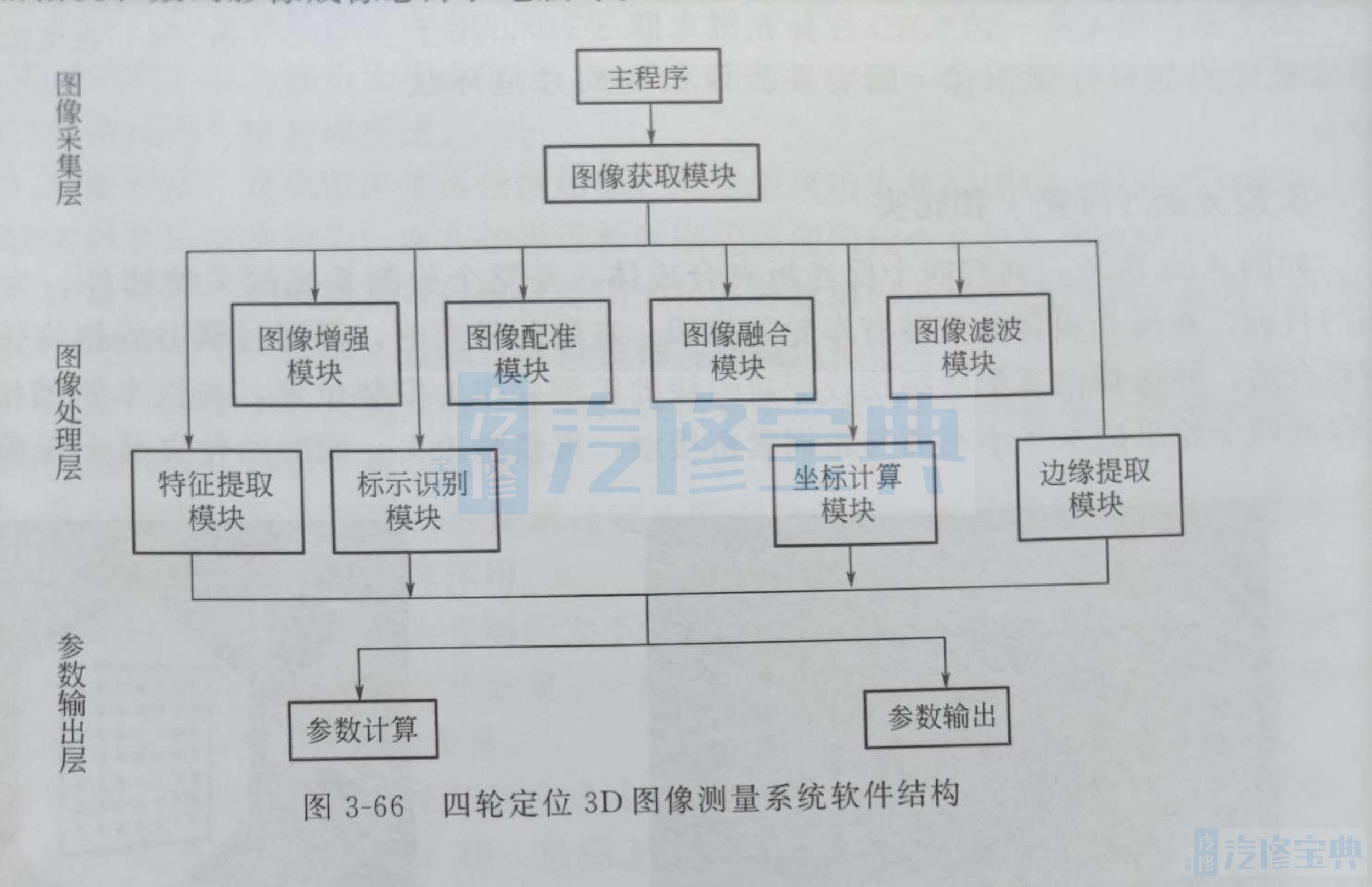
3D动态工业照相机成像技术主要采用物理透视学的基本原理与计算机信息处理技术如图3-66所示为四轮定位3D图像测量系统软件结构。图像测量系统主要部件有反光板、镜头、工业照相机、数码影像成像芯片、电脑等。
返回顶部