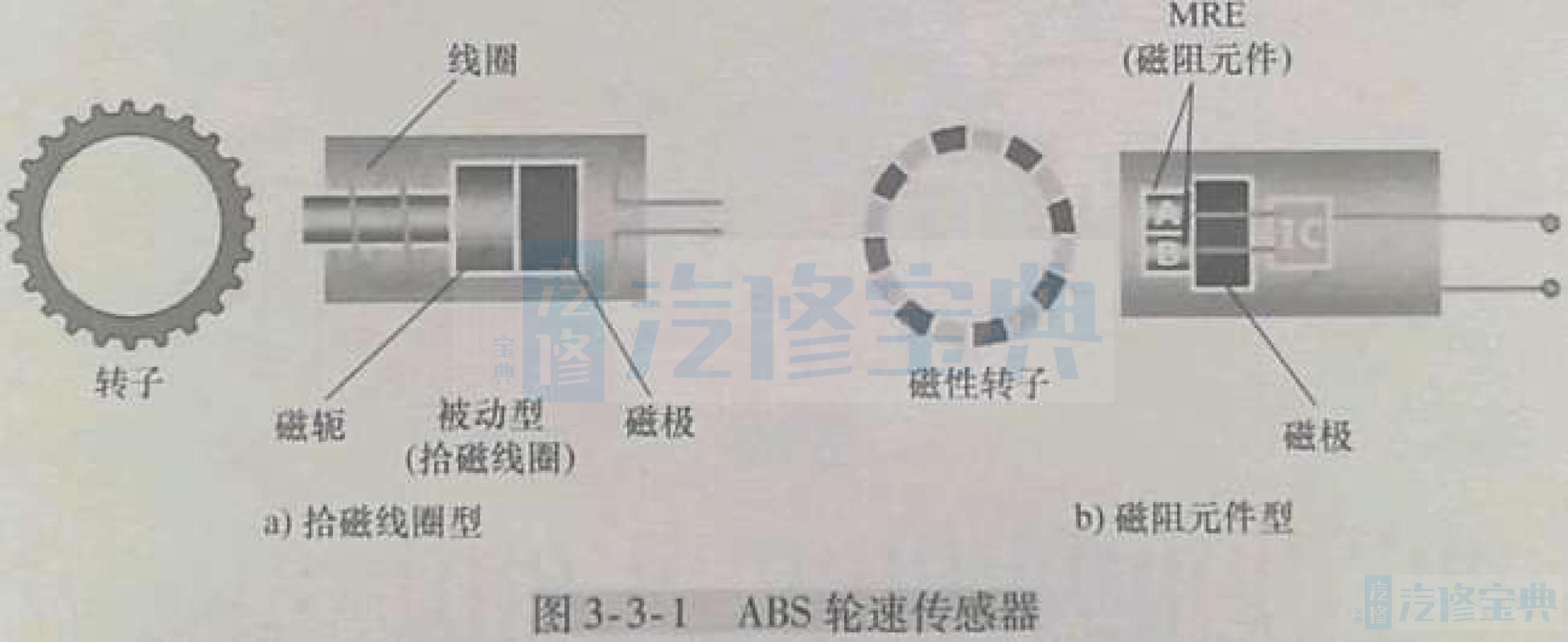
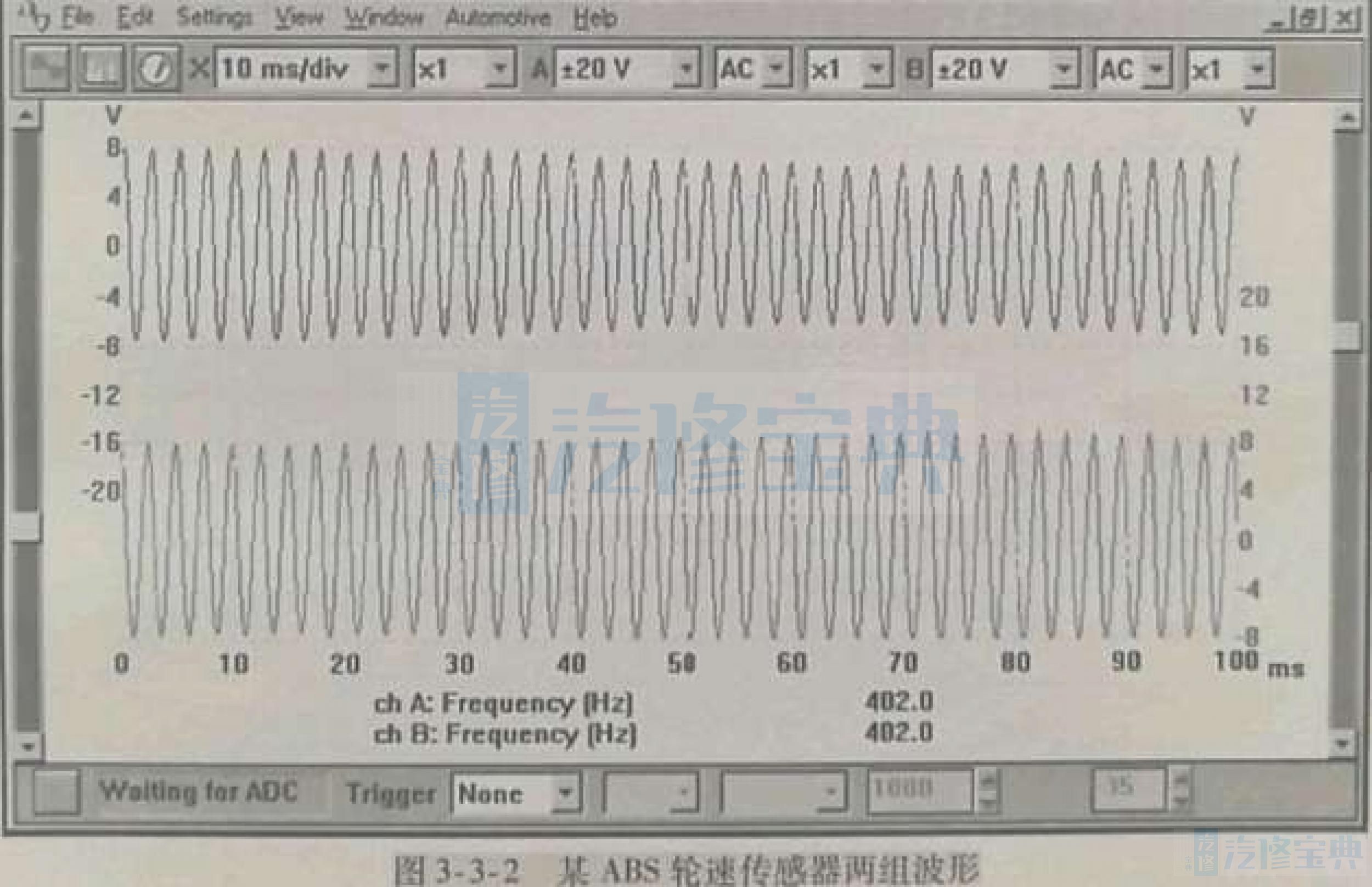
轮速传感器是一个经常被低估的传感器,它大部分是使用拾磁线圈型的传感器,如图3-3-1a所示,还有是使用磁阻元件型(主动轮速型)的,如图3-3-1b所示。 1.ABS轮速传感器(电磁感应式)。 ECU接收来自轮速传感器的正弦交流输入信号,对传感器的输出电压幅值和阻抗都有严格的要求。ABS轮速传感器通常为两线连接型(一些会有一条同轴线连接到外壳),ABS的电压输出可用示波器监测到。 图3-3-2为某车的ABS轮速传感器波形图。从该波形图可以发现,两个轮速传感器波形比较干净,无杂波,两组波形均在+8V及-8V之间。横向坐标是10ms,纵向坐标是4V两组波形的频率均为402Hz。
奇瑞旗云的电磁感应式ABS轮速传感器的波形如图3-3-3所示,波形电压在0-2.72V之间,波形频率是111.6Hz,同时对照上图3-3-2,可大致推测若是怠速下测量,奇瑞旗云ABS轮速传感器触发齿是上图车型的ABS轮速传感器的1/4。同时,由于奇瑞旗云ABS轮速传感器的齿数稀疏,更加明显反映出气缸在压缩行程出现的峰-峰值降低的情况。
通常,轮速传感器的信号振幅随轮速增加,波形在零伏线上下的跳变是非常对称的。速度越快、波形幅值就越高,而且轮速增加,波形频率也将增加,示波器将显示有较多的波形振荡。电磁感应式轮速传感器尖峰高低不平是因传感器的线圈与磁阻轮相碰所引起的,这可能是由于传感器的轴衬或传动部件不圆造成的,尖峰丢失是损坏缺点的磁阻轮造成的。
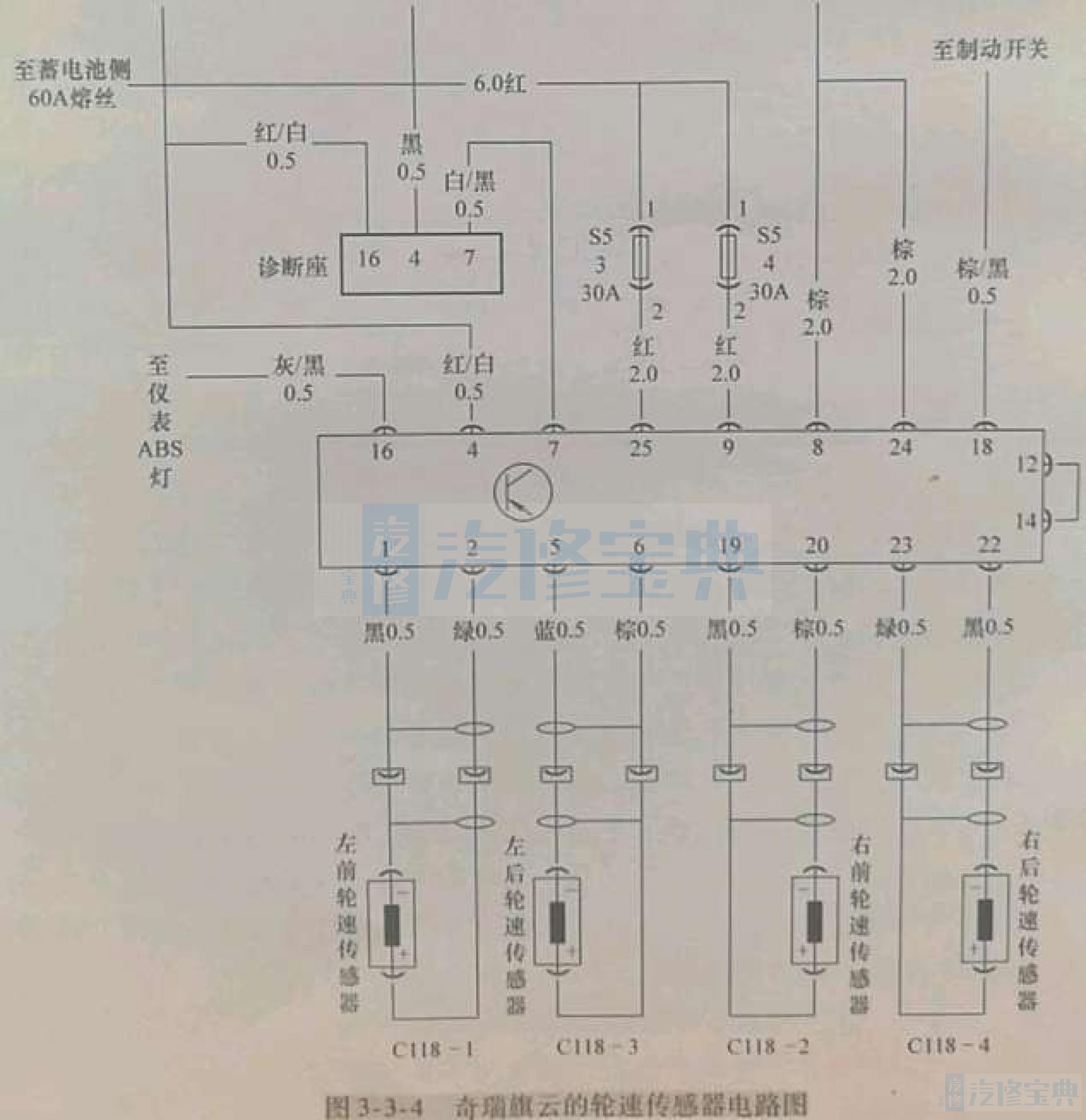
通过图3-3-4奇瑞旗云的电路图,可以看出该车有四个轮速传感器,连接ABS模块。
2.ABS轮速传感器(MRE磁阻式)丰田皇冠主动型轮速传感器工作原理,如图3-3-5a所示。其中MRE的意思就是磁阻元件。磁性转子及主动型轮速传感器的安装位置如图3-3-5b所示。
通常,磁阻元件型的轮速传感器的信号触发轮,是利用磁环的形式安装在车轮轴承中的。因此,在检查维修中要注意其这一特性。可以用千斤顶把一个轮子顶起来,将汽车示波器连接到轮速传感器上读取波形。
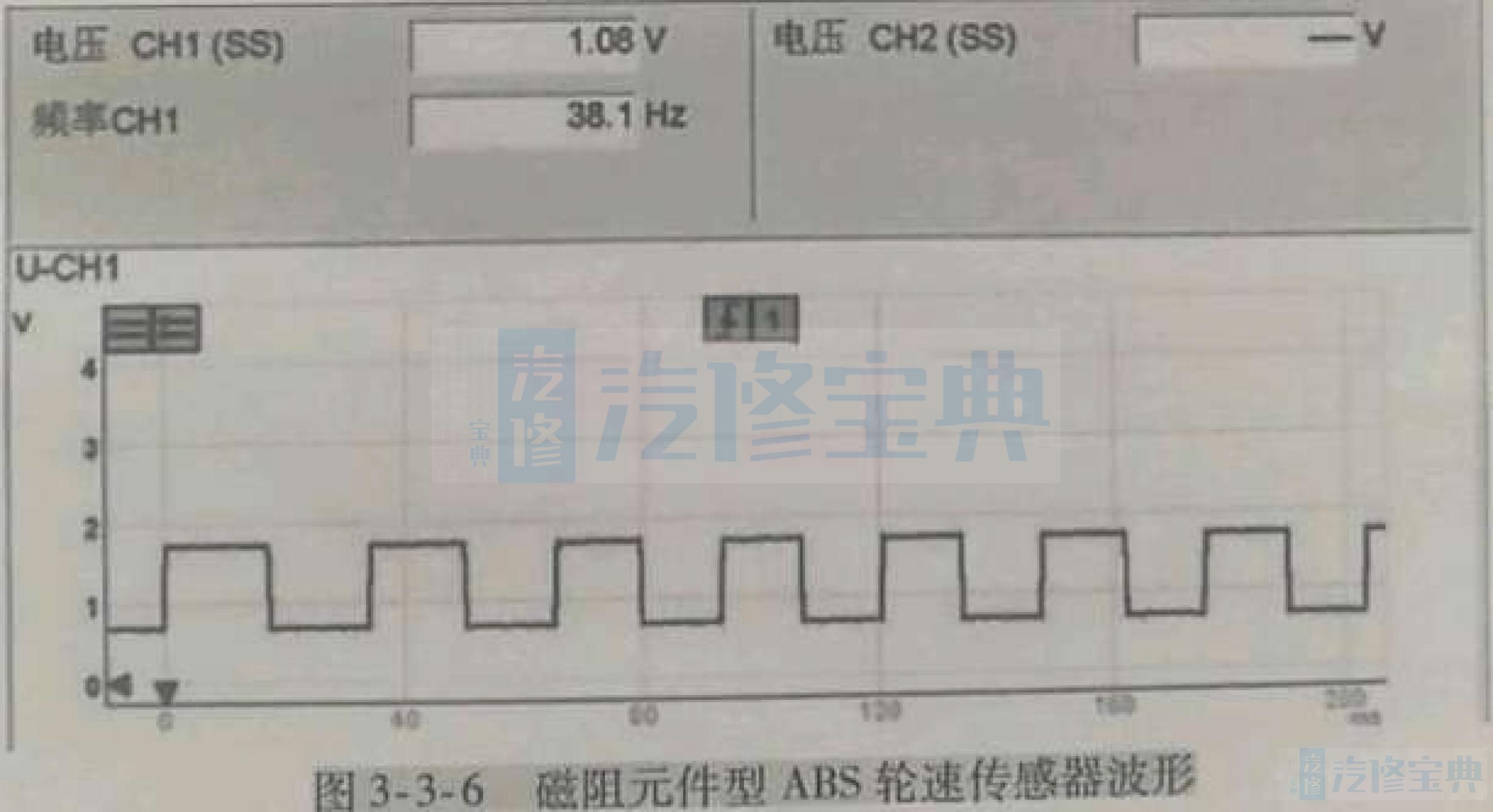
图3-3-6所示为BMW520i的磁阻元件型ABS轮速传感器波形,图中霍尔电压大小比较稳定,不随轮速变化而变化。
确认从一个脉冲到另一个脉冲的幅度,频率和形状是一致的,两脉冲间隔一致,形状致,且与预期相同。确定波形的频率与轮速同步,并且占空比无变化,还要观察如下内容。
1)观察波形的一致性。
2)检查波形顶部和底部尖角。
3.主动型与从动型轮速传感器波形对比(1)主动型轮速传感器主动型传感器是基于霍尔效应原理而将被测量信号(如电流、磁场、位移、压力、压差、转速等)转换成电动势输出的一种传感器。主动型轮速传感器也是由传感头和齿圈组成。传感头由永磁体、霍尔元件和电子电路等组成,永磁体的磁力线穿过霍尔元件通向齿轮,穿过霍尔元件的磁力线集中,磁场相对较强。齿轮转动时,使得穿过霍尔元件的磁力线密度发生变化,因而引起霍尔电压的变化,霍尔元件将输出一个毫伏(mV)级的准正弦波电压。此信号还需由电子电路转换成标准的脉冲电压。
(2)从动型轮速传感器从动型轮速传感器基本工作原理:由一组穿过线圈的电磁铁组成。当轮齿的凸出部分接近传感器导磁体时,磁通量增加;轮齿的凸出部分离开导磁体时,磁通量减小。轮齿的运动结果引起磁通量随时间变化,在线圈中感应出成比例的交流电压。此电压输送给CPU,经其后处理电路将输入信号变为数字脉冲信号。CPU根据脉冲信号的频率变化来测量车轮速度。
这两种传感器对比,见表3-3-1。
在轮速检测方式上面,如图3-3-7所示,可以清晰反映两种不同轮速的传感器信号的区别。
在旋转方向检测方法,主动型轮速传感器,可以通过霍尔波形电压的不同之处,反映轮速传感器的减速度,如图3-3-8所示。