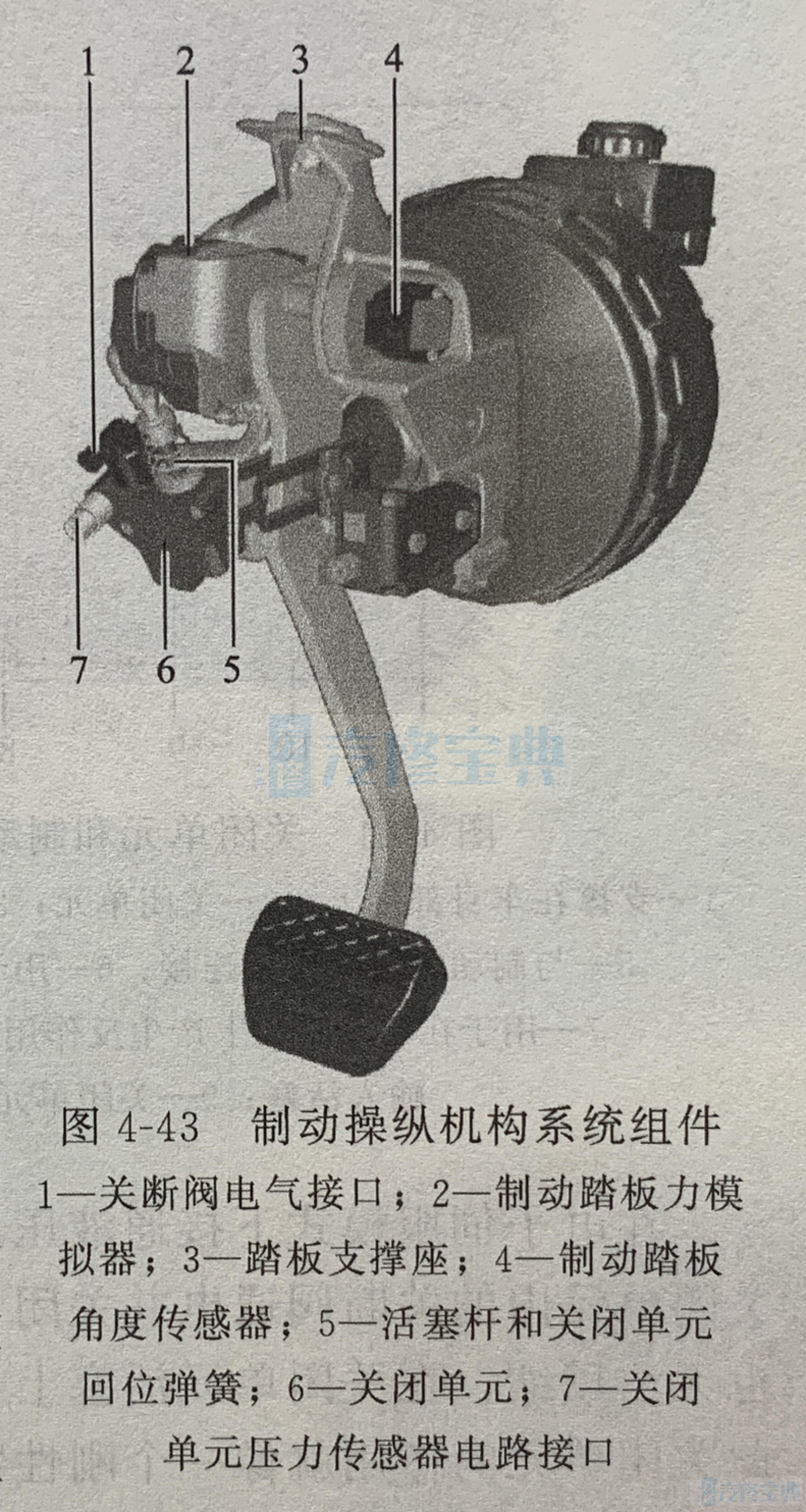
(1)制动操纵机构除制动踏板及其轴承外,制动操纵机构还包括专门用于宝马X6混合动力汽车混合动力制动系统的以下组件(图4-43):制动踏板角度传感器;制动踏板力模拟器;关闭单元。
进行维修时不能对单个部件进行单独更换,只能将包括上述组件在内的整个单元更换。
①制动踏板角度传感器 固定在踏板支撑座上的制动踏板旋转轴延长线上。操作制动踏板时产生的转角通过制动踏板角度传感器转化为电信号。为此,该传感器内部带有两个霍尔传感器这些传感器以冗余方式探测制动踏板角度。SBA控制单元读取两个传感器的模拟信号,通过将两个信号以及与制动压力传感器信号进行对比,检查信号可信度如果SBA控制单元识别出无法继续可靠探测制动踏板角度,就会启用传统模式并授权发出检查控制信息。
②制动踏板力模拟器 由于在电子伺服模式下制动踏板与液压制动系统间不存在任何机械连接,在没有制动踏板力模拟器的情况下,驾驶员在操作制动踏板时就不会得到任何反馈。因此制动踏板力模拟器产生这样一种作用力为驾驶员提供反馈。由制动踏板力模拟器产生的反作用力取决于操作制动踏板时的制动踏板行程。根据设计要求,作用力与行程的相互关系可确保制动踏板感觉与使用传统制动系统的车辆相同。制动
踏板力模拟器通过一个弹簧组合(钢板弹簧)和一个塑料块(弹性体)产生反作用力。因此它是一个以纯机械方式工作的组件。
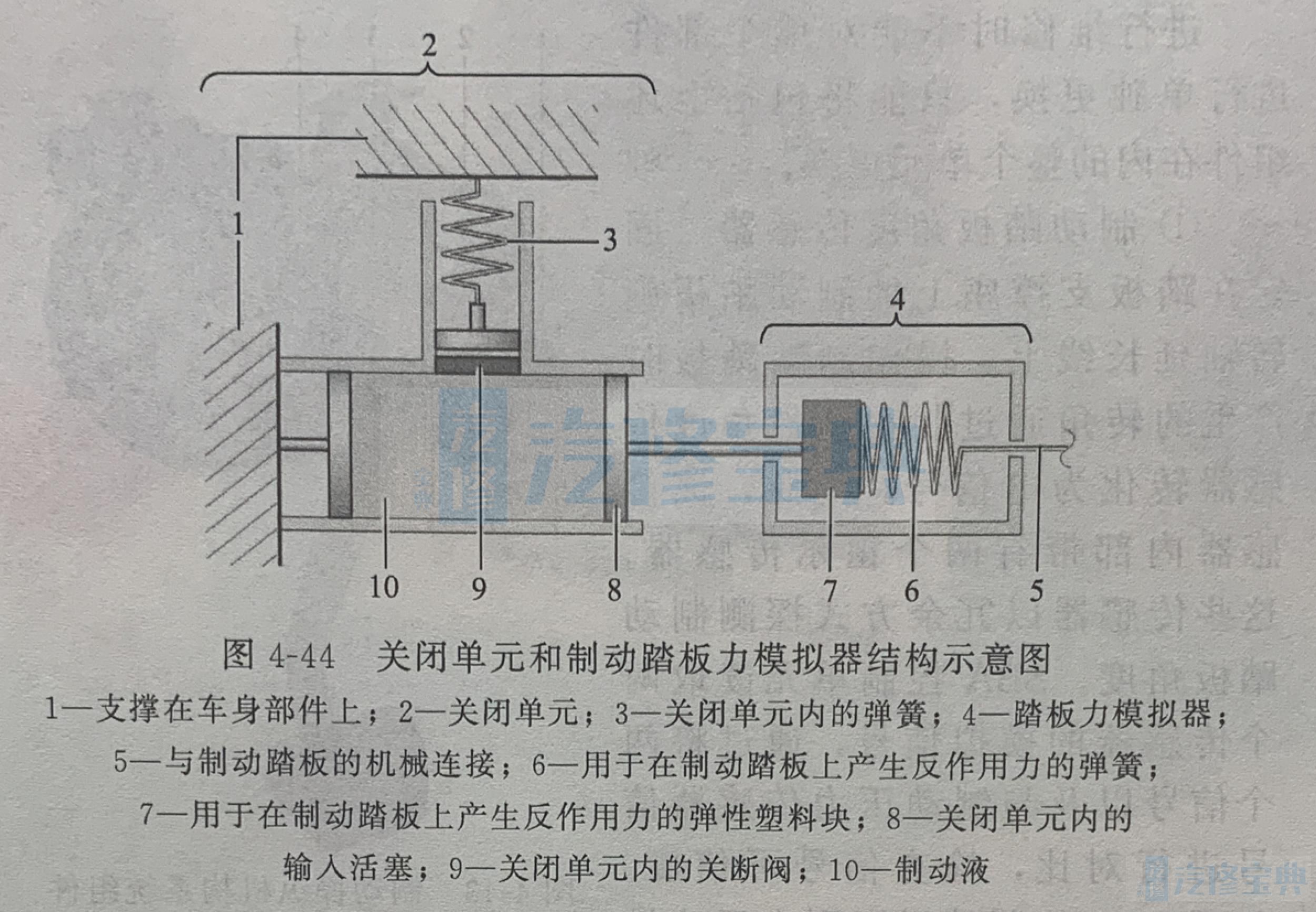
③关闭单元 满足相关条件时便可通过关闭单元结束电子伺服模式并启用传统模式。关闭单元内部由一个充满制动液的封闭液压系统构成。关闭单元的活塞通过一根杆与制动踏板力模拟器相连图4-44)。操作制动踏板时就会在该活塞杆上产生一个作用力。
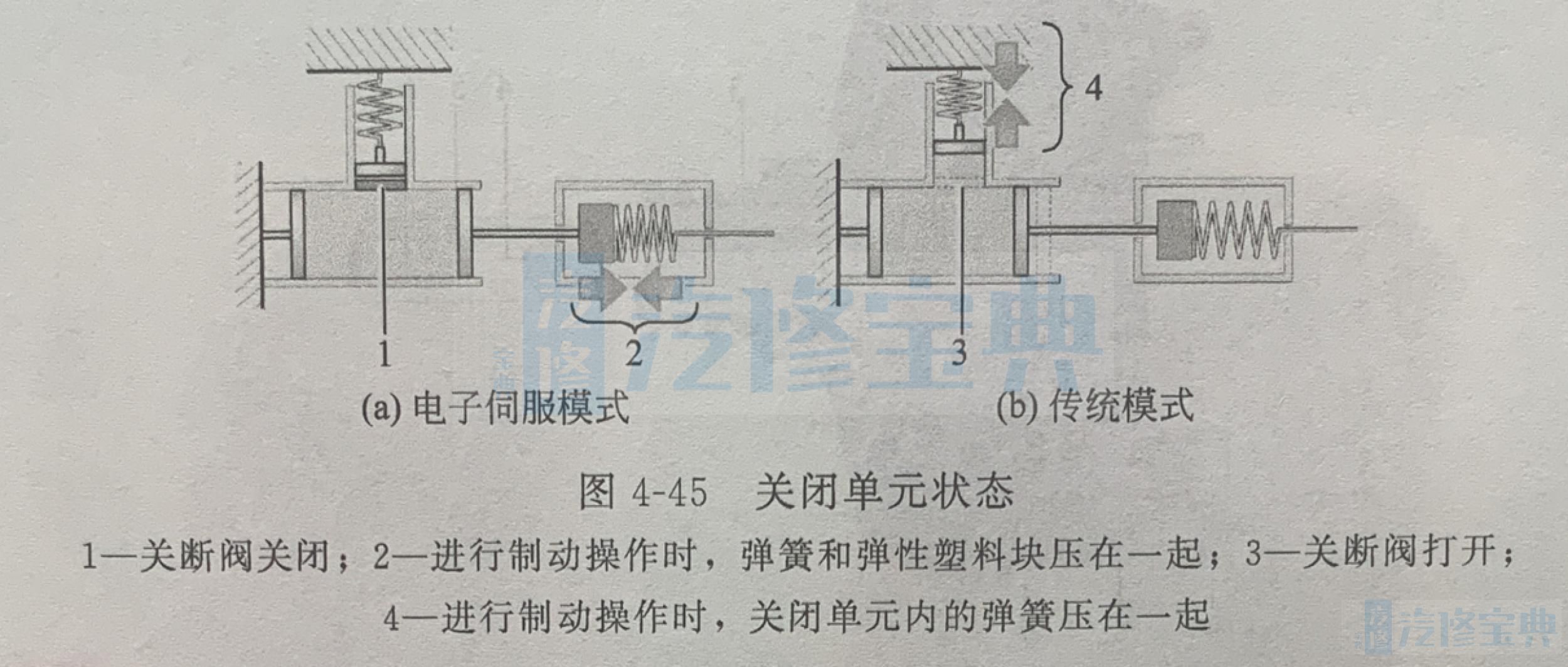
在电子伺服模式下接通液压系统时,制动液无法移动。为此使关闭单元内的关断阀通电并关闭,如图4-45(a)所示。由于制动液也无法压缩,在关闭单元活塞上会产生一个非常大的反作用力。因此关闭单元的作用就像一个刚性物体,驾驶员只能感觉到制动踏板力模拟器产生的反作用力。
在传统模式下,关断阀(未通电)处于打开状态。如果进行制动操作期间在关闭单元输入活塞上产生了一个作用力,制动液就会膨胀进入一个空间,在该空间内使另一个活塞在一个弹簧上产生作用力。该弹簧的反作用力远远低于制动踏板力模拟器,因此制动踏板力模拟器实际上不起任何作用,如图4-45(b)所示。这会使驾
驶员在操作制动踏板时感觉好像空行程增大,直至制动踏板达到压力杆上的限位位置。
除关断阀外,关闭单元还包括一个压力传感器。该传感器信号用于检查关闭单元或关断阀是否处于要求状态。关断阀打开时,进行制动操作时不允许关闭单元内产生压力。而关断阀关闭时则必须在进行制动操作时建立起压力。混合动力制动系统开始时会保持传统模式。只有驾驶员建立起约30bar(3MPa)制动压力且传感器信号相互可信时才会启用电子伺服模式。对于驾驶员而言,这样不会存在任何功能影响,因为启动车辆后总是要通过操作制动踏板挂入行驶挡位的。多数驾驶员操作制动踏板的力度都足以达到上述制动压力限值。
SBA控制单元分析压力传感器信号并控制关断阀。为此,压力传感器和关断阀分别通过一根三芯导线和一根两芯导线与SBA控制单元相连。
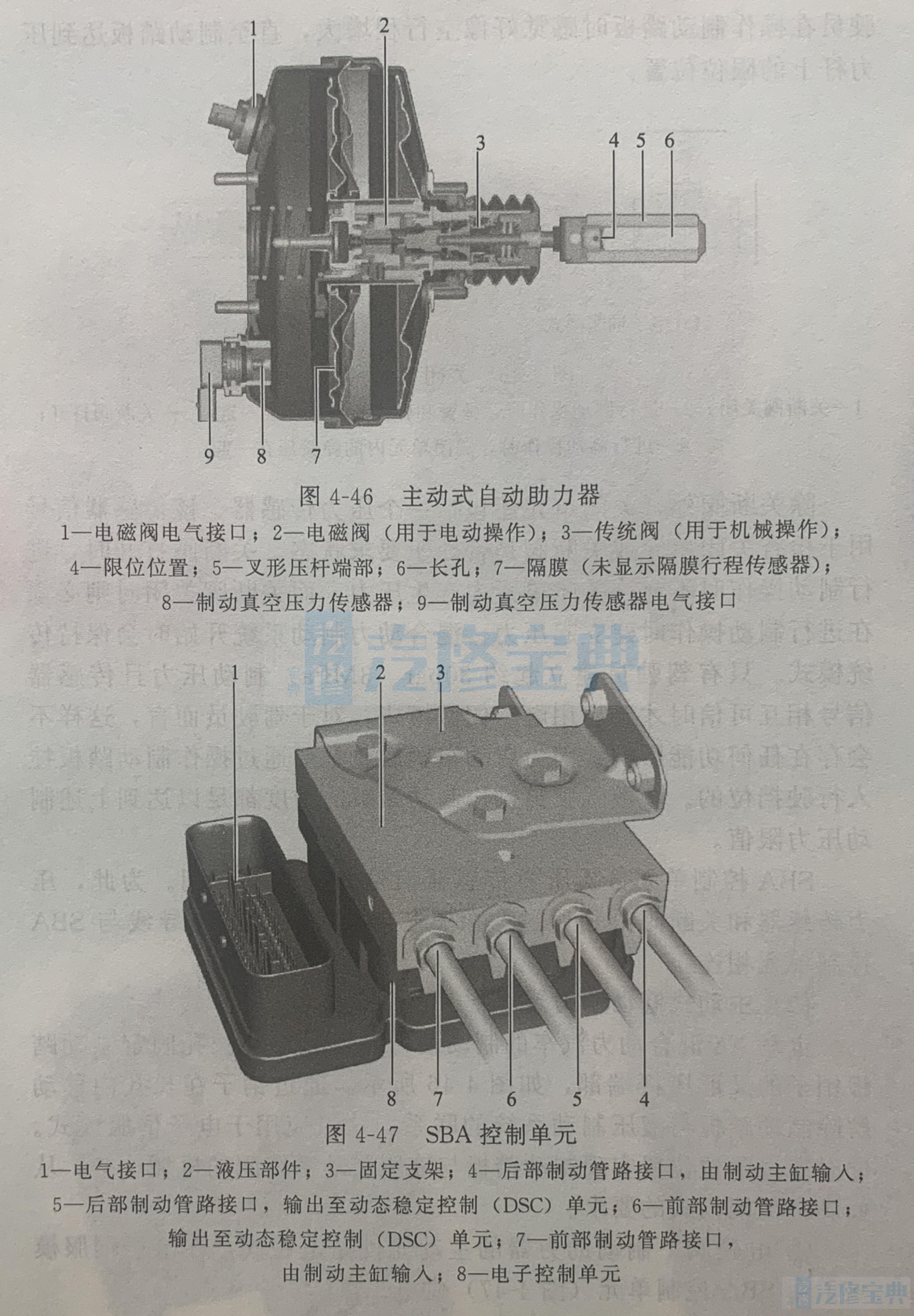
(2)主动式制动助力器宝马X6混合动力汽车的制动助力器通过一个长孔固定制动踏板销子的叉形压杆端部,如图4-46所示。通过销子在长孔内移动解除制动踏板与液压制动系统的联系。这点应用于电子伺服模式。
同时通过限位位置实现制动踏板与液压制动系统间的机械连接,从而满足传统模式的要求。
①电磁阀制动助力器的主动元件是电磁阀,在电子伺服模式下由SBA控制单元(图4-47)供电。
通过控制电磁阀可使空气进入主动式制动助力器的工作室,从而推动连杆并在制动主缸上产生作用力。因此即使不通过驾驶员进行机械操作也可以在液压制动系统内建立起制动压力。
②隔膜行程传感器 为了对主动式制动助力器电动控制功能进行持续监控,制动助力器带有一个隔膜行程传感器。它是一个随隔膜移动一起运动的探针。通过该传感器信号尤其可以发现制动液内的气泡以及液压系统泄漏情况。出现这些情况时,隔膜行程小于为电磁阀相应供电时。SBA控制单元分析隔膜行程传感器信号并进行监控。如果识别出故障,SBA控制单元就会结束电子伺服模式并切换为传统模式。
③制动真空压力传感器 无论在电子伺服模式还是传统模式下都需要通过制动真空压力来增大制动力。因此在制动助力器内装有冗余设计的制动真空压力传感器。SBA控制单元通过该传感器信号持续监控准备提供使用的制动真空压力。如果制动真空压力过低,就会控制电动真空泵。SBA控制单元发现制动真空压力供应问题时就会要求数字式发动机电子系统启动发动机。发动机运转时,机械真空泵也会随之工作,从而确保制动真空压力供应(3)混合动力制动控制单元混合动力制动控制单元,由控制单元和液压单元构成,也称为混合动力制动作用转换(又称为电子感应制动作用)单元(SBA)。
混合动力制动控制单元沿行驶方向安装在制动助力器左侧。
混合动力制动控制单元对制动控制执行主控功能。它探测驾驶员的制动要求,将整个制动转矩划分为能量回收部分和液压部分。为此,混合动力制动控制单元带有以下电气接口:制动踏板角度传感器;关闭单元关断阀;关闭单元压力传感器;制动助力器内的电磁阀;制动助力器内的隔膜行程传感器;制动助力器内的制动真空压力传感器;
电动真空泵(控制和监控);供电;总线系统 PT-CAN和H-CAN2。
为了实现能量回收部分,混合动力制动控制单元通过混合动力CAN2、混合动力接口模块和混合动力CAN总线与混合动力主控控制单元进行通信。液压部分由混合动力制动控制单元通过直接控制制动助力器内的电磁阀来实现。与所有对液压制动系统进行干预
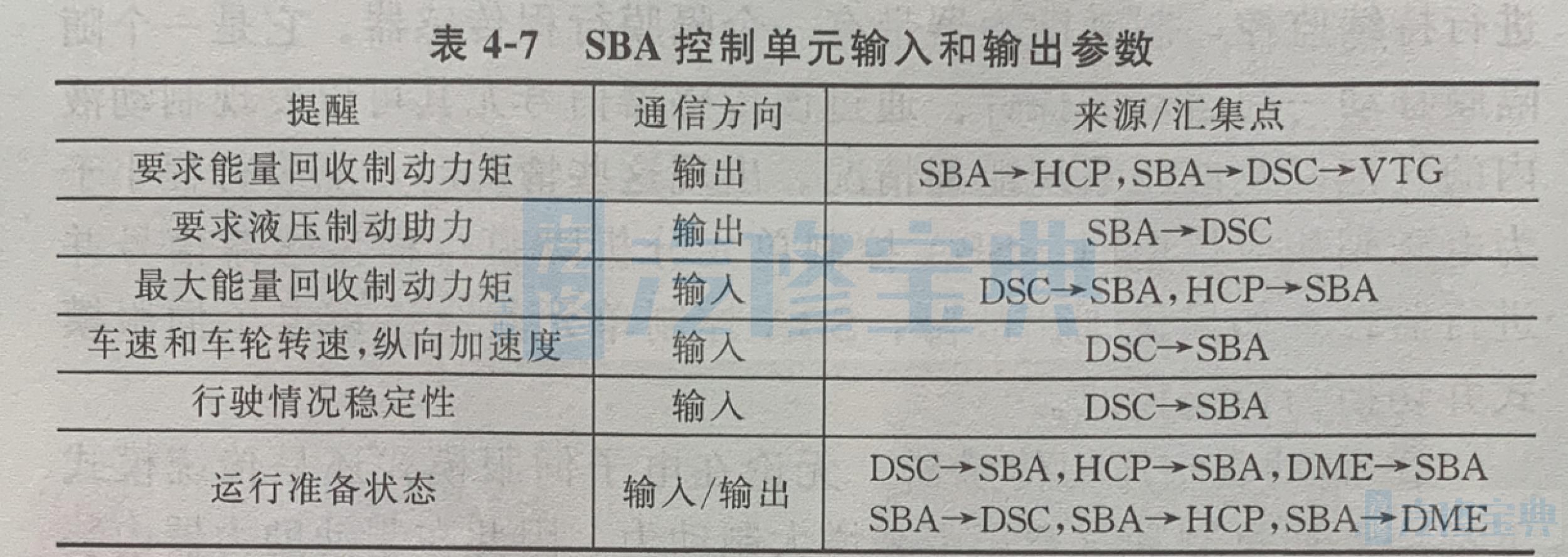
时的情况一样,在此动态稳定控制(DSC)系统的控制单元也是混合动力制动控制单元的一个重要通信设备。表4-7汇总了通过总线系统传输的重要的混合动力制动控制单元输入和输出参数,表中英文缩写词含义见图4-77。
(4)电动真空泵以纯电动方式行驶期间,发动机处于静止状态,因此也不会驱动机械真空泵。为了在此期间同样确保提供制动真空压力,宝马X6混合动力汽车上装有一个附加电动真空泵。该真空泵安装在行驶方向右侧发动机室内的曲轴箱前端,如图4-48所示。
泵元件是一个双膜片泵。其内部结构基本对称,因此两个端面上分别带有一个输入阀和一个输出阀。根据壳体盖板的形状可以识别岀这两个阀门。泵输入端与真空管路相连。真空泵通过输入端吸入空气并产生真空压力。吸入的空气通过壳体盖板上的输出孔向外输送。进行维修时,只能将电动真空泵作为整个单元进行更换。
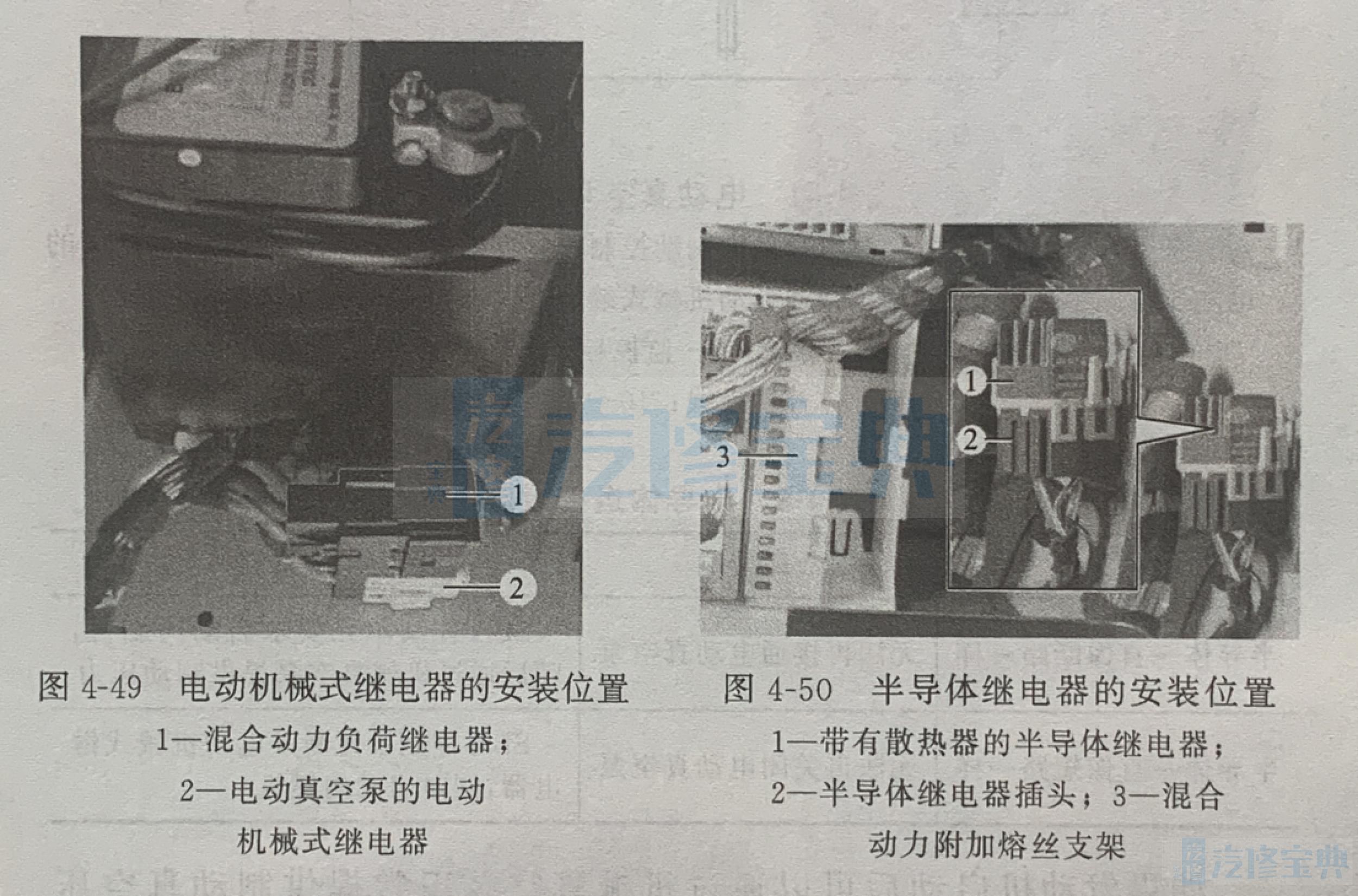
电动真空泵的电动机由混合动力制动控制单元和两个继电器供电个电动机械式继电器,安装在行李厢凹槽内第二个12V蓄电池右侧,如图4-49所示;一个半导体继电器,安装在右侧尾灯附近,如图4-50所示。
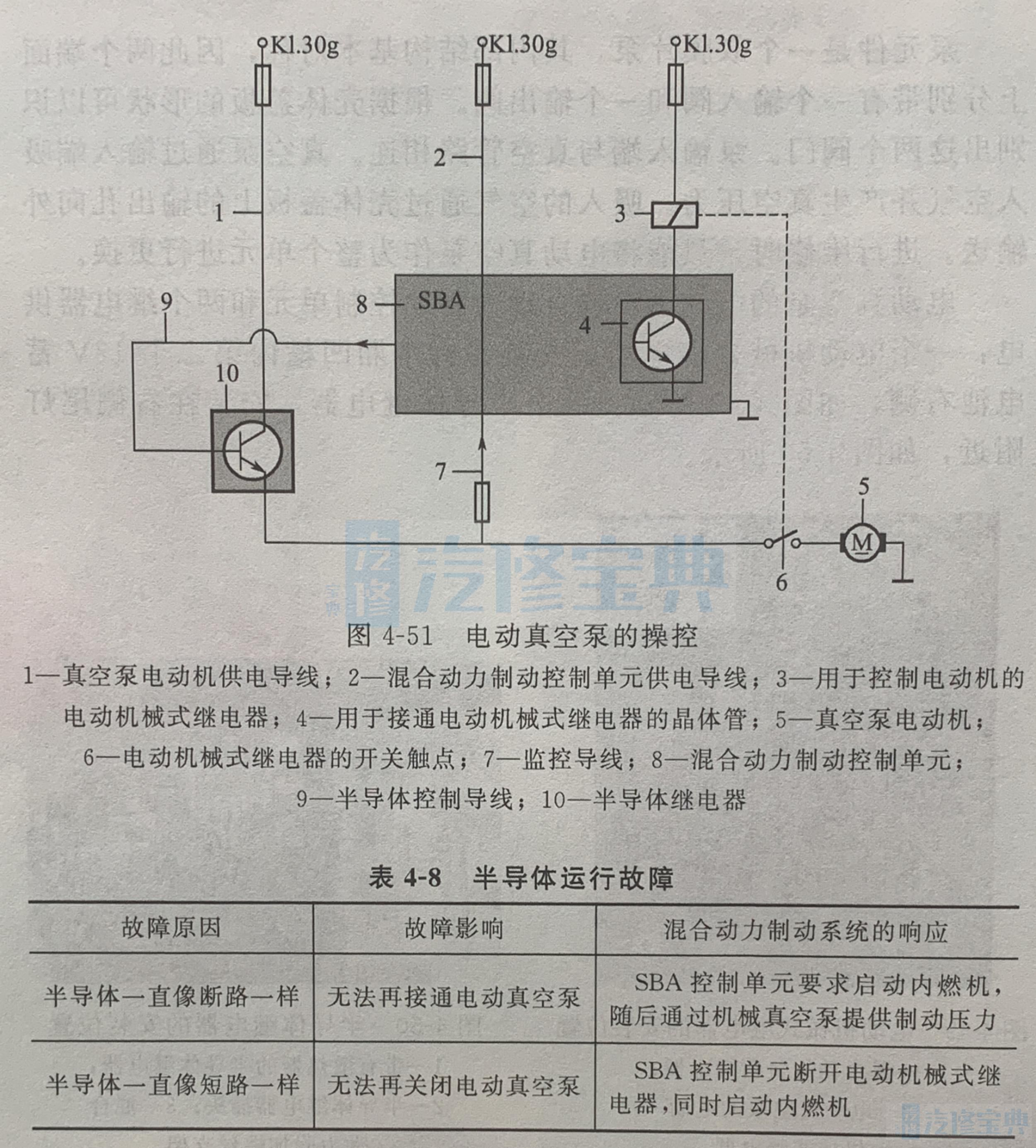
用于控制电动真空泵的两个继电器串联连接。在正常运行模式下,混合动力制动控制单元从总线端30g接通起就会接通电动机械式继电器,如图4-51所示。但电动真空泵的实际接通和关闭由半导体继电器负责。它具有可使换挡过程无磨损、无噪声的优点此处所用的半导体也设计用于整个车辆使用寿命期间。如果半导体部件损坏,必须采取措施以确保混合动力制动系统可以继续可靠运行,其运行故障见表4-8。
如果发动机启动后可以通过机械真空泵正常提供制动真空压力,即使出现电动真空泵故障,混合动力制动系统也会保持在电子伺服模式下。否则,混合动力制动系统就会切换为传统模式。
混合动力制动控制单元可以通过半导体输出端与电动机械式继电器开关触点间分出的监控导线识别出部件故障。混合动力制动控制单元测量该监控导线上的电压并将其与所需切换状态决定的期望值(继电器接通或关闭)进行比较。混合动力制动控制单元根据发动机是否运转以及制动助力器上制动真空压力测量值的信息控制按
需接通和关闭电动真空泵。制动真空压力过低时就会接通电动真空泵。
(5)动态稳定控制系统宝马Ⅺ6混合动力汽车动态稳定控制系统的软件功能范围必须针对混合动力制动系统的系统网络进行相应调节。在此简要列出了相关调节:提供液压制动助力;在能量回收式制动期间控制分动器内的片式离合器;分析行驶状态稳定性并以总线电码形式提供。