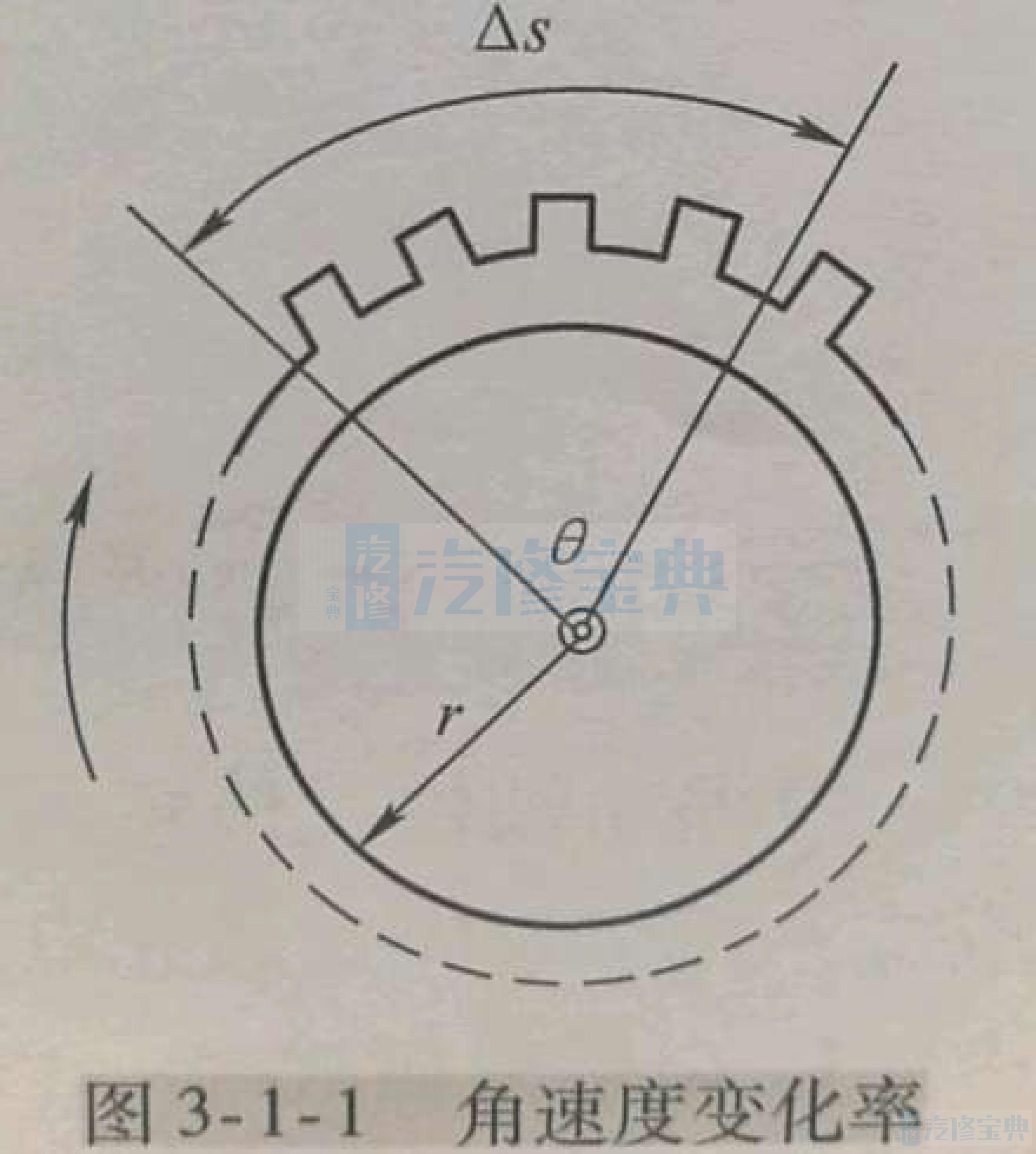
由于汽车的内部元件大部分呈现出圆周旋转的特点,在汽车上所使用的传感器,许多是用来检测物体旋转运动时的角速度变化率,即圆弧长与时间的变化率。如图3-1-1所示,一次圆周运动所经过的弧长为△s,对应的圆心角为θ,经过的时间为△t
式中:W-单位时间内弧长的变化率;
△t-单位时间;
△s-弧长。
由于利用这样的检测方法可以获得运动物体的角速度变化率,所以,汽车上的速度传感器起着给控制单元实时确定运动部件“即时位置”的重要作用。


由于汽车的内部元件大部分呈现出圆周旋转的特点,在汽车上所使用的传感器,许多是用来检测物体旋转运动时的角速度变化率,即圆弧长与时间的变化率。如图3-1-1所示,一次圆周运动所经过的弧长为△s,对应的圆心角为θ,经过的时间为△t
式中:W-单位时间内弧长的变化率;
△t-单位时间;
△s-弧长。
由于利用这样的检测方法可以获得运动物体的角速度变化率,所以,汽车上的速度传感器起着给控制单元实时确定运动部件“即时位置”的重要作用。

返回顶部