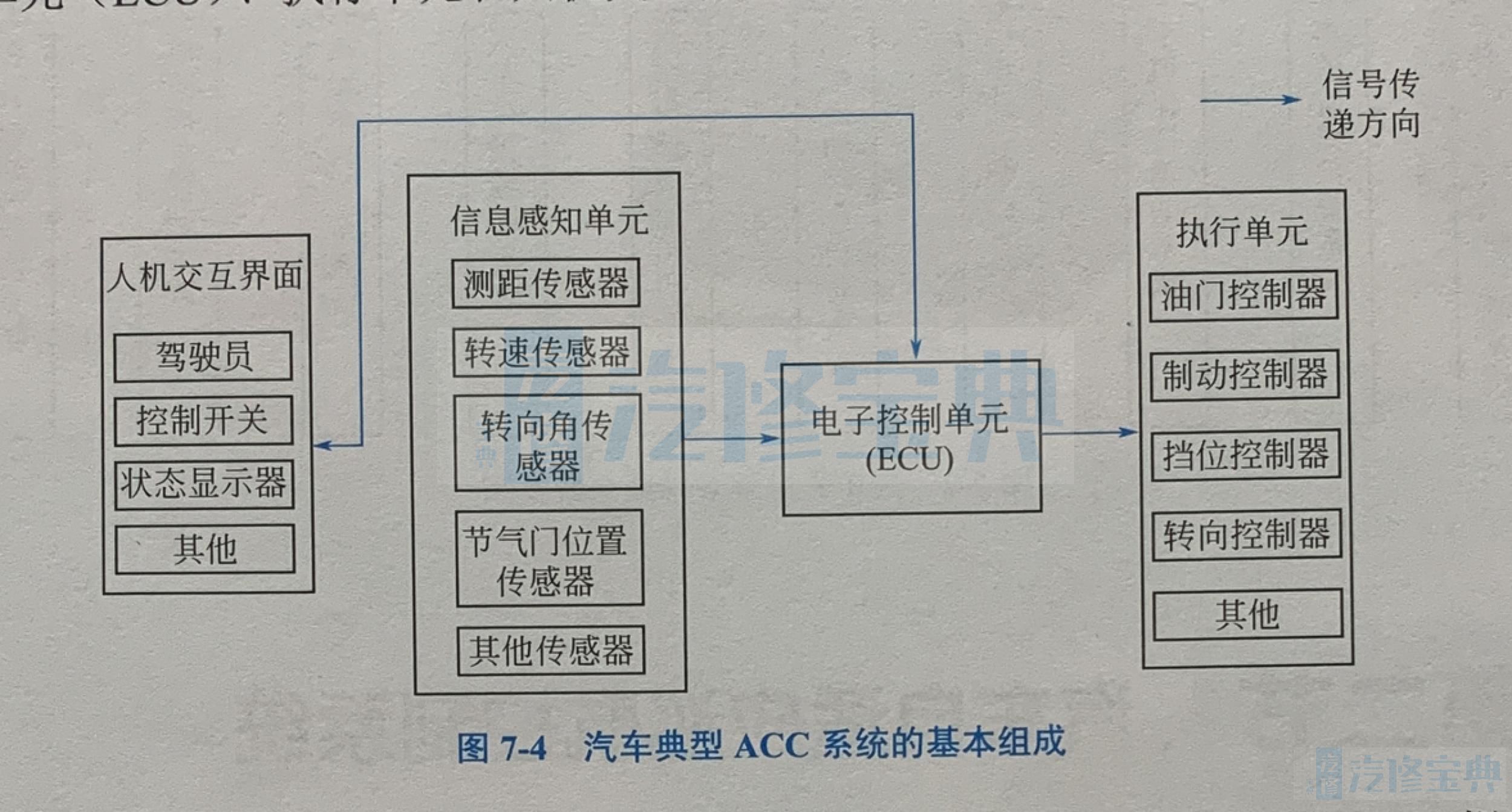
汽车典型ACC系统的基本组成如图7-4所示,主要由信息感知单元、电子控制单元(ECU)、执行单元和人机交互界面等组成。
(1)信息感知单元 信息感知单元主要用于向电子控制单元(ECU)提供自适应巡航控制所需要的各种信息。它包括测距传感器、转速传感器、转向角传感器、节气门位置传感器、制动踏板传感器等。测距传感器用来获取车间距离信号,般使用激光雷达或毫米波雷达;转速传感器用于获取实时车速信号,一般使用霍尔式转速传感器;转向角传感器用于获取汽车转向信号;节气门位置传感器用于获取节气门开度信号;制动踏板传感器用于获取制动踏板动作信号(2)电子控制单元(ECU) ECU根据驾驶员所设定的安全车距及巡航行驶速度,结合信息感知单元传送来的信息确定当前车辆的行驶状态,决策出车辆的控制作用,并输出给执行单元。例如当两车间的距离小于设定的安全距离时,
ECU计算实际车距和安全车距之比及相对速度的大小,选择减速方式,同时通过报警器向驾驶员发出报警,提醒驾驶员采取相应的措施。
(3)执行单元 执行单元主要执行电子控制单元发出的指令,它包括油门控制器、制动控制器、挡位控制器和转向控制器等,油门控制器用于调整节气门的开度,使车辆作加速、减速及定速行驶;制动控制器用于紧急情况下的制动;挡位控制器用于控制车辆变速器的挡位;转向控制器用于控制车辆的行驶方向(4)人机交互界面 人机交互界面用于驾驶员设定系统参数及系统状态信息的显示等。驾驶员可通过设置在仪表盘或转向盘上的人机界面启动或清除ACC系统控制指令。启动ACC系统时,要设定当前车辆在巡航状态下的车速和与目标车辆间的安全距离,否则ACC系统将自动设置为默认值,但所设定的安全距离不可小于设定车速下交通法规所规定的安全距离。