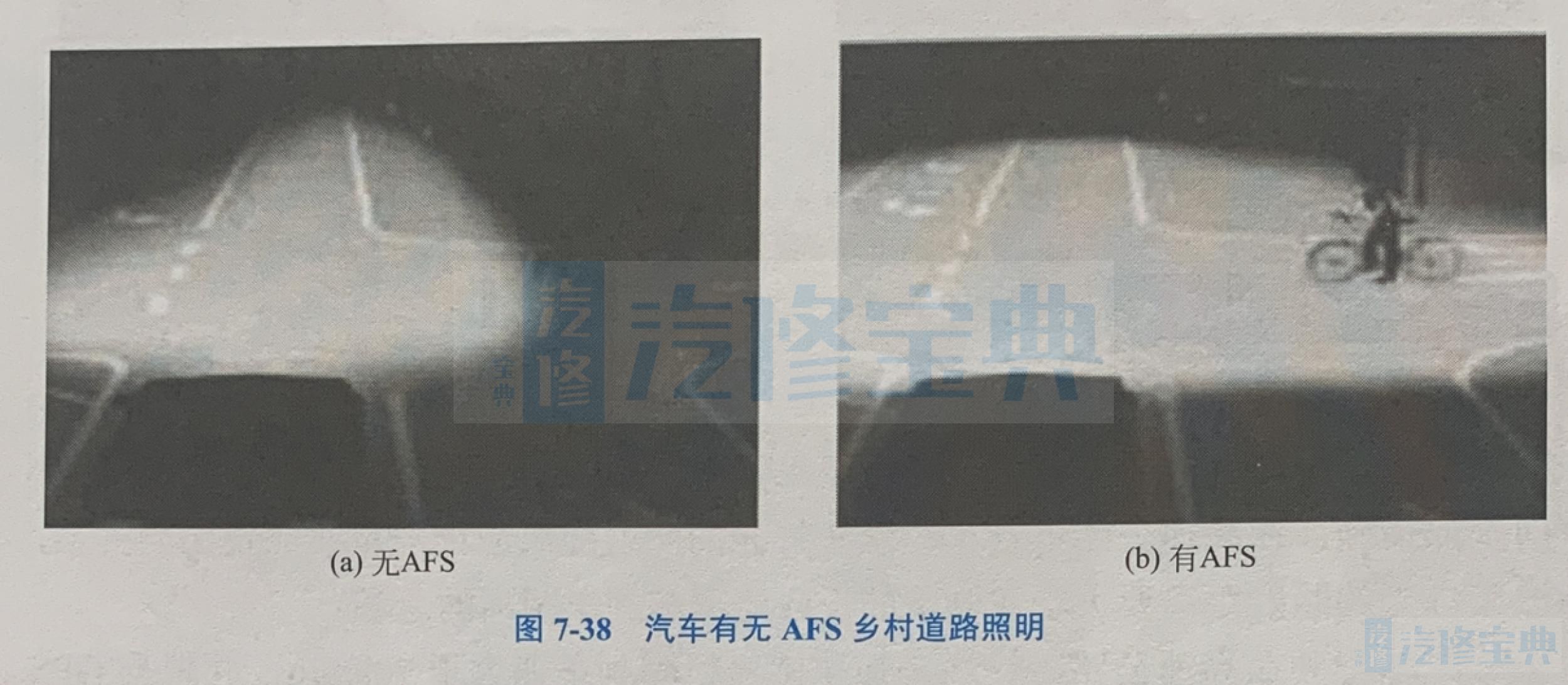
5.乡村道路照明模乡村道路外界照明条件差,岔路口多,路况复杂,路边障碍物不容易被发现:
道路狭窄,起伏不平,造成行车时车身倾斜从而导致前照灯俯仰角发生变化,容
易引发交通事故。
AFS在乡村道路照明模式工作时,通过环境光强传感器、车速传感器和GPS用来判断外界行驶条件,决定是否开启乡村道路照明模式。在乡村道路照明模式下,系统增大左右前照灯的输出功率,增强光照亮度来补充照明。依据右侧行车的交通法规,车辆在乡村道路行驶时,右侧的前照灯照射光线要向右偏转一些,拓宽右侧道路的照明范围以使灯光能够照射到路面边缘,如图7-38所示。
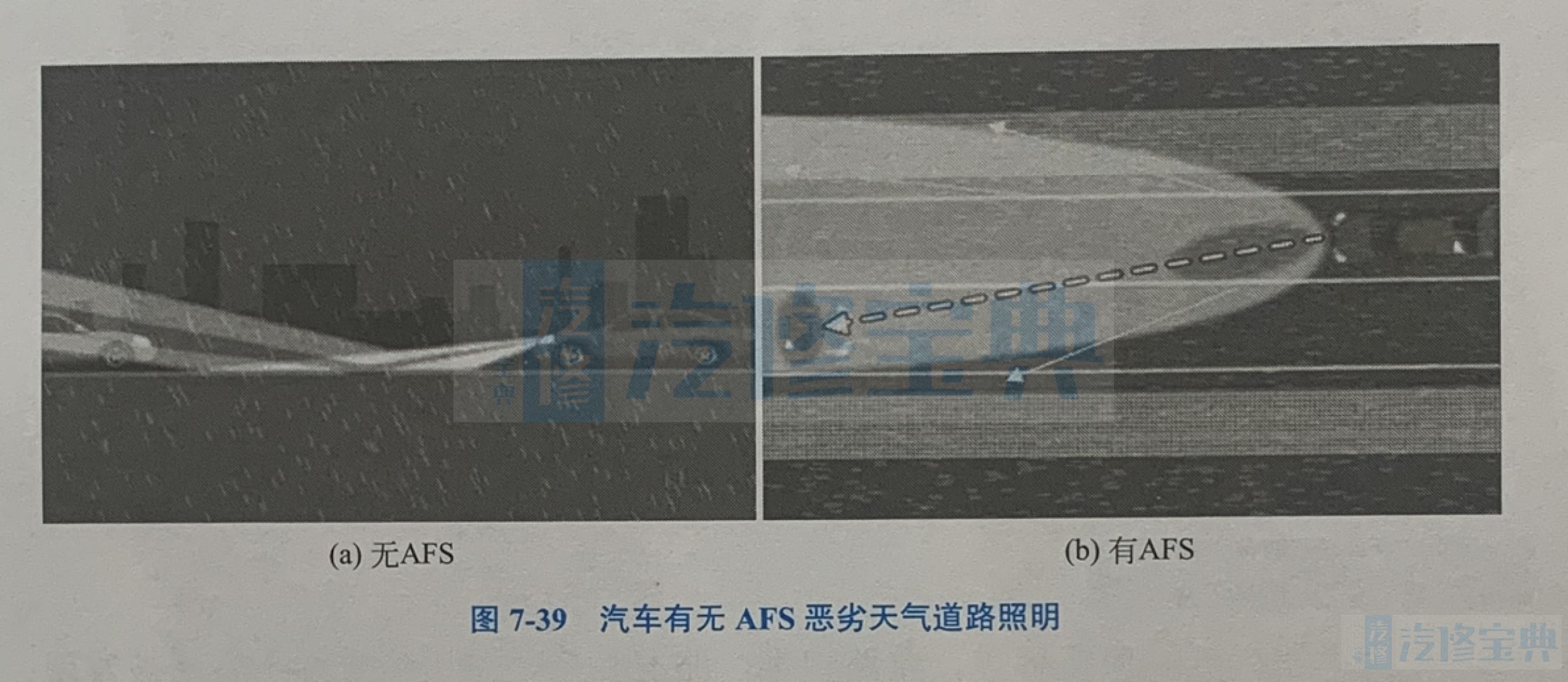
6.恶劣天气照明模恶劣天气照明模式主要针对的是阴雨天气,此时地面的积水会将前照灯打在地面上的光线反射至对面会车驾驶员的眼睛中,使其眩目,进而可能造成交通事故。在阴雨天气下行驶的车辆,AFS根据检测路面湿度、轮胎滑移以及雨量传感器判断系统状态为雨天模式,AFS驱动垂直调高电动机,降低前照灯垂直输出角,并调节其照射强度,避免反射眩光在60m范围内对迎面行车驾驶员造成眩目,如图7-39所示。
当车辆行驶在雾天或者是沙尘暴天气时,AFS根据感知雾、风速传感器、颗
粒物传感器以及环境光强传感器感知光线强弱,判断是否遇到雾天或是沙尘暴天气,从而驱动垂直调高电机,增大前照灯垂直输出角,使得照明光线有所提升,同时,开启车灯清洗装置,尽可能地使驾驶员获得较好的视觉,可以安全地行驶在可见度较低的恶劣天气中。
在汽车AFS实际开发和使用中,根据实际情况,可以对上述功能进行取舍。