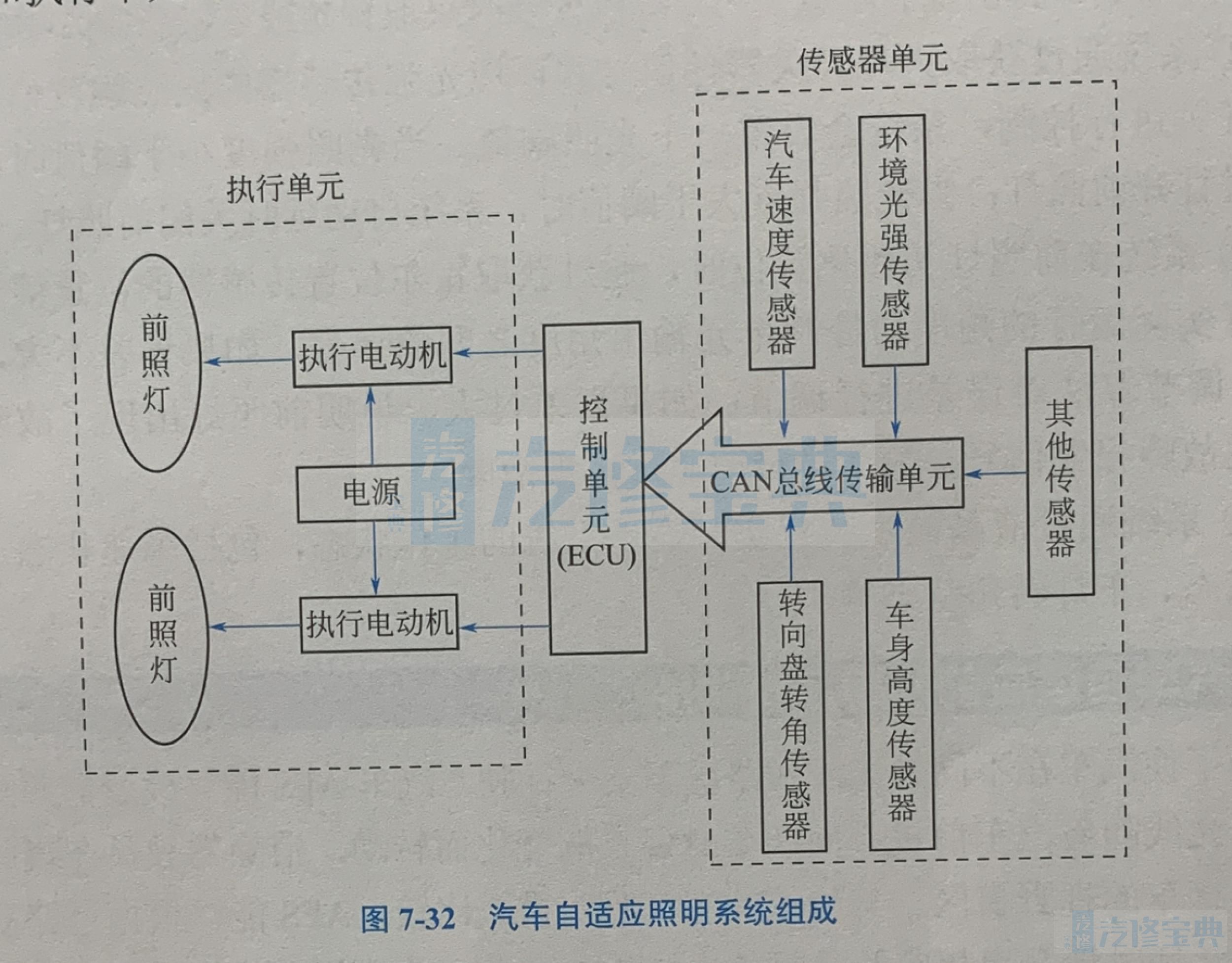
汽车自适应前照明系统主要由传感器单元、CAN总线传输单元、控制单元(ECU)和执行单元等组成,如图7-32所示。
(1)传感器单元 传感器单元是采集车辆当前信息(如车速、车辆姿态、转向角度等)和外部环境(如弯道、坡度和天气等)的变化信息,包括汽车车速传近感器、转向盘转角传感器、环境光强传感器、车身高度传感器、位置传感器等。
(2)CAN总线传输单元 CAN总线传输单元负责把各种传感器采集的信传输给控制单元,实现内部控制与各种传感器检测以及执行机构之间的数据通信。
(3)控制单元(ECU) 控制单元需要对车辆行驶状态做出综合判断,输出脉冲变量给执行单元。
(4)执行单元 控制单元输出的信号给执行单元的执行电动机,调节前照灯的照射距离和角度,为驾驶员提供更广阔的视野,保障行车安全。