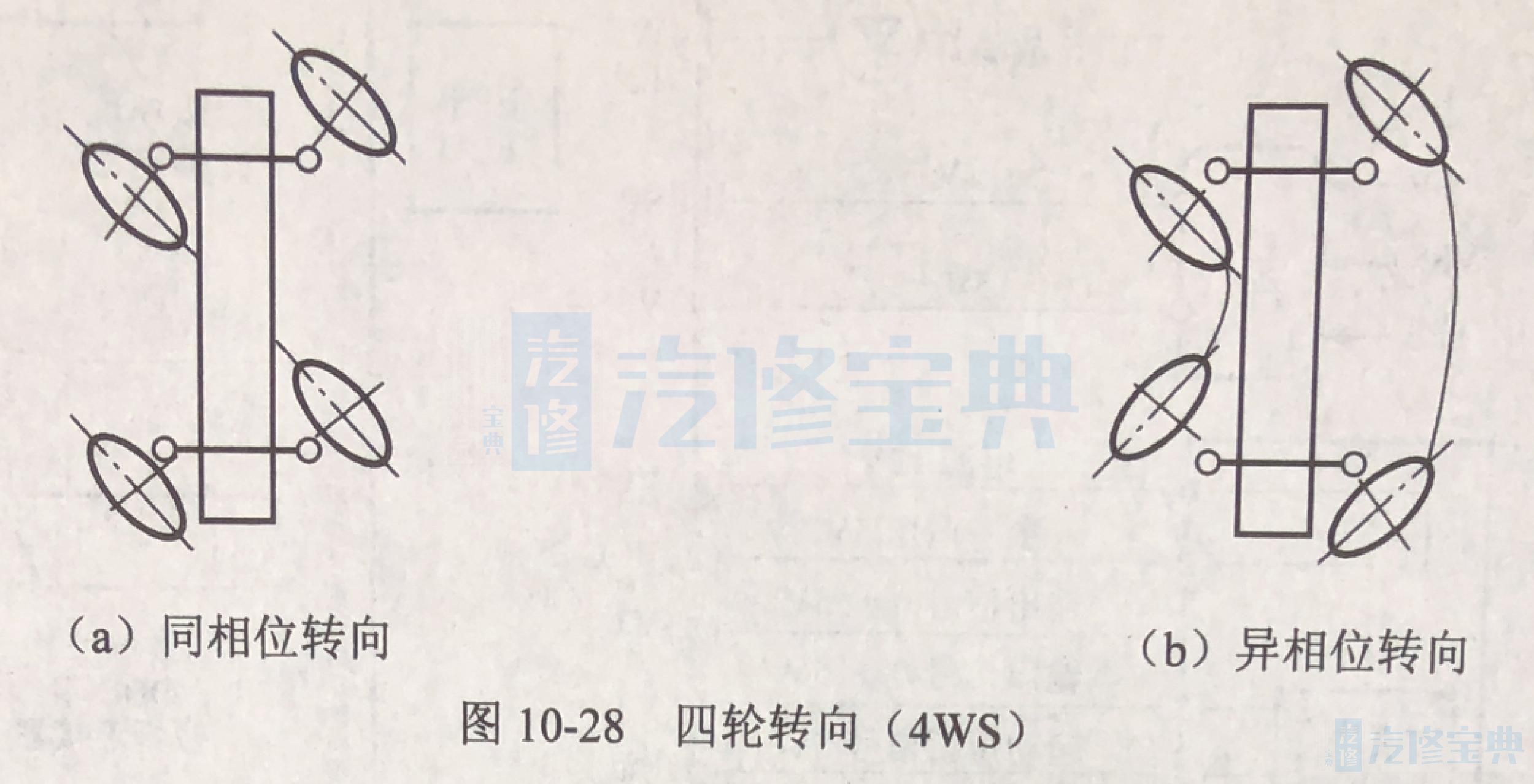
普通乘用车多使用两轮转向系统,操纵方向盘控制前轮胎的偏转,使汽车转向。随着高速公路和高架公路及高架螺旋引桥的出现,同向并行车辆的增多和行驶速度的提高,超低压轮胎的使用、轮胎的弹性侧偏角(a)对不足转向特性的影响力度加大、长时间的高速加转向螺旋升降行驶、制动加转向综合操纵性能的要求,都远大于过去。为此,电控四轮转向系统4WS(4 Wheel Steering)应运而生,主要用于轿车、长轴距的豪华型乘用车和越野汽车。 四轮转向是指前、后轮都能转向,能实现同相位转向和异相位转向,对后轮转角能进行异相位修正,能有效地控制汽车不足转向特性的保持,使汽车在连续同向转向状态下能高速安全行驶,如图10-28所示。
1.同相位转向。
适于高速行驶中转向(>40km/h),进行同相位操作。即后轮的偏转方向和前轮的偏转方向相同,转向稳定性好,后轮无侧滑,并能进行异相位修正,保证弹性侧偏角(α>α),处于不足转向状态。特别是上下高速公路和高架桥的引桥时,在连续同方向弯道上高速行驶,必须使汽车处于不足转向状态,保证同向并行车辆的安全。
2.异相位转向。
适于低速转向行驶中转向,进行逆相位操作。即后轮的偏转方向和前轮的偏转方向相反,转向半径小,灵活性好,适于在低车速时出入车库、停车场、窄路调头。
3.后轮转向控制。
四轮转向的汽车,后轮进行相位转换和异相位修正α,必须具备三个条件,逻辑门电路的控制条件是:
(1)转向角度传感器有较大的转向角度信号。
(2)车速传感器VSS有高速信号(>40kmh)。
(3)轮速传感器内外轮的角速度有明显的差值。
旦这三个条件成立,后轮的异相位的角度修正就自动控制,保证了不足转向特性的实现。
四轮转向系统有两种不同的结构形式,都必须用电脑4WS/ECU和相关的电控元件和电控液动元件来进行控制,完成相位的转换和相位角α的修正。